
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
161 - 170 / 276
目標追尾装置及び目標追尾方法
【課題】ゲートが不必要に拡大するのを防ぎ、高速移動目標に対しても正確にゲート内に目標を捕捉できる目標追尾装置および目標追尾方法を得る。
【解決手段】本発明の追尾装置及び追尾方法は、北基準直交座標での目標運動における加速度ベクトルを駆動雑音とせずに、極座標での速度ベクトルのふらつきを駆動雑音としている。すなわち、平滑値ベクトルから速度ノルムと駆動雑音ベクトルの座標変換行列を算出し、その値と駆動雑音分散の設定値とから駆動雑音共分散行列を算出し、それを用いて追尾処理を行う。これにより、サンプリング間隔が大きい時にも、ゲートの極端な拡大を防ぐとともに、1サンプリング前の目標の速度成分を引用するゲート設定により、目標速度の大小に合わせた駆動雑音を設定し、目標速度に応じてゲートの広さを変化させ、最適なゲート設定を行うことが可能となる。
(もっと読む)
追尾照準装置

【課題】画像処理に要する時間が多大になることによって発生する照準方向のずれ量を除去して高精度に目標物を追尾できる追尾照準装置。
【解決手段】照準軸が目標物に向くように照準方向を合わせて光を照射する照準器1と、照準器から光が照射された目標物からの反射光を撮像面に結像させることにより該目標物を撮像する撮像器2と、撮像器によって撮像された画像に基づき撮像器および照準器の指向方向を算出する制御器5と、制御器によって算出された指向方向に照準器および撮像器を一体として駆動して位置決めを行う位置決め機構4とを備えた追尾照準装置において、制御器は、指向方向を算出する間に目標物の相対位置が変化することによる照準方向のずれ量を、現在の目標物の位置および直前の目標物の位置に基づき補正量として算出し、該算出した補正量に基づき照準器の照準方向を補正する照準制御部13を備える。
(もっと読む)
目標追尾装置、目標追尾方法、目標追尾プログラム
【課題】同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化を低減するとともに、航跡の高精度化を目的とする。
【解決手段】追尾処理部108は、観測精度を示す観測精度パラメータが設定された観測モデルを用いて、検出装置200から取得した検出情報に基づき目標の追尾を行う。クラスタリング算出部104は、検出装置200から取得した検出情報が示す目標と認められる位置の集合を示すプロット集合を算出する。サイズ算出部110は、プロット集合の大きさであるプロット集合サイズを算出する。パラメータ制御部112は、プロット集合サイズの大きさに基づき、追尾処理部108が用いる観測モデルに設定された観測精度パラメータが示す観測精度を制御する。
(もっと読む)
目標追尾装置、目標追尾プログラム及び目標追尾方法
【課題】高分解能センサにより同一目標から複数の検出位置を得るセンサシステムにおいて、検出位置の重心位置精度劣化の低減を図るとともに、目標の航跡の高精度化を目的とする。
【解決手段】検出情報決定部120は、複数の検出装置から取得した検出情報の内、1つの検出装置から取得した検出情報に基づき目標の追尾を行うか、あるいは2つ以上の検出装置から取得した検出情報に基づき目標の追尾を行うかを所定の条件に基づき選択する。また、検出情報決定部120は、選択した結果に基づき、目標の追尾に使用する検出情報を決定する。追尾処理部140は、決定された検出情報に基づき目標を追尾する。
(もっと読む)
航跡統合装置及びプログラム及び航跡統合方法
【課題】センサが目標を観測した観測データに基づいて推定した目標の航跡を表わす複数のセンサ航跡データを統合して、精度の高い統合航跡データを生成する。
