
国際特許分類[G03B37/00]の内容
物理学 (1,541,580) | 写真;映画;光波以外の波を使用する類似技術;電子写真;ホログラフイ (245,998) | 写真を撮影するためのまたは写真を投影もしくは直視するための装置または配置;光波以外の波を用いる類似技術を用いる装置または配置;そのための付属品 (67,505) | パノラマまたはワイド・スクリーン写真;広範囲面撮影,例.測量用;内部表面撮影,例.管の (415)
国際特許分類[G03B37/00]の下位に属する分類
レンズまたはカメラの走査運動をもつもの (14)
写界を接せしめまたは重ね合わせられるカメラまたは映写機を用いるもの (37)
像に歪みをもたせるもの (6)
国際特許分類[G03B37/00]に分類される特許
11 - 20 / 358
撮像装置
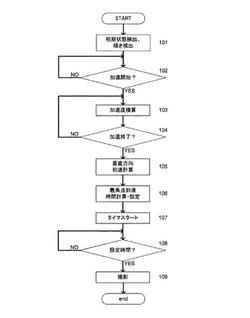
【課題】撮像装置を投げ上げ、最高高さあるいは所望の設定高さで自動的に撮影可能とする。
【解決手段】撮像装置に加速度センサを内蔵する。加速度センサを用いて撮像装置が放り投げられる過程の加速度を検出し、該加速度から撮像装置の初速度と放出角度を算出し、該初速度と放出角度から該撮像装置が最高点あるいは設定高さに達する時間を算出し、該算出した時間のタイミングで撮影を行うようにする。
(もっと読む)
撮像光学系および全天球型撮像装置および撮像システム

【課題】全天球型撮像装置に用いられる撮像光学系の、撮像センサを設けた基板により入射光束が遮られる問題を有効に解決し、小型の全天球型撮像装置を実現する。
【解決手段】180度より広い画角を持つ広角レンズと、この広角レンズによる像を撮像する撮像センサとによる同一構造の撮像光学系を2つ組み合わせ、各撮像光学系により撮像された像を合成して4πラジアンの立体角内の像を得る全天球型撮像装置における撮像光学系であって、広角レンズは、物体側から像側へ向かって、前群、反射面、後群を配してなり、前記反射面により前群の光軸を前記後群に向かって90度折り曲げるものであり、基板が、広角レンズの最大画角光線を遮らないように、基板のサイズおよび形状が定められている。
(もっと読む)
撮像装置、撮像装置の制御方法
【課題】 撮影方向を移動することができる撮像装置において、撮影範囲内の被写体位置の認識を容易に行う為の技術を提供すること。
【解決手段】 撮像方向を変化させながら撮像を行うことで、それぞれの撮像方向における撮像画像を取得し、取得するたびに、該取得した撮像画像から被写体を検出し、取得したそれぞれの撮像画像を連結してパノラマ画像を生成する。そして、該パノラマ画像上における被写体を報知するための情報を、パノラマ画像上に合成して出力する。
(もっと読む)
カメラ、画像再生装置、画像合成方法、およびプログラム
【課題】特別な広角レンズなどを用意せずとも、パノラマのような広がり感を表現すると共に、雄大な背景画像の中で、被写体の動きを表現できるカメラ、画像合成方法、およびプログラムを提供する。
【解決手段】撮像部3から動画を構成する各コマの画像データが第1バッファ5aに出力されるたびに、第3バッファ5dには、部分背景画像と余白部が一時記憶され、合成部7aに出力される。合成部7aは、部分背景画像が出力されるたびに、部分背景画像の一部が余白部と重複するように、部分背景画像を貼り合わせ、背景画像を生成していく。
(もっと読む)
撮像監視画面及び全方位撮像画面監視システム
【課題】全方位撮像画面の撮像エリアの外周での映像の分解能が粗い場合でも、鮮明な画像を得られる撮像監視画面及び全方位撮像画面監視システムを提供する。
【解決手段】全方位撮像画面監視システムSは、全方位を動画として撮像可能な固定された第1の撮像手段10と、動画として撮像可能な固定された第2の撮像手段20と、第1の撮像手段10と第2の撮像手段20で撮像した動画を録画する記録手段30と、記録手段30を制御する制御手段40と、第1の撮像手段10、第2の撮像手段20、記録手段30からの撮像を表示する表示手段50と、を備え、第2の撮像手段20は、第1の撮像手段10の撮像領域の外周を撮像する位置に配置されたものである。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】合成画像の生成をより効率的に行う。
