
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
141 - 150 / 276
レーダ装置
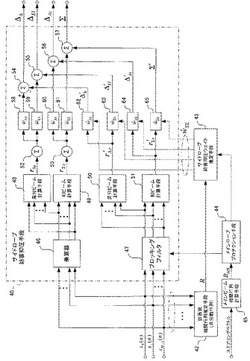
【課題】メインビームを妨害する妨害波が存在する条件下でも、モノパルス測角による目標測角を可能としつつ、演算量を軽減してコストアップを回避したレーダ装置を得る。
【解決手段】ビーム信号を送信して目標からの反射信号を受信する送受信機と、目標の到来方向を測角するモノパルス測角手段と、受信信号に含まれるメインビームを妨害する妨害波またはメインビームに干渉する干渉波を除去するための信号処理部10Aとを備え、信号処理部10Aは、メインビームを保護するメインローブプロテクション手段44と、受信信号から妨害波を除去するサイドローブ妨害抑圧手段40とを備えている。サイドローブ妨害抑圧手段40は、メインローブプロテクション手段44と協働して、メインローブ成分の過剰抑圧を防ぐためのブロッキングフィルタ47を含む。
(もっと読む)
航跡割当装置

【課題】組合せ最適化問題を解くメタヒューリスティックス手法を用いて航跡割当問題の一つであるMFA問題の解を高速に求める航跡割当装置を提供する。
【解決手段】測定して蓄積された移動体の航跡に関する観測データに基づき、予め定められた制約条件に違反しない複数の航跡候補を割当パターン群として生成し、この生成された割当パターン群を構成する各割当パターンに対し、航跡の始点に基づくグループに分類し、各グループの各割当パターンに対して一意の番号を付与する航跡候補群生成手段3,4と、各割当パターンに付与された番号に基づき、組合せ最適化を図るメタヒューリスティックス手法によって観測値を航跡に割り当てる航跡割当処理を行う航跡割当処理手段5〜10とを有することを特徴とする航跡割当装置にある。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段で今回検出された各検出点をグルーピングするグルーピング手段3と、前回のグループに基づいてグルーピング手段3で今回グルーピングされた複数のグループを統合する統合手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
精測進入レーダシステム
【課題】着陸進入中の航空機に対してタイムリーで効率的な誘導管制を行なうとともに、その誘導管制の業務負荷を軽減できる精測進入レーダシステムを得る。
【解決手段】くり返し取得される航空機の観測位置を、予測フィルタを用いて平滑化するとともに、所定時間幅経過後の予測位置を算出し、これら最新の平滑化位置と予測位置とをシンボル化して表示する。また、予測位置に対しては、その位置誤差として予測位置に対する標準偏差を算出し、これを航空機の確率的な存在範囲としてシンボル化された予測位置の周囲に2次元に重ね合わせて表示する。さらに、位置誤差を算出する際には、その誤差要因としてレーダの観測精度のみならず、予測フィルタにおける処理誤差特性も考慮に加える。
(もっと読む)
物体検出装置
【課題】レーダを用いた物体検出において物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1であって、物体の位置を検出するレーダ検出手段2と、レーダ検出手段2で今回検出された検出点をグルーピングするグルーピング手段3と、前回の複数のグループに基づいてグルーピング手段3で今回グルーピングされたグループを複数のグループに分割する分割手段3と、各グループの検出点を用いて物体を検出する物体検出手段3とを備えることを特徴とする。
(もっと読む)
目標追尾装置
【課題】速度推定値の精度が悪い場合でも追尾継続が可能な目標追尾装置を得る。
【解決手段】ドップラ速度変化率が閾値を超えるか否かを判断し、ドップラ速度変化率が閾値を超えない場合には、直進目標用フィルタを選択し、ドップラ速度変化率が閾値を超える場合には、旋回目標用フィルタを選択するとともに、この時点におけるヘディングの値をヘディング基準値に設定し、その後、前記旋回目標用フィルタを選択した場合に、判定保留期間が経過するまで旋回目標用モデルを選択し、判定保留期間中に、現フレームのヘディングと前記ヘディング基準値の差異であるヘディング変化が閾値を超えるか否かを判断し、ヘディング変化が閾値を超える場合には、判定保留期間が経過した以降も旋回目標用モデルを選択し続け、ヘディング変化が閾値を超えない場合には、判定保留期間が経過した以降は直進目標用モデルを選択する追尾処理部20Aを設けた。
(もっと読む)
レーダシステム
【課題】目標を安定して追尾することが可能なレーダシステムを提供する。
【解決手段】Xバンドのレーダ映像中に偽像又はクラッタが存在し、さらに、各ARPA装置8a、8bが同一の目標をそれぞれ追尾している場合に、追尾部17bの目標追尾部26は、Sバンドの目標の位置を指示機16aに送信し、指示機16aの追尾位置比較部44は、受信した指示機16bからの目標の位置と、追尾部17aの目標追尾部26からのXバンドの目標の位置との差分を求め、前記差分が所定の閾値を上回るときに前記差分を追尾部17aの目標追尾部26に出力する。該目標追尾部26は、前記差分を用いて目標の位置を補正する。
(もっと読む)
車載用レーダ装置
【課題】 間違った目標捕捉(乗り移り)の発生を回避できる車載用レーダ装置を提供する。
【解決手段】 自車(10)前方にパルス状の電磁波(12)を周期的に照射し、その反射波(13)に基づいて、少なくとも目標の水平方向の幅を測定する車載用レーダ装置(11)において、前記反射波の先回または数回前の強さと今回の強さとを比較する比較手段(17)と、今回の反射波の強さが急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに間違った目標であると判定する第1判定手段(17)とを備える。または、今回の反射波の強さが急増大したときに間違った目標であると判定する第2判定手段(17)を備える。
(もっと読む)
レーダデータ処理動作ための方法および装置
【課題】レーダの正確に場所を決定するために衛星航法システム(GPS)およびデジタル標高地図(DEM)とレーダデータを同期することが可能なレーダ試験動作システムを提供する。
【解決手段】飛行試験のレーダデータを利用してレーダシステムを試験するための方法が述べられる。この方法は、測定されたレーダデータをGPSに基づく時間マーカと時間同期させるステップ、時間同期させられたレーダデータの少なくとも一部を記憶するステップ、GPSデータを記憶するステップ、記憶されたGPSデータを処理することでレーダデータを受信したアンテナの物理的位置と対応させるステップ、レーダモデルを供給するステップ、および処理されたレーダモデルデータを記憶されたレーダデータと比較するステップを含む。
(もっと読む)
目標追尾装置及び目標観測システム及び目標追尾方法及びプログラム
【課題】複数の目標が重なって一つの目標として観測されたのち重なった目標が離れて再び複数の目標として観測された場合でも、正しく目標を同定できる相関処理を実現する。
【解決手段】重複判定装置115は、複数の目標が重なって一つの目標として観測されたか否かを判定する。目標間距離算出装置121は、複数の目標が重なる直前に観測された位置の間の距離(重複前距離)を算出する。目標間距離ゲート設定装置131は、重複前距離に基づいて分離判定範囲を設定する。分離判定装置132は、分離判定範囲内に新たな目標が観測された場合に、重なった目標が離れて再び複数の目標として観測されたと判定する。分離妄評移動距離算出装置133は、分離目標移動距離を算出する。分離目標判定装置135は、分離目標移動距離に基づいて重なった目標が離れて観測された複数の目標を同定する。追尾装置150は、分離目標判定装置135が同定した目標を追尾する。
(もっと読む)
141 - 150 / 276
[ Back to top ]