
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
171 - 180 / 276
目標相関統合処理装置
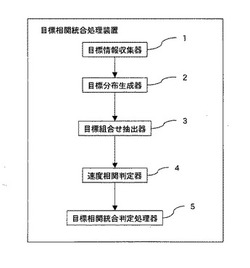
【課題】 指揮統制するシステムにて、目標相関を統合処理する際、その処理対象は各情報源から収集した目標情報に対し、全目標の組合せとなる。従って、目標の増加による組合せ数の増大は複雑な計算を要する目標相関統合処理の処理負荷に影響を与えていた。
【解決手段】 指揮統制システムに接続し、指揮統制対象となる目標の情報源から目標情報を収集し、蓄積する目標情報収集器、目標情報収集器によって蓄積された目標情報より各目標情報を取得し、分布情報を生成する目標分布生成器、目標分布生成器によって生成された分布情報を取得し、その情報から各目標の速度相関判定器の対象目標組となる組合せを決定する目標組合せ抽出器、目標組合せ抽出器によって抽出された目標の組合せに対して、速度相関判定を実施する速度相関判定器により、総合的に相関の有無を判定する目標相関統合判定処理器の対象となる目標組合せを絞り込み、処理負荷を軽減する。
(もっと読む)
信号処理装置およびその方法

【課題】ESPRITによる信号処理だけで複数の候補値を算出しこれらから推定値を得ることで推定値の信頼性を高めた信号処理装置および方法を提供する。
【解決手段】所望のパラメータに関し、アレー状の複数の受信素子の各受信素子から得られる受信信号に対してESPRITによる信号処理により、共分散行列を演算し、算出された共分散行列を固定値と固有ベクトルに展開し、固有ベクトルに選択行列対を適用して得られた2つの行列の関係を最小二乗法で解き、最小二乗法の解から所望のパラメータの推定値の候補値を算出して出力する信号処理において、複数のサブアレー選択方法によりそれぞれに、固有ベクトルの複数の要素を各選択方法で異なるサブアレーに分割し、複数のサブアレー選択方法毎にそれぞれESPRITによる信号処理で所望のパラメータの推定値の候補値を算出し、算出された複数の候補値を組み合わせて推定値を判定する。
(もっと読む)
多センサ処理
多センサ処理の方法は、第1のセンサシステムにおいて、第2のセンサシステムからトラックデータを受信すること、第1のセンサシステムからのトラックデータを第2のセンサシステムからのトラックデータと比較することであって、或る時間期間の間にトラックが第1のセンサシステムの視野内に存在することになるか否かを判断する、比較すること、第1のセンサシステムにおいて、トラックデータに基づいてトラックの予測品質を求めること、及び、当該トラックの予測品質をブロードキャストすることを含む。本方法は、第2のセンサシステムからトラックの予測品質を受信すること、並びに、第1のセンサシステムによって求められたトラックの予測品質、及び第2のセンサシステムから受信されたトラックの予測品質に基づいて第1のタスクのセットを決定することも含む。 (もっと読む)
目標類別装置
【課題】送信信号を、高距離分解能送信した場合、高ドップラ分解能送信した場合、および、高PRF送信した場合に得られる各処理結果、並びに、追尾処理により得られる航跡情報から得られる処理結果の全てが揃うまで待たずに、出力されるタイミングが早い結果から順に用いて目標を類別することにより、無駄な待ち時間の発生を防ぎ、迅速に類別結果を得ることが可能な目標類別装置を得る。
【解決手段】高距離分解能送信した場合に得られるレンジプロフィール推定結果、高ドップラ分解能送信した場合に得られるドップラ分布推定結果、高PRF送信した場合に得られるフラッシュ推定結果、および、追尾処理により得られる航跡推定結果が全て揃うまで待たずに、目標判定部14は、出力されるタイミングが早い推定結果から順に用いて目標を類別する。
(もっと読む)
レーダ装置
【課題】MTI処理による追尾目標の探知においてブラインド速度領域にある探知困難な移動目標が存在した場合にも、初探知を含め探知・追尾を容易に行えるようにする。
【解決手段】目標の探知を探索走査時にはビデオ積分処理系行い、また追尾走査時にはMTI処理系で行うようにし、処理系のビデオ信号にプロット生成処理、目標の予想位置、速度の算出を行い、目標情報作成・管理部により、速度が閾値を超えた目標を追尾の対象目標として抽出して目標情報を作成すると共に、ブラインド速度領域に入る速度を持つ対象目標を抽出し、追尾PRF算出部により当該対象目標の速度のドップラ周波数を算出し、当該ドップラ周波数の1/2程度の値を追尾ビームの送信PRFとして算出して励振受信部に与える。
