
国際特許分類[G01S7/32]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | グループ13/00,15/00,17/00による方式の細部 (3,965) | グループ13/00による方式のもの (2,705) | パルス方式の細部 (874) | 受信機 (643) | 反響パルス信号の整形;反響パルス信号から非パルス信号の導出 (172)
国際特許分類[G01S7/32]に分類される特許
71 - 80 / 172
パルス圧縮装置および物標探知装置
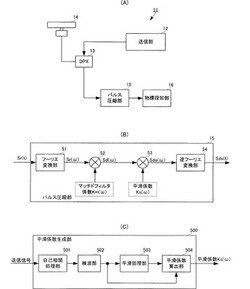
【課題】ノンリニアFMチャープ送信信号を用いても、サイドローブを抑圧することができるパルス圧縮装置を実現する。
【解決手段】パルス圧縮部15のフーリエ変換部51は、時間軸の受信信号Sr(t)を周波数軸の受信信号Sr(ω)に変換する。マッチドフィルタ52は、受信信号Sr(ω)にパルス状送信信号の複素共役からなるマッチドフィルタ係数Ks(ω)を乗算し、信号Sd(ω)を出力する。平滑処理部53は、信号Sd(ω)にマッチドフィルタ出力の周波数スペクトルを滑らかにする平滑係数Ks(ω)を乗算し、平滑処理後の信号Sds(ω)を出力する。逆フーリエ変換部54は、周波数軸の平滑処理後の信号Sds(ω)を時間軸の平滑処理後の信号Sds(t)に変換し出力する。
(もっと読む)
信号処理装置

【課題】 従来のCFAR(Constant False Alarm Rate)回路では、入力信号特性とCFAR回路特性が合わないため、近接する複数目標を検出できない場合や、クラッタを抑圧できず誤検出する場合があった。
【解決手段】 CFAR回路内の各参照セル内の最大値を除いて平均することにより、特定振幅によるノイズレベル上昇を抑圧することができる。また、クラッタのような広がりのある信号存在時には、GO−CFARを用いることにより、ノイズレベルが上昇し誤警報を抑圧することができる。
(もっと読む)
レーダ装置
【課題】目標角度を正確に計測することのできるレーダ装置を得る。
【解決手段】互いに異なる条件で観測した複数チャネルにおいて、それぞれ和信号と差信号とを観測する多チャネルモノパルス信号観測手段と、複数チャネルの信号にフィルタ処理を適用することにより、和信号および差信号に含まれる背景の不要信号をそれぞれ抑圧するフィルタ手段2a、2bと、フィルタ手段2a、2bにより背景の不要信号が抑圧された信号に対して閾値判定処理を適用し、目標の存在するレンジセルを検出する目標検出手段3と、目標検出手段3により検出された目標の存在するレンジセルにおいて、背景の不要信号を抑圧した和信号および差信号を用いたモノパルス測角処理を適用し、目標角度を計測する多チャネルモノパルス測角手段4と、を備えている。
(もっと読む)
目標検出装置及び目標検出方法
【課題】低S/N環境下においても目標を精度良く検出できるようにする。
【解決手段】目標検出器4は、目標からの反射波を観測した信号から目標の距離と周波数とを2次元で表す観測信号を求める解析処理器11と、複数の粒子フィルタを並列に用いて、観測信号と基準時刻より前に抽出された予測信号とをもとに、基準時刻における目標の距離と周波数の候補点を粒子分布で表した複数の予測信号を抽出する抽出処理器12と、抽出された複数の予測信号の粒子分布から、予め定められたしきい値を超えるゆう度を持つ粒子を、基準時刻における目標の距離と周波数とを示す目標信号として検出する検出処理器13と、検出された粒子の軌跡をもとに目標を追跡する追跡処理器14とを具備する。
(もっと読む)
レーダ装置
【課題】高精度で測高を行うことができるレーダ装置を提供する。
【解決手段】ビームを形成してビームデータとして出力するビーム形成部13と、ビーム形成部からのビームデータを積分する検出用積分処理部14と、検出用積分処理部における積分結果に基づき目標を検出する検出処理部15と、ビーム形成部からのビームデータを記憶するビームデータ記憶装置16と、検出処理部で目標の検出に使用されたビームデータを、各々が所定の積分数のビームデータを含む複数の処理単位に分割し、ビームデータ記憶装置から処理単位毎にビームデータを読み出して積分する測高用積分処理部17と、測高用積分処理部における処理単位毎の積分結果に対して処理単位毎に測高演算を行う測高演算部18と、測高演算部における処理単位毎の測高演算によって得られた分割数分の測高値の平均をとって観測された測高値として出力する測高演算制御装置19を備える。
(もっと読む)
車両用レーダ装置
