
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
151 - 160 / 276
物体検出装置
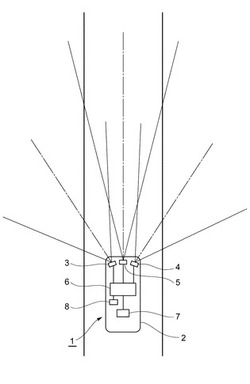
【課題】追尾範囲を適切に設定して物体の検出精度の向上が図れる物体検出装置を提供すること。
【解決手段】物体検知を行うレーダ3〜5を備えて構成され、レーダ3〜5により検知された物体の追尾範囲を物体が検知される方向に応じて設定する。これにより、物体の移動状態に応じて追尾範囲の向きを設定することが可能となる。このため、物体の移動状態に適した追尾範囲を設定でき、物体のロストなどを低減でき、適切なトラッキングが行える。従って、物体の検出精度を高めることができる。
(もっと読む)
目標信号検出装置及び目標信号検出方法

【課題】目標の位置を予測する閾値を制御することにより、目標を安定して検出することができる目標信号検出装置を得ることにある。
【解決手段】送受波器は、水中に音波を発信し、目標からの反響音を受信処理する。信号処理部は、受信信号が有する複数の要素を抽出し、抽出した特徴素を複数の時系列信号として出力する。信号検出部は、時系列信号の目標らしき信号を抽出し、特徴素を算出する。目標検出部は、時系列信号ごとに目標信号を統合して位置を算出する。目標類別部は、統合された各特徴素に対して重み付けを行い、統合された目標信号の目標らしさの程度を示す確信度を算出する。目標追尾部は、目標の予測位置を算出し、実際に検出した目標との相関を実施する。目標検出最適化処理部は、目標の予測位置を利用し、信号検出部を最適化する。
(もっと読む)
移動物体検出装置および自律移動物体
【課題】混雑環境下での移動物体の精度よいトラッキングが行える移動物体検出装置および移動ロボットを提供すること。
【解決手段】空間の混雑度を測定してトラッキングに利用するもので、方向成分では、混雑度が低ければレーザレンジセンサの計測値を重視し、混雑度が高くなると画像処理結果を重視したセンサフュージョンを行い、得られた移動物体推定方向に対してレーザレンジセンサの計測結果から距離を求める。
(もっと読む)
信号分離装置
【課題】分離信号の対応付けの正解率を改善することのできる信号分離装置を得る。
【解決手段】複数の源信号が混信した複数の時系列観測信号を受信し、それぞれをある時間長を有するブロックごとに分割するブロック分割部20aと、ブロック分割部20aで分割された複数の観測信号に独立成分分析を適用して分離処理を行うことにより複数の分離信号および混合行列推定値を抽出する独立成分分析部30と、抽出結果に基づいて、現ブロックから抽出された複数の分離信号と、前ブロックから抽出された複数の分離信号との対応付けを行う相関処理部70aと、それぞれの分離信号を連接し、複数の源信号に相当する連接信号を生成する連接処理部40とを備え、ブロック分割部20aは、時系列の観測信号をブロックごとに分割する際に、前後のブロックを時間的に一部重複させて分割する。
(もっと読む)
追尾装置
【課題】追尾の初期段階から予測誤差を少なくして、安定した目標の追尾を行う。
【解決手段】新たに観測された目標に対して使用するフィルタゲインの初期値を設定する初期化ゲイン設定部6と、観測値に基づく目標の追尾が初期段階である場合に、観測値に基づき目標が到達すると予測される位置を示す第1予測値を算出するとともに、観測値に基づき第1平滑値を算出し、第1平滑値を含む相関のある目標に対する航跡情報を生成する初期化処理部4aと、観測値に基づく目標の追尾が初期段階でない場合に、目標の過去の航跡情報に基づき目標が到達すると予測される位置を示す第2予測値を算出するとともに、第1予測値又は第2予測値と観測値とに基づき第2平滑値を算出し、第2平滑値を含む相関のある目標に対する航跡情報を生成するフィルタリング処理部3と、第1予測値又は第2予測値と観測値とに基づき目標の相関を判断する相関処理部1とを備える。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】レーダ装置はできるだけ多くの信号を、できるだけ短時間での処理が要求され、信号の要求精度を落とさずに高精度の高分解能処理の削減で負荷を削減する。
