
国際特許分類[G01C21/30]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 航行;グループ1/00から19/00に分類されない航行装置 (14,361) | 道路網における航行に特に適合したもの (3,173) | 航行計器からのデータを修正するもの (361) | マップマッチングまたは等高線との一致 (86)
国際特許分類[G01C21/30]の下位に属する分類
地図のデータの構造または書式 (12)
国際特許分類[G01C21/30]に分類される特許
31 - 40 / 74
車両位置特定装置、車両位置特定方法、及び車両位置特定プログラム
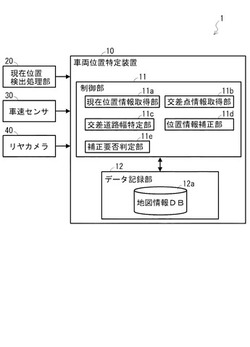
【課題】車両の現在位置を示す現在位置情報の精度を向上できる場合にのみ当該現在位置情報の補正を行うことができる、車両位置特定装置を提供すること。
【解決手段】車両位置特定装置10は、現在位置情報を取得する現在位置情報取得部11aと、交差点の代表座標を含む交差点情報を取得する交差点情報取得部11bと、交差道路の幅を特定する交差道路幅特定部11cと、交差道路の幅と、当該交差道路が交差する交差点についての交差点情報とに基づき、現在位置情報を補正する位置情報補正部11dと、前回補正が行われた交差点における交差道路の幅と、車両が今回通過した交差点における交差道路の幅と、前回補正が行われた交差点から車両が今回通過した交差点までの走行距離とに基づき、車両が今回通過した交差点において位置情報補正部11dに補正を行わせるか否かを判定する補正要否判定部11eとを備える。
(もっと読む)
走行道路推定装置、方法およびプログラム

【課題】走行道路の誤推定が発生し得る交差点に広く適用可能であるとともに、誤推定の発生を抑制することが可能な技術の提供。
【解決手段】車両の走行軌跡と地図情報が示す道路の形状との一致度に基づいて前記車両が走行する走行道路を推定する走行道路推定装置において、第1退出道路と第2退出道路とが接続された交差点であるとともに、前記地図情報が示す前記第1退出道路と前記第2退出道路との関係が所定の関係である対象交差点が、前記車両の前方の所定範囲内に存在すると判定された場合、前記地図情報が示す前記第1退出道路の形状よりも当該第1退出道路に前記車両が退出する場合の前記走行軌跡に近い形状の仮想道路を生成し、 前記仮想道路の形状および前記地図情報が示す前記第2退出道路の形状のそれぞれと、前記車両の走行軌跡との一致度に基づいて前記車両が走行する前記走行道路を推定する。
(もっと読む)
移動経路推定方法、端末装置、サーバ及びプログラム
【課題】移動経路推定方法、端末装置、サーバ及びプログラムにおいて、GPS機能を利用できない場合、或いは、GPS機能を利用しても正確な絶対位置が得られない場合でも自律測位を用いる携帯端末装置の位置推定精度を向上する。
【解決手段】端末装置の直線移動距離を組み合わせたリンクに関するリンク情報を取得し、リンク上の任意の位置で端末装置の絶対位置に依存するメタ情報を取得し、端末装置が位置するエリアに対応するトポロジーデータを取得し、メタ情報から推定した絶対位置から所定距離内の範囲のエリアに対応するトポロジーデータとリンク情報とを比較して類似度が閾値以上で最大のトポロジーリンクを取得して推定移動経路のデータとして出力するマッチング処理を行うように構成する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、およびプログラム
【課題】施設を退出後の現在位置検出精度を向上可能なナビゲーション装置、ナビゲーション方法、およびプログラムを提供する。
【解決手段】補正情報DB94には、プローブカー102が施設内を走行したときに補正情報作成車両走行軌跡と、施設を退出したときの位置情報を補正するための補正情報とが関連づけて記憶されている。制御部91では、サービス対象車両2が施設に進入してから施設内を走行した走行軌跡を受信し、受信した走行軌跡と一致する補正情報作成車両走行軌跡があると判断された場合、受信した走行軌跡と一致する補正情報作成車両走行軌跡と関連づけられている補正情報をサービス対象車両2の車載器1に送信する。これにより、プローブカー102が施設を退出したときに現在位置を補正された補正情報を用い、適切に現在位置を補正することができるので、施設退出後の現在位置検出精度を向上することができる。
(もっと読む)
移動体位置測定装置
【課題】車載カメラを利用した実時間測位の技術に係わり、安価かつ高精度な測位を実現できる技術を提供する。
