
国際特許分類[G01S13/66]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | レーダ追跡方式;類似の方式 (328)
国際特許分類[G01S13/66]の下位に属する分類
国際特許分類[G01S13/66]に分類される特許
81 - 90 / 276
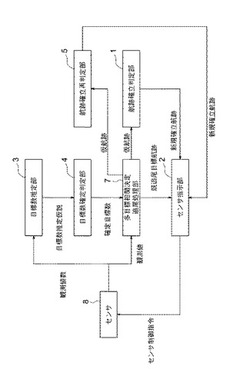
多目標追尾装置
【課題】早期にかつ正確に目標航跡を確立させる多目標追尾装置を得る。
【解決手段】サンプリング時刻毎の観測値数の履歴から目標数の仮説を立て、仮説の信頼度を計算することにより目標数を推定する目標数推定部3と、当該信頼度により目標数を決定する目標数確定判定部4と、決定された目標数に応じて多目標相関決定追尾処理部7の仮航跡の候補を抽出し、当該候補の最新の平滑値の尤度を過去数サンプリング時刻分の観測値に対して計算し、最も尤度が大きい仮航跡を選択して航跡を確立する航跡確立再判定部5とを備え、多目標相関決定追尾処理と並行して目標数推定を行って、分離目標の存在が確認されたら、多目標相関決定追尾処理で生成された仮航跡群から最も確度の高い航跡を抽出して確立させることによって、早期にかつ正確に目標航跡を確立させる。
(もっと読む)
目標相関処理装置、目標相関処理方法及びプログラム

【課題】地上目標物に適した目標相関処理装置を提供する。
【解決手段】目標物センシング情報が示す目標物の位置、速度、加速度、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向のうちの何れか複数を少なくとも用いて、所定時間経過毎の目標物センシング情報が示す目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、過去に受信した目標物センシング情報を更新する。そして、受信した目標物センシング情報と、予測処理により更新された更新後の目標物センシング情報とが相関するかを判定する。また、受信した目標物センシング情報と更新後の目標物センシング情報とが相関すると判定した場合には、更新後の目標物センシング情報を受信した目標物センシング情報に再更新する。
(もっと読む)
目標物探知装置および目標物探知方法
【課題】失探した目標物と、新たに探知された目標物を関連付け同一目標物であることを明確にし、目標物を継続して探知できる目標物探知装置および目標物探知方法を提供する。
【解決手段】レーダ装置ごとの覆域領域と、予め決められた領域から覆域領域を除いた領域を区分した覆域外領域との隣接に関する情報と、覆域外領域間の隣接に関する情報と、レーダ装置の覆域外へ移動した目標物を最後に探知した位置と日時と覆域領域と該目標物の速度、種別を、目標物の識別子に対応付けた失探情報と、レーダ装置が新たに探知した目標物の情報と、に基づいて、該失探した目標物と新たな目標物を関連付ける目標物探知装置である。
(もっと読む)
自動追尾レーダ装置および自動追尾方法
【課題】雑音帯域幅の狭い追尾ループでの追尾を可能とし、追尾限界となるS/N比を改善することが可能な自動追尾レーダ装置を提供する。
【解決手段】ロケットやスペースデブリ等の飛翔体を自動追尾する自動追尾レーダ装置として、前記飛翔体を初期捕捉して、自動追尾モードに移行した以降において、アンテナ指向追尾系ループのアンテナ指向誤差検出器16、積分器17および距離追尾系ループの距離誤差検出器23、積分器24にて検出されたアンテナ指向誤差および距離誤差に基づき、アンテナ追尾ループフィルタ18および距離追尾ループフィルタ25それぞれにて生成されるアンテナ指向角度の制御情報および受信タイミングの制御情報を、予見情報(角速度、各加速度)加算器27および予見情報(速度、加速度)加算器26にて、前記飛翔体の軌道予測値、他のレーダ装置の追跡情報または過去の追跡データに基づく予測値である予見情報を用いてさらに補正する。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾において、従来のウィンドウを用いた場合に発生する目標の乗り移り、ロストといった問題を解消する。