【課題】物体によって異なる電波の反射の強さに影響されることなく、不要な物体に対する誤検出を防止する。
【解決手段】検出波形と基準波形との差分を算出し(S5)、距離hで閾値S以上の強度の差分信号が得られたか否かを判断する。その結果、距離hにおける差分信号の強度が閾値S以上である場合には、路上のマンホールや金属ジョイント等の不要物体からの反射であるとし、距離hにおける差分信号の強度が閾値S未満である場合には、更に、物体検出に要した時間t、または物体を継続的に検出し続けている時間tが車速Vに応じた閾値(L+B)/V以上か否かを判断する。その結果、t≧(L+B)/Vの場合には、通常の警報処理を行い、t<(L+B)/Vの場合、一瞬の検出による不要物体の誤検出であると判断する。
(もっと読む)
モノパルスシステムにおける互いに間隔が接近した複数の標的の検出および分解
【課題】間隔が接近した二標的を表す第一と第二の方位角値を決定する方法を提供すること。
【解決手段】この方法は、モノパルスシステムにおいて間隔が接近した二標的を含むモノパルス走査を行い、モノパルスレーダー走査データを生成することと、モノパルス走査データを処理し、直交角データと結合方位角データと直交角の最大絶対値とを提供することと、直交角の最大絶対値を閾値と比較することと、直交角の最大絶対値が閾値を超える場合、モノパルス走査内の角領域にわたる直交角データの積分から第一と第二の方位角値を導くことと、直交角の最大絶対値が閾値を超えない場合、結合方位角データをモノパルスレーダーのボアサイト角の関数として多項式にフィッティングし、第一と第二の方位角値を導くことと、第一と第二の方位角値を関連したディスプレイでユーザーに表示することとを含む。
(もっと読む)
広帯域レーダ装置
【課題】 距離の離れた目標物を精度よく検出することができる広帯域レーダ装置を提供する。
【解決手段】 生成する信号の周期が連続的に又は段階的に小さくなる受信クロック信号を生成する受信クロック生成部115と、受信クロック信号に同期したゲートパルス信号を発生するゲートパルス信号発生部221と、UWB送信パルス信号の反射波を受信アンテナ部210で受信した受信パルス信号を、ゲートパルス信号の信号レベルが所定レベルにある期間に検波して、受信パルス検波信号を出力する検波部222と、検波部222で検波した受信パルス検波信号を積分して信号を取り出す積分部223と、積分部223で取り出された信号に信号レベルの減衰分を補正する係数を積算して時間感度制御を行う時間感度制御部241と、信号レベルを補正した信号の所定時間ごとの差分を計算して、目標物の移動を検出する差分計算部242とを有している。
(もっと読む)
レーダ信号処理装置
【課題】目標物の検出状況に応じて目標物の検出能力を可変とし、通常の検出処理では検出できない、より小さな目標物を検出できるレーダ信号処理装置を得る。
【解決手段】目標物で反射した受信信号を受信し、受信データを出力する受信部2と、受信データに対して積分処理を実行し、積分データを出力するFFT部31、積分データを記憶する現結果保持部32および前結果保持部33、並びに追加積分要求に応じて、新たな積分データを算出する位相整合部34および合算部35を有する積分部3と、積分データのピーク位置を検出し、積分データとともに出力する検出部4と、ピーク位置および積分データに基づいて、目標物までの距離および目標物との相対速度の少なくとも一方を算出する状態算出部5と、検出部4で検出されたピーク位置の数が所定値よりも少ない場合に、積分部3に対して追加積分要求を出力する追加積分判定部6とを備えている。
(もっと読む)
レーダ信号処理装置及びレーダ装置
【課題】I/Q検波回路で行われていたI/Q検波を、ハード規模の増加なく、処理の遅延を抑え、ソフトウェア処理により実行することが可能なレーダ信号処理装置及びそのレーダ信号処理装置を用いたレーダ装置を提供する。
【解決手段】アナログ−デジタル変換部から出力されるデジタル信号に対して、DSP20においてFFT処理21を行うことで、入力信号を所定の大きさのデータにブロック化する。そして、このブロック化された信号に対して零埋め処理22及び周波数シフト処理23を施した後、逆FFT処理24を行うことでI/Q信号を生成するようにしている。生成されたI/Q信号は、所定のクロック周波数に近づくべく、間引き処理25される。これにより、入力されるデジタル信号をブロック単位で処理することが可能になるため、I/Q検波をソフトウェア処理で行う際に、演算量の増加を抑えることが可能となる。
(もっと読む)
71 - 80 / 172
[ Back to top ]