【解決手段】本自動車及び車載情報システム100の実時間測位部1は、車載のカメラ4から参照地点付近で撮影された複数の実画像を入力し、その中から特徴部を抽出して第1の特徴情報(c1)とする第1の特徴抽出部11と、地図DB5から対応する第2の特徴情報(c2)を読み出して取得する第2の特徴抽出部12と、第1、第2の特徴情報を入力して特徴部を比較してマッチングすることにより、各特徴部の位置を推定し、当該位置をもとに、SFM手法を用いて、移動に伴う各時点の自車の位置と上記各特徴部の位置との相対的な位置関係を演算することにより、自車現在位置を推定して第2の位置情報(L2)として出力する特徴マッチング部13と、を有する。
(もっと読む)
車載用電子機器及びプログラム
【課題】 トンネル内で道路の分岐がある場合であっても、現在位置を適切に求めること
【解決手段】 データベース19には、トンネル内の道路位置を特定する道路位置情報と、そのトンネル内の分岐点の位置に関する分岐点情報を記憶する。制御部18は、車両から取得する車速情報と経過時間から車両の走行距離を求め、求めた走行距離と道路位置情報に基づき車両の現在位置を求める現在位置算出機能、車両から取得するウインカーのON情報から車両の進路変更の方向を検出する進路変更検出機能、その進路変更検出機能が車両の進路変更の方向を検出し、現在位置算機能が求めた現在位置と分岐点情報で特定される位置が設定距離より近い場合に、その進路変更は分岐点での進路変更と判定する判定機能を備える。現在位置算出機能は、判定機能が分岐点での進路変更と判定した場合、車両がその分岐点で進路変更検出機能が検出した方向に走行するとして現在位置を求める。
(もっと読む)
道路ノード位置管理システム
【課題】道路情報から読み出される合流・退出ノードの位置と、実際に合流・退出走行が開始される地点とのずれを起因とする各種処理における不都合を低減する。
【解決手段】道路情報中における合流・退出リンクと本線リンクとの交点としての合流・退出ノードの通過後の所定区間内で実行される可能性がある運転制御処理の情報、当該合流・退出ノードにおける前記車両の走行履歴、当該合流・退出ノードの形状的特性、の少なくとも1つを含む車両運転条件を取得し、車両運転条件に基づいて車両の経路案内処理に適した位置に合流・退出ノードを補正する第1補正処理と、マップマッチング処理に適した位置に合流・退出ノードを補正する第2補正処理とのいずれかが選択される。
(もっと読む)
移動端末、システム及び方法
【課題】自律航法機能を有する移動端末における進行方向の推定誤差の蓄積を解消するため、地図情報を利用することにより進行方向を補正する。
【解決手段】目的地までのルート上に移動端末の現在位置をマップマッチングする地図アプリケーション部と、当該移動端末の動きを検知し、歩数及び進行方向を示すセンサ情報の測定部と、当該移動端末の現在位置を決定する位置算出部と、ユーザの進行方向の変化量が所定の期間に所定の範囲内にあるか判断することによって直進歩行状態にあると推定した場合、前記ルート上の前記直進歩行状態にある直進部分の方位により前記ユーザの進行方向を補正する進行方向補正部と、前記補正された進行方向と、前記直進歩行状態の開始時点及び開始地点とに基づき、当該移動端末の現在位置を前記開始地点から再計算し、該再計算された現在位置により当該移動端末の現在位置を補正する現在位置補正部とを有する。
(もっと読む)
カーナビゲーション装置
【課題】自車位置の算出精度を向上できるカーナビゲーション装置を提供する。
【解決手段】カーナビゲーション装置は、自車両の位置(自車位置)を検出する自車位置検出手段と、自車両と対象物との距離を外部から受信する距離情報受信手段と、道路地図データに基づいて対象物の位置を推定する対象物位置推定手段と、距離情報受信手段で受信した距離と、対象物位置推定手段で推定した対象物の位置とに基づいて、自車位置検出手段で検出した自車位置を補正する自車位置補正手段とを備えることを特徴とする。
(もっと読む)
デジタル地図の位置情報伝達方法と装置
【課題】道路形状が複雑な場合でも、少ないデータ量で正確にデジタル地図上の位置や形状を伝達することができる位置情報伝達方法を提供する。
【解決手段】送信側が、デジタル地図上の対象道路区間を指定する道路形状情報と、事象発生位置を対象道路区間内の相対位置で指定する事象情報とを伝達し、受信側が、道路形状情報を基にマップマッチングでデジタル地図上の対象道路区間を同定し、事象情報に基づいて対象道路区間内の事象発生位置を特定する位置情報伝達方法において、送信側は、対象道路区間に含まれるノードを間欠的に選出(2)して、当該ノードの座標データを道路形状情報に含めて伝達し、受信側は、マップマッチングで道路形状情報に含まれるノード位置を決定し(4)、このノード間の道路を経路探索で求めて(5)、対象道路区間を同定する。少ないデータ量で、効率的且つ正確にデジタル地図の事象位置を伝達することができる。
(もっと読む)
31 - 40 / 74
[ Back to top ]