
国際特許分類[G01L5/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 力,応力,トルク,仕事,機械的動力,機械的効率,または流体圧力の測定 (8,098) | 特定の目的に適合した,力,例.衝撃によるもの,仕事,機械的動力またはトルクを測定する装置または方法 (2,038) | 力の複数分力を測定するもの (304)
国際特許分類[G01L5/16]に分類される特許
71 - 80 / 304
触覚センサユニット
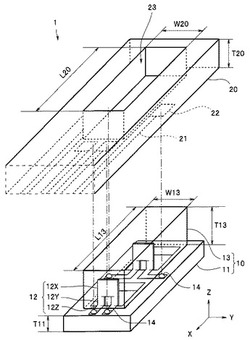
【課題】小型の触覚センサユニット1を提供する
【解決手段】触覚センサユニット1は、変形を検出するピエゾ抵抗層11Wが形成されたカンチレバー12を有する半導体基板11とカンチレバー12を内部に埋め込んだ弾性体13とピエゾ抵抗層11Wと接続されたバンプ14とを有するセンサチップ10と、接続パッド22と接続された配線層21とを有する配線板20と、を具備し、バンプ14と接続パッド22とを介して、センサチップ10が配線板20にフリップチップ実装されている。
(もっと読む)
タイヤ試験機に用いられる多分力計測スピンドルユニットの校正方法

【課題】スピンドル軸芯方向に沿って離れた位置に2つの多分力計測センサを備えた多分力計測スピンドルユニットにおいて、タイヤに作用する実荷重を求める際に用いる変換行列を確実に校正することができ、校正された変換行列を用いることで、タイヤに発生する並進荷重およびモーメントを精度よく算出する。
【解決手段】本発明に係る多分力計測スピンドルユニット1の校正方法は、スピンドル軸4に作用する荷重を計測する「計測工程」と、この計測工程で得られた計測荷重ベクトルとこの計測荷重ベクトルに作用する変換行列Eとを用いて、タイヤTに働く実荷重ベクトルを求める「算出工程」と、この算出工程に先立って、複数の一次独立な試験条件の基で計測荷重ベクトルを計測し且つ得られた計測荷重ベクトルを基に変換行列Eを校正する「校正工程」を有している。
(もっと読む)
入力物理量推定方法、推定装置並びに推定プログラム
【課題】系への入力と系からの出力とがどちらも多変数(多元・多次元の物理量)である場合に系からの出力に基づいて前記系への入力を推定することができるようにする。
【解決手段】第一近似係数を算定する処理と、推定入力物理量を算出する処理と、推定入力物理量の有効判定を行う処理と、推定入力物理量の決定を行う処理と、推定出力物理量を算出する処理と、残差を算出する処理と、残差と増減表との比較を行う処理と、次推定入力物理量成分を決定する処理と、打ち切り判定を行う処理とを有するようにした。
(もっと読む)
検出装置、電子機器、及びロボット
【課題】外圧の方向と大きさとを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する単位突起24が形成された第2基板20と、を備え、単位突起24が、硬度の高い弾性体突起22と、硬度の低い弾性体層23と、からなる。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の有無を高速に検出し、かつ外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供すること。
【解決手段】検出装置は、基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する弾性体突起22が形成された第2基板20と、を備えた検出部1と、複数の圧力センサー12のうちの一部により検出された圧力値から外圧の有無を検出する検出動作を行い、その検出結果から検出部1の次の検出動作を制御する制御部と、を備える。
(もっと読む)
センサ装置及びロボット装置
【課題】検出部から出力される原検出信号から可撓体の振動に起因するノイズ成分を良好に除去し、フィルタ処理により得られる検出信号の位相の遅れを抑制する。
【解決手段】検出部101は、被測定対象の状態により変形する可撓体と、可撓体の変形量を検出し、検出結果を示す原検出信号102を出力するセンサとを有する。フィルタ部103は、フィルタ係数を用いて原検出信号102をフィルタ処理して得られる検出信号107を出力する。演算装置104は、原検出信号102に含まれる可撓体の振動数を演算により求める。変更部106は、フィルタ部103のフィルタ係数を変更して、フィルタ部103を、演算装置104により演算された振動数fを減衰させるフィルタとして機能させる。
(もっと読む)
センサ装置および分布測定装置
【課題】せん断応力及び接触圧力の直接同時測定に際し、生体へ適用可能で且つ接触圧力による影響を排除したせん断応力の測定ができるセンサ装置70を提供する。
【解決手段】圧力変換素子50はポリピロール薄膜を用い、電極材は銅張ポリイミドフィルムを用いた。せん断応力測定部30は片面側電極10における櫛型電極11aと対面側電極20における櫛形電極21aとの櫛部分を揃わせて対面させ、両電極の間に圧力変換素子50を挟み込む。接触圧力測定部40は片面側電極10における方形電極12aと対面側電極20における櫛形電極21cとを対面させ、両電極の間に圧力変換素子50を挟み込む。4ゲージ法ブリッジ回路60の抵抗変化量の関係に基づき、せん断応力測定部30等における抵抗変化量ΔRaから接触圧力の影響による抵抗変化量ΔRbを差し引きした出力を得ることにより、接触圧力による影響を排除したせん断応力の測定を行う。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された第1容量電極12、を有する第1基板10と、第1容量電極12を挟んで第1基板10と対向配置された第2基板20と、第1基板10と第2基板20との間において誘電体を挟んで第1容量電極12と対向配置された第2容量電極22と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第2基板20に当接した状態で弾性変形する弾性体突起32、が形成された第3基板30と、を備える。
(もっと読む)
力覚または運動センサ
【課題】感度及び信頼性が高く、構造がより簡単で製造コストの安価な力覚または運動センサを提供する。
【解決手段】本発明による力覚または運動センサにおいては、センサを保持し固定するためのベース1と、6自由度方向の応力に感応するよう構成され前記ベースと対向して配置されたテーブル30と、前記ベースと前記テーブルとの間に配置され前記応力に対応して動作する動作部と、前記動作部の変位及び/または変形を検出する複数の検出素子と、前記各々の検出素子の変位及び/または変形量を総合的に計算する演算部とからなるセンサにおいて、前記動作部は放射状に配置された複数の感応アーム10と、これらアームと一体化されたアームより厚いボス部25とからなる。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外圧の方向と大きさを高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された圧力センサー12を有する第1基板10と、基準点Pと重なる位置に重心が位置するとともに外圧によって先端部が第1基板10に当接した状態で弾性変形する弾性体突起22、が形成された第2基板20と、を備える。
(もっと読む)
71 - 80 / 304
[ Back to top ]