【解決手段】あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行い、被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する。
(もっと読む)
信号処理装置、レーダ装置、信号処理プログラム及び信号処理方法
【課題】簡単な構成で、不要信号を抑圧しつつ高速移動ターゲットの検出を可能とする信号処理装置を提供する。
【解決手段】信号処理部は、スイープメモリと、スキャン相関処理部11と、出力切替部12と、を備える。スイープメモリは、アンテナが受信した信号の信号レベルを示した受信データを取得する。スキャン相関処理部11は、受信データにスキャン相関処理を施したスキャン相関処理済データを出力する。出力切替部12は、受信データの信号レベルが所定の出力切替閾値以上である場合は当該受信データを出力し、受信データの信号レベルが出力切替閾値未満の場合はスキャン相関処理済データを出力する。
(もっと読む)
センサバイアス推定装置
【課題】バイアスベクトル推定値を高精度に算出可能なセンサバイアス推定装置を得る。
【解決手段】それぞれのセンサが、観測値と予測値とに基づいて相関観測値を算出するとともに、相関観測値に基づいてセンサ航跡を算出し、算出結果を出力する装置に適用され、複数のセンサ10、20のバイアスを推定するセンサバイアス推定装置であって、センサ航跡に基づいて、時刻同期および航跡相関を実行し、同一航跡と判定されたセンサ航跡の組を出力する同期処理部30と、同一航跡と判定されたセンサ航跡の組に対してバイアス格子点探索処理を実行し、バイアス推定値を算出するバイアス格子点探索処理部40と、相関観測値に基づいて、バイアス推定フィルタ処理を実行し、バイアスベクトル推定値を算出するバイアス推定フィルタ処理部60とを備え、バイアス推定フィルタ処理部60は、バイアス推定値をバイアスベクトル推定値の初期値として設定するものである。
(もっと読む)
飛翔体探知方法及びシステムならびにプログラム
【課題】飛翔体の3次元位置を特定する飛翔体探知方法等を提供する。
【解決手段】地上を飛翔する飛翔体を撮影可能な観測器及び撮影画像を送信する送信器を備えた少なくとも2機の人工衛星と、送信された少なくとも2枚の画像データを受信するためのアンテナとアンテナにより受信した少なくとも2枚の画像データを解析して飛翔体の位置を解析する位置解析装置とを備えた基地局とで構成される飛翔体探知システムであって、位置解析装置は、各々の人工衛星の頂角及び方位角を算出する算出部と、これら頂角及び方位角から観測ベクトルを生成する観測ベクトル生成部と、各々の人工衛星の位置情報、速度情報等に基づいて座標変換行列を生成する座標変換行列生成部と、飛翔体位置初期値と座標変換行列とから係数を生成する係数生成部と、これら係数と観測ベクトルとから定められるパラメータ推定処理を実行するパラメータ推定処理部とを備えたことを特徴とする。
(もっと読む)
目標追跡装置
【課題】追跡精度を向上させることができる目標追跡装置を提供する。
【解決手段】目標を追跡するアクティブセンサ3からの観測値に基づく目標航跡と、目標の角度を測定するパッシブセンサ1からの観測値に基づく目標航跡とが同一目標を示していると判定した場合にこれら2つの目標航跡のデータ融合を行ってデータ融合航跡として出力するデータ融合部5と、データ融合部からのデータ融合航跡に基づいて、パッシブセンサからの観測値を入力して目標の航跡を算出するための補正情報を算出する補正情報算出部6aと、パッシブセンサからの観測値と補正情報算出部からの補正情報に基づいて、目標の航跡を算出して目標航跡として出力するパッシブセンサ処理部2aを備える。
(もっと読む)
目標追跡装置
【課題】追跡精度を向上させることができる目標追跡装置を提供する。
【解決手段】外部から入力される目標の状態ベクトルに基づいて、目標の角度を測定して測角データとして出力するパッシブセンサからの測角データを入力して目標の航跡を算出するための補正情報であって、該パッシブセンサを中心とする座標系における補正情報を算出する補正情報算出部5aと、パッシブセンサからの測角データと補正情報算出部からの補正情報とに基づいて、該パッシブセンサを中心とする座標系における目標の航跡を算出する追跡処理部2aを備える。
(もっと読む)
81 - 90 / 276
[ Back to top ]