【解決手段】航跡入力部210は、複数のセンサ航跡データ510を入力する。航跡精度算出部260は、航跡入力部210が入力したセンサ航跡データ510に基づいて、航跡精度評価値を算出する。航跡精度評価値は、センサ航跡データの精度を表わす。重み付け算出部270は、航跡精度算出部260が算出した航跡精度評価値に基づいて、航跡調整係数を算出する。航跡調整係数は、センサ航跡データの重み付けを表わす。統合航跡生成部280は、重み付け算出部270が算出した航跡調整係数に基づいて、センサ航跡データを統合し、統合航跡データ580を生成する。
(もっと読む)
目標角度測定装置
【課題】パルスレーダ装置において受信された反射波に積分処理を行なって検出した目標に対して測角処理を行なう際に、より確度の高い測角結果を取得する目標角度測定装置を得る。
【解決手段】受信されたレーダパルスの反射波をCPIの期間積分処理を行なって検出した目標に対して測角処理を行なう際に、CPIの期間中における目標の測角ビーム内での角度変化の傾向を反映させてあらかじめテーブル値を設定した複数の測角テーブルを用意し、検出した目標のCPIの期間中における測角ビーム内での角度変化の傾向を予測するとともに、その結果に基づき複数の測角テーブルの中から適切な測角テーブルを選択しこれを適用して測角値を算出する。
(もっと読む)
追尾装置
【課題】高精度で測角して追尾性能を向上させることができる追尾装置を提供する。
【解決手段】空中線6と、空中線からのモノパルスビームを用いて行われる通常アンテナ開口によるモノパルス測角により、目標を所定の角度範囲に追尾するモノパルス測角処理部101と、モノパルス測角処理部により所定の角度範囲に追尾された目標を、空中線からのモノパルスビームを用いて行われる合成開口によるモノパルス測角により高角度分解能で追尾する高角度分解能処理部102を備えたことを特徴とする。
(もっと読む)
基準値算出方法及び基準値算出装置
【課題】目標の位置を評価する基準値を高精度に算出できる基準値算出方法及び基準値算出装置を提供する。
【解決手段】目標の観測値、観測誤差及び推定値から航跡を評価する基準値を算出する基準値算出方法又は装置であって、過去の目標の複数個の基準値に基づき、スプライン補間法により前記推定値を算出する。
(もっと読む)
通信装置
【課題】アンテナにより移動体からの電波を追尾する通信装置で、複数のアンテナを切り換えて使用する場合に、追尾の精度を向上させる。
【解決手段】切換手段5が移動体からの電波を受信する複数の系統のアンテナ1、2のうちの1つの系統のアンテナを使用するように切り換え、処理実行手段41、43、44、45、47が受信信号に基づく差信号及び和信号に対してレベル又は位相に関する処理を実行し、角度誤差検出手段51〜53が処理後の差信号及び和信号に基づいてアンテナの角度誤差を検出し、角度調整手段66、3が検出結果に基づいてアンテナの角度を調整し、制御態様記憶手段66が処理の制御態様を各系統毎に対応させて記憶し、処理制御手段66が系統に対応した制御態様に基づいて処理を制御する。
(もっと読む)
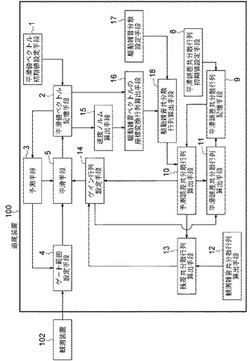
ロケット追尾レーダ装置
【課題】ロケットから分離した小物体や爆破によるロケットの破片を探知、追尾し、落下範囲を予測可能にする。
【解決手段】分離・爆破判定部がロケットの分離、爆破の状態を表す信号を基に分離、爆破を判定し、閾値制御部が破片データベースの対象の破片情報に基づいて推測したサイズの破片を目標として検出するように目標検出部の検出閾値を変更し、追尾制御部が対象の破片情報に基づいて破片のまとまりを目標として一つの追尾ビームにより追尾できるように追尾部の追尾フィルタの変更し、追尾部は対象の破片情報に基づいて追尾フィルタを変更して追尾処理を行うと共に、破片のまとまりに対する追尾ビームを形成するよう送受信装置を制御し、落下範囲予測部は破片のまとまりに対応した追尾結果データおよび対象の破片情報に基づいて破片の予測落下範囲を算出する。
(もっと読む)
161 - 170 / 276
[ Back to top ]