(もっと読む)
アンテナビームの方向を制御するための方法およびシステム
【解決手段】
実施例において、アンテナビームの方向を制御するシステムは、位置識別器、方位センサ、および、アンテナビーム・コントローラを含む。位置識別器は、送信アンテナの位置を示すアンテナの位置を計測する。送信アンテナはアンテナビームを発生させる。方位センサは、送信するアンテナの方位を示す送信アンテナの方位を測定する。アンテナビーム・コントローラは:目標の受信アンテナを記述した目標データにアクセスし(目標データは、送信ンテナに対応する受信アンテナの位置を含む)、送信アンテナの位置、送信アンテナの方位および目標データからの偏差、の値を計算し、かつ偏差の値を下げるためにアンテナビームの方向を調整する。 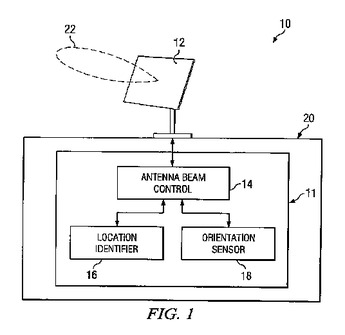 (もっと読む)
(もっと読む)
ブイ型レーダ装置及びブイ型レーダシステム
【課題】 山などの障害物や民家や放送局のある方向など、電波輻射が制限される領域においては、他の艦船搭載のレーダ装置や陸上に設置されたレーダ装置が存在せず、艦船搭載のレーダ装置だけでは目標を直接探知できない。
【解決手段】 海上にブイとして浮遊可能なブイ型レーダ装置を探知したい海域に設置する。ブイ型レーダ装置には自らの位置及び姿勢を検出する位置姿勢測定装置、レーダ装置の観測情報により生成した目標情報を登録する目標情報データベース、目標情報を艦船や他のブイ型レーダ装置に送受信する通信装置を備える。これによりブイ型レーダ装置は、海上に浮遊しながら目標の捜索、探知、追尾を行い、目標情報を通信装置により艦船等に伝達し、艦載搭載のレーダ装置では直接探知できない領域の目標が探知可能となる。
(もっと読む)
信号処理装置および信号処理方法
【課題】応答時間の短縮を図った信号処理装置および信号処理方法を提供すること。
【解決手段】処理対象データを処理する複数のデータ処理部#1〜#3を備え、必要なレスポンスタイム(応答時間)に応じて処理領域(データ量)の空間的広がりを増減することにより、レスポンスタイム(応答時間)を短縮する。つまり同じ速さの目標であっても距離が近ければ近いほど大きく動く(角速度が大きい)ことから、レンジによってアクションに対する要求が違うことに着目し、近距離レンジほどプロセッサに一度に与えられるデータ量を少なくして応答時間を短縮する。
(もっと読む)
追尾アンテナ装置、追尾制御方法およびそのプログラム
【課題】 固有の振幅誤差や位相誤差を補正し、さらに雑音の影響を低減したモノパルス方式を実現し、高い指向精度を達成する。
【解決手段】 アンテナは、目標物からの電波を受信する2つ以上の給電部を備え、各給電部からそれぞれ出力される受信信号の和信号と差信号を生成する和信号・差信号生成手段と、指向誤差がない状態で予め計測された受信信号間の振幅誤差を保有する経路上振幅誤差保有手段と、指向誤差がない状態で予め計測された受信信号間の位相誤差を保有する経路上位相誤差保有手段と、和信号レベルおよび差信号レベルと振幅誤差を用いて受信信号間の位相差を算出する受信信号間位相差算出手段と、受信信号間の位相差と経路上位相誤差保有手段から入力する位相誤差を用いて、アンテナの指向誤差角を算出して指向方向可変手段に出力する指向誤差角算出・制御手段とを備える。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】目標の機動の種類が等速旋回の場合には目標の針路は変化するが速さは一定であり、機動の種類が等速旋回直進加減速の場合には目標の速さは変化するが針路は一定であるが、従来の方法では、変化する諸元の追従の遅れの回復を早める一方、一定である諸元の誤差が大きくなることが課題であった。
【解決手段】目標の機動を検知時に目標諸元誤差予測値を大きめに調整する際に、機動の種類と目標の針路を考慮して、目標諸元誤差予測値を、変化している諸元の方向に大きめに、一定の方の諸元の方向に小さめに調整することにより、変化する諸元の追従の遅れの回復を早めながら、一定である諸元の誤差の増大を避けることを可能にする。
(もっと読む)
171 - 180 / 276
[ Back to top ]