
国際特許分類[G01C15/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | グループ1/00から13/00までに分類されない測量機器または付属具 (1,518)
国際特許分類[G01C15/00]の下位に属する分類
測点のマーク付のための手段 (441)
下げ振り (26)
固定角,例.直角,を設定するための器具 (1)
人工水平儀
国際特許分類[G01C15/00]に分類される特許
131 - 140 / 1,050
地山状況予測方法およびトンネル掘削方法
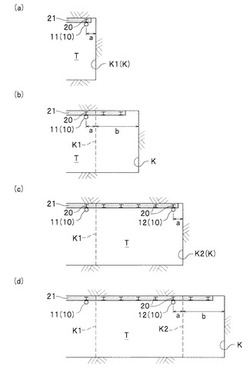
【課題】日常の施工管理として、簡易に切羽前方の地山の状況を予測しつつトンネルの掘進を行うことが可能な地山状況予測方法およびトンネル掘削方法を提案する。
【解決手段】トンネルTを第一の切羽K1まで掘り進んだ後、第一の切羽K1から距離aだけ坑口側に離れた位置のトンネル天端部に傾斜計11を設置する作業と、第一の切羽K1の前方に距離bだけ掘り進んだ後、傾斜計11によりトンネル天端部の第一傾斜角度θ1を計測する作業と、第一の切羽K1よりも前方の第二の切羽K2まで掘り進んだ後、第二の切羽K2から距離aだけ坑口側に離れた位置のトンネル天端部に傾斜計12を設置する作業と、第二の切羽K2の前方に距離bだけ掘り進んだ後、傾斜計12によりトンネル天端部の第二傾斜角度θ2を計測する作業と、を備え、第一傾斜角度θ1と第二傾斜角度θ2とを比較することにより、第二の切羽K2より前方に地山状況を予測する。
(もっと読む)
位置検出装置、方法及びプログラム

【課題】必要な計算量が少なく、信頼性の高い測定結果を得ることができる位置検出装置を提供する。
【解決手段】装置は、各ランドマーク装置との距離の履歴に基づき、新たに測定した各ランドマーク装置との距離が異常であるか否かを判定する距離異常判定手段と、各ランドマーク装置の位置情報と、各ランドマーク装置との距離に基づき、カルマン・フィルタにより現在位置を求めて出力する位置判定手段とを備えており、位置判定手段は、新たに測定した第1のランドマーク装置との距離が異常である場合、新たに測定した第1のランドマーク装置との距離から、カルマン・フィルタによる、その予測値を引いた値が大きい程、小さくなる重み係数を算出し、算出した重み係数によりカルマン・ゲインを調整し、調整後のカルマン・ゲインにより現在位置を求める。
(もっと読む)
内面形状測定装置、及び内面形状測定方法
【課題】測定装置が傾斜した場合でも、管内面を正確に測定することができる管内面形状測定装置を提供する。
【解決手段】トンネル1に沿って鉛直方向にレーザビーム2を走査させて、トンネル1内面に照射したレーザビーム2の方位毎の測距データを出力する測域センサ11と、鉛直方向に対して所定の角度θに傾けた方向にレーザビーム3を走査させて、トンネル1に照射したレーザビーム3の方位毎の測距データを出力する測域センサ12と、測域センサ11、12をトンネル1の軸方向に移動する車両5と、車両5により測域センサ11、12を移動させた時のそれぞれの位置座標を検知するエンコーダ8と、測域センサ11、12により検出された測距データに基づいて車両5と管軸との傾き角度を算出し、エンコーダ8により検知された位置座標を、算出した傾き角度に基づいて補正して管内面の三次元表面形状を生成するPC10と、を備えて構成されている。
(もっと読む)
位置計測方法、位置計測システム、及びプログラム
【課題】トータルステーションと比して簡易な装置を用いて、リアルタイムで被計測物の特徴点の位置を計測できる位置計測方法、及び位置計測システムを提供する。
【解決手段】円柱体であるターゲット30の中心位置を計測する位置計測方法であって、レーザ光をターゲット30上で走査してターゲット30上の複数の計測点までの距離を計測するLRF20から、ターゲット30上における複数の計測点の位置情報を取得するステップと、ターゲット30上における複数の計測点の位置情報と、既知情報であるターゲット30の円周面30B上の円弧部及び中心位置の情報とに基づいて、ターゲット30の中心位置を推定するステップと、を備える。
(もっと読む)
自動整準台
【課題】容易に据え置かれる物品を水平にする自動整準台を提供する。
【解決手段】
