
国際特許分類[G01B7/34]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 電気的または磁気的手段の使用によって特徴づけられた測定装置 (2,440) | 表面の粗さまたは不規則性測定用 (45)
国際特許分類[G01B7/34]に分類される特許
31 - 40 / 45
検査装置及び検査方法
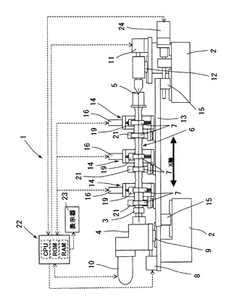
【課題】 検査の信頼性が向上し、欠陥有無判定の自動化ができ、更に、検査の高速化が可能な検査装置及び検査方法を提供する。
【解決手段】 検査対象であるカム7の回転方向周表面を検査する検査装置1は、カム7の表面3次元情報を取得するセンサを備えたセンサヘッド19を有し、センサがカム7の回転に伴いカム7面に対し常に垂直となるように、Z軸上下駆動モータ16を介しセンサヘッド19が上下動できるように構成されている。
(もっと読む)
表面情報計測装置及び表面情報計測方法

【課題】 試料を大気暴露させることなく、試料の設置から測定まで制御された環境下で試料の形状情報や物性情報を計測できる装置を提供すること。
【解決手段】 先端に微小な探針を有するカンチレバー6と、カンチレバー6を保持するためのプレート2と、試料7を設置するための試料固定台4と、筺体3などからなる気密性が保たれるロードロック室1と、カンチレバー6の変位を検出する変位検出機構8と、試料7を移動させる試料移動機構である微動機構18、XY粗動機構19、Z粗動機構20が設けられた密封容器17と、密封容器17を真空排気する真空排気機構21とガス導入機構22と、密封容器17にロードロック室1を取付けるようにした。
(もっと読む)
磁気プローブ
検査対象や要求検出精度に応じて自由に形状などの変更が可能な検出コイルを用いる磁気プローブにおいて、被検体の表面に沿う方向の磁束変化を精度良く検出できるようにする。金属成分を含む被検体2の内部及び/又は被検体2の表面空間に交流磁界を発生させながら、被検体2の表面近傍で磁束変化を検出する磁気プローブ1であって、複数の被検体近接部3aを有し、被検体2の内部及び/又は被検体2の表面空間を存して、ループ状の磁気回路を形成する強磁性体のコア3と、コア3を交流励磁し、被検体2の内部及び/又は被検体2の表面空間に、被検体2の表面に沿う交流磁界を発生させる励磁コイル4と、コイル中心線が被検体2の表面に沿い、かつ、コイル外周面が被検体2の表面に局部的に対向するように配置され、被検体2の表面近傍で磁束変化を検出する検出コイル5とを備える。  (もっと読む)
(もっと読む)
部品を検査するための装置およびシステム
【課題】最小値及び最大値を含む表面プロフィールを有する部品を検査する方法を提供する。
【解決手段】本方法(200)は、第1の位置指標を生成するように部品の表面に近接して渦電流プローブを配置する段階(202)と、第1の位置指標とは異なる第2の位置指標を生成するように部品の表面に近接して渦電流プローブを配置する段階(204)と、第1及び第2の位置指標間を補完して部品の表面の一部分のプロフィールを確定する段階(206)とを含む。
(もっと読む)
原子操作方法、原子操作装置、及び識別体形成方法
【課題】 たとえ基板が絶縁性であっても、基板表面又は該基板表面の面上の原子を操作することができる原子操作方法などを提供する。
【解決手段】 Sn原子60aの上方に探針32の先端を移動させ(図3(d))。探針32に所定の原子間力が作用するまで基板51に近づけ(図3(e))、探針32に所定の原子間力が作用した状態を維持しながら、Ge原子70aに対応する位置まで、探針32を主走査方向(横方向)に移動させる(図3(f))。そして、探針32に作用する原子間力が弱くなるように、探針32を基板51から遠ざける(図3(g))。図3(d)〜図3(g)の処理を繰り返し、探針32に所定の原子間力が作用した状態で、探針32を横方向に移動するとき(図3(e)→図3(f))に、探針32の先端とSn原子60a及びGe原子70aとの間に作用した原子間力によって、Sn原子60aとGe原子70aとの位置が交換される。
