
国際特許分類[G01L5/16]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 力,応力,トルク,仕事,機械的動力,機械的効率,または流体圧力の測定 (8,098) | 特定の目的に適合した,力,例.衝撃によるもの,仕事,機械的動力またはトルクを測定する装置または方法 (2,038) | 力の複数分力を測定するもの (304)
国際特許分類[G01L5/16]に分類される特許
81 - 90 / 304
球体移動経路の測定方法
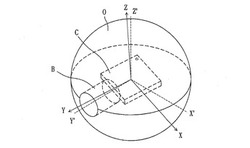
【課題】球体の実際の移動状態に近いデータを獲得可能な球体移動経路の測定方法を提供する。
【解決手段】操作ユニットおよび三軸加速度計Cを用意し、三軸加速度計Cと操作ユニットとを接続させ、三軸加速度計Cで測定したデータを操作ユニットに伝送し、測定対象物Oの内部に三軸加速度計Cを置き、三軸加速度計CでXYZ三軸の空間座標を定義し、第一測定時点に三軸の初期位置を確認し、第二測定時点に比較位置を確認し、データを操作ユニットに伝送する。XYZ三軸のそれぞれの比較位置と初期位置との間の角度を比較し、XYZ三軸の軸方向上の力を受けた後の加速度データと、それぞれ軸方向の分力のベクトルと、それぞれ軸に対する旋転力とを算出する。三つの軸方向の加速度値と、測定対象物Oの重量およびサイズとに基づいて、測定対象物Oの初期速度、飛行時間、飛行高度、飛行距離および旋転速度のうちの少なくとも一つのデータを求める。
(もっと読む)
力検知ユニット、圧電基板の製造方法及び加速度センサ

【課題】製造が容易で、小型で且つ薄型の精度の良い力検知ユニットを得る。
【解決手段】一方の主面の略中央部に凹陥部を形成することにより形成した薄肉部を有すると共に両端部に厚肉部を有した圧電基板と、前記圧電基板の他方の主面上の両端部寄りに少なくとも夫々一個ずつ形成したIDT電極と、を有した力感応素子と、前記力感応素子の前記一方の厚肉部の一方の主面側を接着剤により接着保持する、支持基板と、を備えた力検知ユニットであって、前記接着剤の厚みを利用して前記圧電基板の他方の厚肉部を前記支持基板上から離間させた片持ち支持とする。
(もっと読む)
センサー素子アレイ及びその製造方法
【課題】複数方向に感度を有するセンサー素子アレイを安価に提供する。
【解決手段】センサー素子アレイは、第1のセンサー素子及び第2のセンサー素子と、第1のセンサー素子及び第2のセンサー素子が配置されたシート基板と、を具備し、シート基板には切れ込みが形成されており、該切れ込みの隙間が広げられていて、シート基板のうち、第1のセンサー素子が配置された箇所における基板面と、第2のセンサー素子が配置された箇所における基板面とが、交差する角度に形成されている。
(もっと読む)
力覚センサの校正方法
【課題】エンドエフェクタを交換せずに、力覚センサをアームの先端に装着したままで校正できる簡易な力覚センサの校正方法を提供すること。
【解決手段】一方のロボット101の力覚センサ1が校正済みで、他方のロボット102の力覚センサ2が校正対象である。まず、一対のロボット101,102のハンド3a,3b同士を当接させる(当接工程)。当接工程の実行による一方のロボット101の校正済みの力覚センサ1の検出信号を力又はモーメントを示す測定値に変換する(測定工程)。測定工程で得られた測定値に基づき、当接工程により反作用によって他方のロボット102のハンド3bに作用している力又はモーメントを示す値を求める(算出工程)。当接工程で他方のロボット102の校正対象である力覚センサ2が出力した検出信号が、算出工程で得られた力又はモーメントを示す値と同一の値に変換されるように、変換データを更新する(校正工程)。
(もっと読む)
ピエゾ抵抗素子内蔵センサチップの製造方法及びそのセンサチップ
【課題】容易かつ低コストの製造が実現でき、また小型化、薄型化を促進する。
【解決手段】インターポーザ1上において、その凹部にIC2を接続すると同時に、ピエゾ抵抗素子が上面略中央に配置された複数のセンサ部4を接続し、この複数のセンサ部4のそれぞれに対し、ピエゾ抵抗素子に圧縮及び引張り応力を生じさせるための伝達体5とこの伝達体5の上面よりも面積の大きい外力受け板6を配置する。その後、上記外力受け板6とセンサ部4及び集合基板1との間に、固定/緩衝用樹脂7を充填し、最後に集合基板体8を個片化して複数のセンサチップ10を製作する。上記樹脂7は、外力受け板6をセンサ部4と集合基板1に対して固定して、センサチップ10を一体化させると共に、その弾性力により外力受け板6で受けた外力を吸収し弱める緩衝の役目をする。