第一脚体402、第二脚体403及び第三脚体404が半球状の接地面を有することで、据え置かれる箇所を傷つけ難く、且つ安定した姿勢を容易に保持できる。また、第一脚部501、第二脚部502及び第三脚部503が水平センサ301のX軸方向及びY軸方向と一致して配置されているので、比較的簡素なアルゴリズムで自動整準処理を遂行できる。
(もっと読む)
橋梁における活荷重無載荷状態時の標高計測方法
【課題】橋梁に活荷重が作用した状態で、任意点における活荷重無載荷状態の標高を得る。
【解決手段】橋梁外に設置した自動追尾機能付きトータルステーション10により標高計測地点に設置した視準ターゲット11を所定時間の間、小時間間隔で連続的に計測し、計測時間内の最大標高値Hmax、最小標高値Hminのいずれか又は両方及び平均標高値Haveを計測し、これら計測値をたわみ影響線に基づき得られた、最大標高値Hmax、最小標高値Hminのいずれか又は両方、平均標高値Have及び定数kを用いて活荷重無載荷状態の標高H0を求める算出式、例えばH0=Have+(Hmax−Have)*kに代入して、活荷重無載荷状態の標高を求める。
(もっと読む)
ヘッドトラッキング装置及びヘッドトラッキング方法
【課題】簡単な構成で誤差の累積を抑制することができるヘッドトラッキング装置及びヘッドトラッキング方法を提供することにある。
【解決手段】頭部に装着される装着部と、装着部に配置され、角速度を検出する角速度検出器と、角速度検出器で検出した角速度の積分値に基づいて、装着部の姿勢角度を検出する姿勢検出部と、を有し、姿勢検出部は、姿勢角度が基準方向に対して角度閾値内の値であると判断したら、基準方向に対する角度偏差に基づいて角速度補正値を算出し、角速度検出器で検出した角速度を前記角速度補正値で補正する角速度補正処理を行い、前記姿勢角度を基準方向に収束させることで、上記課題を解決する。
(もっと読む)
地形データの取得方法
【課題】レーザレーダを用いて監視領域の物体を検知するのに用いる監視領域の地形データを、監視領域が広い場合であっても精度よく取得できるようにすること。
【解決手段】侵入物体Sが存在しない状態で監視領域Aの地面Lを、表面に高反射率の反射材をコーティングした反射シートRで覆い、その状態で走査光により監視領域Aの地面Lを走査して、反射シートRの表面からの反射光を受光する。これにより、地面Lを直接走査光で走査する場合に比べて反射光の受光強度を高くする。よって、走査光の入射が浅くなって反射光の強度が微弱となる遠方の監視領域Aについても、反射率のよい反射シートRからの反射光に基づいて、監視領域Aの地面Lの地形データを精度よく取得することができる。
(もっと読む)
トータルステーション用ターゲット及びそれを用いた建設用作業機械の制御方法
【課題】傾きを考慮した精度の高い水平座標位置データを求めることが可能なトータルステーション用ターゲットを提供する。
【解決手段】本発明のトータルステーション用ターゲット100は、トータルステーションから射出されるレーザー光を反射する光学部110と、光学部110と間の相対位置が変化することがないように固定されると共に、水平面内における第1の軸の周りの傾きを検出する第1傾斜センサ121と、前記光学部と間の相対位置が変化することがないように固定されると共に、水平面内における前記第1の軸と直交する第2の軸の周りの傾きを検出する第2傾斜センサ122と、前記第1傾斜センサ121によって検出された第1検出情報と、前記第2傾斜センサ122によって検出された第2検出情報とを出力する出力部123と、を有することを特徴とする。
(もっと読む)
位置計測システム、位置計測方法
【課題】被計測点が計測点から不可視であったり、被計測点と計測点との距離が長い場合であっても、計測点から土留壁等に設けられた被計測点の位置ひいては変位を正確に計測可能な位置計測システム等を提供する。
【解決手段】測定器S1が設けられる計測点P1から所定の被計測点O3へと至る経路上で、計測点P1の次に計測点P2を配置し、測定器S2を設ける。測定器S1は計測点P1を基準とする次の計測点P2の位置を測定し、計測点P2の測定器S2は、計測点P2を基準とする被計測点O3の位置を測定する。PC2は、これらの測定結果に基づき、計測点P1の位置を基準とする被計測点O3の位置またはその変化を算出する。
(もっと読む)
131 - 140 / 1,050
[ Back to top ]