【解決手段】撮像装置100は、レンズ部1、電子撮像部2及び撮像制御部3により連続して撮像された複数の画像を逐次取得する画像取得部6aと、画像取得部6aにより取得される複数の画像の一部分の領域どうしを重ねて足し合わせるように合成して合成画像を逐次生成する合成部6bと、合成部6bにより合成画像が逐次生成される毎に、当該合成画像内に所定の特徴を有する特徴領域が含まれているか否かを判定する特徴領域判定部6cと、特徴領域判定部6cにより特徴領域が含まれていると判定された場合に、合成画像内に特徴領域が含まれる旨を報知する表示制御部7及び表示部8と、を備える。
(もっと読む)
デュアルデジタルカメラセンサを備えたモバイルデバイス及び使用方法
【課題】2つのセンサから取得された画像を合成して高度なアプリケーションをサポートする。
【解決手段】モバイルデバイス100は、第1のセンサ102と、第2のセンサ104と、センサ位置コントローラ106と、カメラ処理パイプライン108とを含む。パイプラインは、例えばモザイク除去、レンズロールオフ補正、拡大縮小、色補正、色変換、及び空間フィルタリングのような技術を実行する。センサ位置コントローラは、センサ102、104を回転、シフト、又はスライドして、2つのセンサの場所及び/又は位置を調整する。センサ102、104は、画像品質の改善、3−D画像及びビデオの視覚化、及び360度パノラマビデオの生成のような機能をもつ。
(もっと読む)
撮影制御装置、撮影制御方法およびプログラム
【課題】予め指定された撮影の方向および順番に従って自動的に撮影する撮影制御装置を実現する。
【解決手段】CPUは、撮影する方向(方角)を指定する撮影方角設定データSHと、指定された方向(方角)について撮影する順番を指定する撮影順番設定データSJとが設定されていると、電子コンパスの出力に基づき現在の方角(カメラ部の撮影方向)を取得する(ステップSB3)。取得した現在の方角が、指定された順番の方角の±5°以内に収まると(ステップSB4)、現在の方角が未撮影であるか否かを判別し(ステップSB5)、現在の方角が未撮影ならば、ユーザがシャッタボタンを操作することなく、オートシャッターにより現在の方角の画像を自動的に撮影して記録する(ステップSB6)。
(もっと読む)
撮像装置
【課題】フィルムカメラやデジタルカメラなどの撮像装置で、広角レンズあるいは回転体ミラーを用いて撮影した場合に無駄になっていた、フィルムや撮像センサの四隅の領域を、有用な情報を記録するための領域として利用する。
【解決手段】撮像装置の筐体101に、光を内部に導くための導光窓105を設け、撮像センサ103までの光路として導光路107を設け、導光路107の途中に、光を透過する材質で作成された環境センサ106を配置する。魚眼レンズ102からの光が結像しない撮像センサの領域104に、環境センサが表示している環境情報を画像108として結像させる。
(もっと読む)
画像校正システム、画像校正方法及び撮像システム
【課題】外部の計測装置を用いずに、複数の撮像装置のずれ角を検出しそれぞれの画像のずれを校正する。
【解決手段】複数の撮像装置Ciが搭載された移動体Mを回転させ、第1の角速度計測装置1により移動体Mの角速度を計測し、第2の角速度計測装置2により撮像装置Ciの角速度を計測し、角速度比較部3iにより移動体Mの角速度と撮像装置Ciの角速度とを比較して各撮像装置Ciのずれ角を算出し、算出したずれ角を画像の校正角として校正角記憶部4iに記憶し、撮像部Giで取得した画像を校正角記憶部4に記憶された校正角で回転させて、画像変換部5iで複数の撮像装置Ciそれぞれで取得した画像のずれを校正する。
(もっと読む)
11 - 20 / 358
[ Back to top ]