
国際特許分類[G01B11/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 光学的手段の使用によって特徴づけられた測定装置 (13,565) | 長さ,幅または厚み測定用 (1,947) | 厚み測定用 (668)
国際特許分類[G01B11/06]に分類される特許
41 - 50 / 668
膜厚の検査装置および検査方法
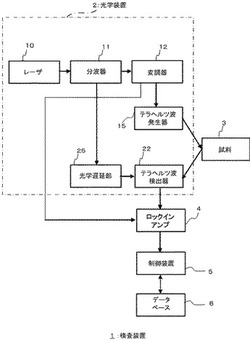
【課題】 曲面を有する膜厚を正確に計測する。
【解決手段】 膜厚の検査装置は、テラヘルツ波を発生させるテラヘルツ波発生器15と、前記テラヘルツ波を、膜が形成された試料に照射させる照射光学系16、17と、前記試料において反射したテラヘルツ波を検出し、検出信号を出力するテラヘルツ波検出器22と、前記試料の反射面の形状情報に基づき、当該反射面から前記テラヘルツ波検出器に至るまでの反射波の電場強度を参照信号として算出し、前記参照信号を用いて前記検出信号を補正する制御装置5を備える。
(もっと読む)
膜厚分布測定装置および塗膜形成装置

【課題】生産性を低下させることなく、帯状基材に塗膜を精度よく形成することができる塗膜形成装置を提供する。
【解決手段】塗膜形成装置は、帯状基材10を搬送するローラ70と、帯状基材10の長さ方向に塗膜を形成する塗工部とを備えた塗膜形成装置である。この装置は、帯状基材10の幅方向に沿って一直線上に配置された複数の変位センサ20A、20Bと、複数の変位センサ20A、20Bを帯状基材10の幅方向に走査させることによって、帯状基材10に形成された塗膜12の膜厚分布を測定する膜厚分布測定部100と、膜厚分布測定部100で測定された塗膜12の膜厚分布に基づいて、塗工部によって帯状基材10に形成される塗膜12の位置、塗膜の幅および塗膜の厚さをそれぞれ制御する制御部とを備える。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 対物レンズ57が、ガラス管Gに照射されるレーザ光を集光させて、その反射光を回折格子35及びラインセンサ36で受光してガラス管Gの厚さを測定する。対物レンズ57をX軸線方向の焦点距離Fxと、Y軸線周りに回転するガルバノミラー52から対物レンズ57までの光学的距離aと、対物レンズ57からガラス管Gの表面までの光学的距離bとの関係が、(1/a)+(1/b)=1/Fxの関係になるようにする。レーザ光の光軸がガラス管Gの中心軸に垂直になるようにY軸線周り角度のサーボ制御を行っても、X軸線方向におけるレーザ光のガラス管Gへの照射位置を変化させないように1点に固定することができて、ガラス管GのZ軸線周りの傾きの度合によりサーボが不安定になることを抑制する。
(もっと読む)
基板処理装置に用いられるプロセスモニター装置、プロセスモニター方法、および基板処理装置
【課題】光学的手法を用いて被処理基板の構造をより高精度に評価することができるプロセスモニター装置を提供する。
【解決手段】プロセスモニター装置11は、光を出射する光源部と、光の強度を検知可能な光検知部と、光源部から出射された光をウェハWまで導き、ウェハWから反射した反射波を光検知部まで導く第一光経路21と、第一光経路21と同等の光伝搬特性を有するように構成され、光源部から出射された光を、ウェハWを経由することなく光検知部まで導く第二光経路と、第二光経路を通して光検知部により検知された光の強度情報に基づいて、第一光経路21を通して光検知部により検知された光の強度情報を補正し、ウェハWの構造を解析するコントローラ17とを備える。
(もっと読む)
ガスバリア膜、その製造装置、及びその製造プログラム
【課題】ガスバリア膜において、可視光の透過性と被覆性及び可撓性との良好なバランスを実現することができる技術の提供。
【解決手段】珪素化合物を含有するバッファ層2と、バッファ層2に積層され、珪素酸化物及び/または珪素窒化物を含有するバリア層3と、を含むガスバリア膜1において、バッファ層2についてのフーリエ変換赤外吸収スペクトルにおいて、波数900cm−1での赤外吸光度A1と波数1260cm−1での赤外吸光度A2との比AR(AR=A1/A2)と、前記ガスバリア膜に含まれるバッファ層の厚みの合計t(nm)とが、AR<3未満かつ式(1)を満たすか、又はAR≧3かつ式(2)を満たす、t≦15656/AR3.313(1)t≦837/AR0.648(2)ガスバリア膜。