(もっと読む)
磁気センサ
【課題】 複数のコイルを有する磁気センサにおいて、測定精度を確保しつつ、測定の際に使用するコイルの配置間隔を容易に変えることができる磁気センサの提供。
【解決手段】この発明は、磁気検出部1、励磁電源2、選択回路3、差動増幅器4などを備えている。磁気検出部1は、励磁用コイル11dと、検出用コイル11a,11b,11c、11e,11f,11gとを有する。選択回路3は、欠陥検出の際に、コイル11a〜11gの一端側を選択的に接地させるスイッチ31a〜31gを備えている。また、選択回路3は、欠陥検出の際に、検出用コイルのうちから所定の2つのコイルを選択し、この選択した2つのコイルの検出信号を差動増幅器4の入力側に導くとともに、その選択されない残余のコイルについては各コイルの両端をフローティング状態で短絡させるための切り替えスイッチ32a〜32fを備えている。
(もっと読む)
非振動式接触電位プローブを使用した表面検査
材料の表面上の欠陥または汚染を特定する方法およびシステム。この方法およびシステムでは、半導体ウェハなどの材料を提供し、非振動式接触電位差センサを用いてウェハを走査し、接触電位差データを発生し、このデータを処理して、欠陥または汚染の特性を示すパターンを特定する。
 (もっと読む)
(もっと読む)
透明膜の段差の測定方法及び位相シフトマスクの作成方法
【課題】透明膜の段差の測定方法に関し、非接触、非破壊で且つ簡単な操作で高速、高精度に位相シフターの段差を測定すること。
【解決手段】第1の透明膜1の一部に形成された複数の第1の溝Sa1 ,…,San の段差量t1 ,….tn と該第1の溝Sa1 ,…,San からの反射光の偏光状態を示すパラメータの値との相関関係f1 を求めてデータベース化した後に、第2の透明膜42の一部に形成された第2の溝45の反射光の偏光状態を示すパラメータの第1の値を計測して、該第1の値と前記データベースの前記相関関係に基づいて該第2の溝45の第1の段差量を求める工程を含む。
(もっと読む)
オージェ電子検出手段を備えた走査形トンネル顕微鏡
【目的】STMにオージェ機能を組み合わせるとともに、試料から放出されるオージェ電子を十分な検出感度で検出する。
【構成】探針3の探針ホルダ20に、第1ないし第4グリッド21a〜21dががいしを介して取り付けられる。各グリッドはそれぞれ非常に微細な導電性ワイヤのメッシュから椀状に形成されており、それらの中心には探針3および探針ホルダ20が貫通している。これらのグリッドがなす立体角が大きく設定されている。第2および第3グリッド21b,21cに印加される電圧を制御してオージェ電子のエネルギをスキャンすることにより、それらの電圧に対応したエネルギを持つオージェ電子が第1ないし第4グリッド21a〜21dをそれぞれ通過して、スクリーン21e上に到達する。その場合、グリッドが試料の極近傍に接近しかつ立体角が大きいので、試料2からのオージェ電子が効率よく捕獲される。
(もっと読む)
走査型プローブ顕微鏡
【目的】水中においてACモードのAFM測定を行なえる走査型プローブ顕微鏡を提供する。
【構成】試料32は水30を入れた液体セル28の底部に配置される。カンチレバー24は自由端の探針26が試料表面に正対するように配置される。カンチレバー24は変位測定器12の対物レンズ14の軸方向に移動可能に支持されている。対物レンズ14の周囲には、発振器20から供給される信号に従って集束性の超音波を射出するリング状のトランスデューサー18が設けられている。対物レンズ14とトランスデューサー18は測定光と超音波が同一点に集束するように配置されている。液体セル28は、走査回路36の信号を受けてxy走査を行なうとともにサーボ回路38の信号を受けてzサーボ制御を行なう三次元アクチュエーター34に固定されている。
(もっと読む)
31 - 40 / 45
[ Back to top ]