【解決手段】目標物からの反射波をアンテナで受信してA/D変換部でディジタル化し、時間フーリエ変換部でドップラー周波数次元に変換して目標物の相対速度を算出し、ドップラー周波数次元の信号に対しピーク検出部で受信レベルのピーク検出を行い距離ゲートまたは相対速度情報から信号の重要度を重要度判定部で判定して、データ並び替え部で重要度順に並び替え、この各信号と重要度を、異なる複数の高分解能処理方法における演算精度および所定数の信号の処理時間を処理方法との組合せ毎に格納されたデータベースと照合し、各信号と高分解能処理方法とをデータ割当て部で対応させ、高分解能処理部で角度または距離を算出する。
(もっと読む)
標定レーダ装置
【課題】位置標定に対する精度を維持しつつ、より広い範囲を監視して目標の位置標定を行なうことのできる標定レーダ装置を得る。
【解決手段】監視対象領域を低仰角の初期探知領域と高仰角の進路観測領域に分割し、初期探知領域に目標探知のためのビーム幕を形成しておき、この領域で探知した目標については、その捕捉情報を取得するとともに、進路観測領域に進入後の進路を予測する。そして、この目標が進路観測領域に進入後は、予測した進路の方向に指向させたレーダビームにより目標の捕捉情報を継続して取得し、その後、これら一連の捕捉情報に基づいて目標の発射位置の標定を行なう。
(もっと読む)
状態推定装置及び状態推定方法
【課題】推定処理の途中で、必要なモデルを判別して、不要なモデルのカルマンフィルタの処理結果がフィルタ全体の推定精度に与える悪影響を抑制することができるようにする。
【解決手段】統合処理部10がカルマンフィルタ処理部3−1〜3−3から出力された各モデルの状態ベクトル推定値の更新値xk|k(j)ハット及び推定誤差共分散行列の更新値Pk|k(j)のうち、モデル構成判定部8により使用すると判別されたモデルの状態ベクトル推定値の更新値xk|k(j)ハット及び推定誤差共分散行列の更新値Pk|k(j)を、モデル確率計算部6により計算されたモデル確率μk(j)に応じた統合加重で統合する。
(もっと読む)
船舶用目標追尾装置
【課題】自船の方位データに異常が発生しているか否かを知ることができる船舶用目標追尾装置を提供する。
【解決手段】Association判定部3は、目標追尾部2から出力された目標船のデータ(レーダ追尾目標データ)と、AIS処理部4から出力された他船のデータ(AIS目標データ)とを比較し、同一目標船と判定されたデータを分散判定部5へ出力する。分散判定部5は、レーダ追尾目標データに含まれる目標船の方位データと、AIS目標データに含まれる目標船の方位データとの差に基づく指標値を計算し、その指標値に基づいて、レーダ追尾目標データに含まれる方位データに異常が発生しているか否かを判定する。
(もっと読む)
目標観測レーダ装置及び目標追尾方法
【課題】平行移動による観測予報値の補正に代わる補正方式を提供する。
【解決手段】観測した目標物の軌道データに基づいて観測予報値を作成する観測計画作成処理部と、前記観測計画作成処理部からの前記観測予報値に基づいて、目標物を観測した軌道データに含まれるデータ誤差と、目標物固有の軌道の不安定要素とを含んだ誤差値を考慮した2以上の軌道モデルを求め、前記目標物を初期捕捉した観測データに近似した軌道データを前記軌道データから抽出し、前記抽出した軌道データの観測予報値を目標物の追尾観測データとして出力する観測実行計画処理部と、を有する。
(もっと読む)
151 - 160 / 276
[ Back to top ]