(もっと読む)
Hilbert位相画像処理のためのシステムと方法
【課題】細胞内で起こる高速現象を測定する装置を提供する。
【解決手段】ヒルベルト位相顕微鏡を使用し、透光性物体に関連した高解像度位相情報から、一フレーム毎の形状、体積のようなパラメータを得、ミリ秒の時間スケールで取得した多数の画像をもとに、ダイナミックな変動をナノメートルオーダーの分解能で定量化する。
(もっと読む)
計測装置、検査装置及び計測方法
【課題】高速に搬送される計測対象の物体の3次元形状計測を高精度に行う。
【解決手段】プロジェクタ2は、Y軸方向に並ぶ明暗ピッチによりコード化されたスリットパターンがX軸方向に複数配列され、Y位置が同じビットデータを各スリットパターンから抽出してX軸方向に沿って並べたときのビット列の値がY軸方向に沿って線形に変化するように各スリットパターンがコード化されたスリットパターン像を、物体Mの搬送経路上に投影する。撮像装置3は、物体MがX軸方向に搬送されスリットパターン像を通過する様子を、プロジェクタ2とは異なる角度から撮像する。コード生成部6は、撮像された動画像に基づいて、物体M上における計測対象の位置が、各スリットパターンにそれぞれ到達したときの明暗をコード化する。高さ算出部7は、コード化されたコードに基づいて、計測対象の位置の高さを算出する。
(もっと読む)
光学センサ及び画像形成装置
【課題】記録紙の種類を詳細に判別することのできる小型の光学センサを低コストで提供する。
【解決手段】第1の偏光方向の直線偏光の光を、記録媒体に照射する光照射系と、前記光照射系より照射された光のうち、前記記録媒体において正反射された光を検出する正反射光検出系と、前記光照射系より照射された光のうち、前記記録媒体において拡散反射された光を検出する前記第1の偏光方向に直交する第2の偏光方向の光を透過する光学素子を備えた拡散反射光検出系と、を有する測定系を複数有していることを特徴とする光学センサを提供することにより上記課題を解決する。
(もっと読む)
ムラ検査用画像取得装置およびムラ検査装置並びに照射部の位置決定方法
【課題】照射部の発光ムラがムラ検査用画像に与える影響を抑制する。
【解決手段】ムラ検査用画像取得装置11は、基板9が載置されるステージ2、基板9の検査表面91に向けて照明光を照射する照射部3、検査表面91にて反射した照明光を受光する撮像部41を備える。撮像部41は、ラインセンサ411および撮像光学系412を備える。ラインセンサ411の各受光素子には、ムラ検査に必要な強度の光が入射する。撮像光学系412は、物体側において非テレセントリックであり、ラインセンサ411の位置と光学的に共役な合焦位置は、検査表面91から撮像部41側にずれて位置する。ムラ検査用画像取得装置11では、照射部3と検査表面91との間の光軸J1に沿う方向における距離が100mm以上である。これにより、照射部3の発光ムラがムラ検査用画像に与える影響を抑制することができる。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 シリンドリカルレンズ59が、ガラス管Gに出射されるレーザ光をY軸線方向に集光させて、ガラス管GにX軸線方向に延びたライン状のレーザ光を照射する。Y軸方向サーボ回路119は、4分割フォトディテクタ62及びY軸方向エラー信号生成回路118によって検出されたY軸方向エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に照射されるようにガルバノミラー56を回転駆動するモータ57をサーボ制御する。また、Y軸周り角度サーボ回路122は、4分割フォトディテクタ62及びY軸周り角度エラー信号生成回路121によって検出されたY軸周り角度エラー信号を用いて、ガラス管Gに照射されるライン状のレーザ光がガラス管Gの中心軸に垂直に照射されるようにガルバノミラー54を回転駆動するモータ55をサーボ制御する。
(もっと読む)
41 - 50 / 668
[ Back to top ]