(もっと読む)
3次元ロードセル
【課題】荷重の測定精度を向上して実用性が高い3次元ロードセルを提供する。
【解決手段】基部12と、基部12との間に間隙Gをあけて支持された荷重受部14と、一端を基部12に固定し他端を荷重受部14に固定して荷重受部14を基部12に支持させ、荷重受部14が荷重を受けた際に歪みを生じる複数の起歪部であり、任意の第1方向と、第1方向に交差する第2方向と、第1方向と第2方向を含む平面に交差する第3方向と、の3つの方向に向けて基部14と荷重受部14との間に渡架状に設けられた第1、第2、第3起歪部161、162、163と、第1、第2、第3起歪部にそれぞれ取り付けられたひずみゲージと、を含むことを特徴とする3次元ロードセル10から構成される。
(もっと読む)
車軸6分力計角度検出器の支持機構
【課題】 スリップリングに組み込まれた角度検出器を車体との間で基準座標系を保持し、転舵による角度変化に対する誤差を無くし、精度の向上を図る。
【解決手段】 車軸6分力計7は、ハブアダプタ5を介して、ホイールハブ4とホイール6との間に配設され、車輪から加わる外力を受けて、X、Y、Z軸方向の分力および各軸回りのモーメントに対応する信号を出力する。スリップリングの支持機構9は、X軸方向に平行移動する第1、第2の平行四辺形リンク10、12、これらをY軸方向に移動可能とする第1、第2の回転ジョイント11、13、第2の回転ジョイント13とスリップリング8との間のZ軸を中心とした相対回動を可能とする第3の回転ジョイント14からなっている。
(もっと読む)
力覚センサ
【課題】力覚センサの検出精度を向上する。
【解決手段】連結部10は、テーブル3の可動を受ける軸受け部6と、軸受け部6の可動を受ける軸受け部7と、一端が軸受け部6と接続され、他端が軸受け部7と接続されたロッド4と、一端が軸受け部7と接続され、他端がベース2と固定されたアーム5とを有している。アーム5は、ベース2、テーブル3およびロッド4より弾性が高いものである。力覚センサ1は、複数の連結部10のアーム5のそれぞれに対して、アーム5の変形を一方向で検出する複数の検出素子9と、複数の検出素子9の検出値からキャリブレーションを行ってテーブル3に作用する6成分を計算する演算部を含む回路基板11とを備えている。
(もっと読む)
外力検出インタフェースの故障検知方法
【課題】エンドエフェクタを力覚センサで可動体に固定した外力検出インタフェースの力覚センサの故障を検出する方法を提供する。
【解決手段】剛性を有するエンドエフェクタ10が力覚センサ25、26によって可動体30に拘束され、エンドエフェクタ10に作用する外力が力覚センサ25、26の応答値から算出される外力検出インタフェースの力覚センサの故障検出方法であって、応答チャンネルの数が冗長性を有する力覚センサ25、26でエンドエフェクタ10を可動体30に拘束し、正常な力覚センサの応答値ベクトルが取り得る超平面に外力検出時の力覚センサ25、26の応答値ベクトルを拘束したときの超平面上の理論値と、当該応答値ベクトルとの偏差を求め、この偏差の大きさに基づいて、誤った応答値を応答する力覚センサのチャンネルを特定する。また、誤差を含むセンサ応答値から正しい外力を推定することもできる。
(もっと読む)
3軸力センサパネル
【課題】パネル上の押した位置を検出すると共に、パネル自体がベース板に対してねじれる方向を検出可能な3軸力センサパネルを提供する。
【解決手段】ベース板30と、これと対向配置されるスイッチパネル40と、ベース板とスイッチパネルを繋ぐ3つ以上の連結体100と、連結体の少なくとも3つにそれぞれ設けられ、パネル面と直交するZ方向に作用する力に基づく応力を検出すると共にZ方向廻りにパネルがねじれる際の応力を検出するようになった力センサ200を有し、各力センサは、スイッチパネルの面上の押した位置に応じて、出力が変化するようになっており、この出力の組合せからパネル面上の押した位置の検出ができると共に、各力センサからパネルのベース面に対するねじれ方向を検出できるようになっている。
(もっと読む)
81 - 90 / 304
[ Back to top ]