
国際特許分類[G05D1/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941)
国際特許分類[G05D1/00]の下位に属する分類
二次元の位置または進路の制御 (1,634)
高度または深度の制御 (3)
姿勢制御,すなわちロール,ピッチまたはヨウの制御 (132)
三次元における位置または進路の同時制御 (20)
目標捜索制御 (22)
国際特許分類[G05D1/00]に分類される特許
51 - 60 / 130
ロボット制御システム及びロボット制御方法
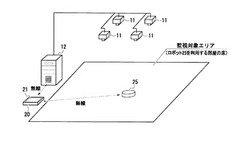
【課題】ユーザが、室内の所望の場所のみの掃除を行わせる作業等(その内容を確定させるために場所の指定を必要とする作業)をロボットに容易に行わせることが可能な環境を実現できるロボット制御システムを提供する。
【解決手段】ロボット制御システムを、ディスプレイ21上に、管理対象エリアの状況/様子を示す画像を表示するシステムであって、ディスプレイ21に表示されている画像上にユーザによって描画された線分図形の形状及び位置から、ロボット25に行わせるべき作業の内容を把握し、把握した内容の作業を行うようにロボット25を制御するシステムとして構成しておく。
(もっと読む)
無線操縦式車両の走行制御方法

【課題】送信機から送信した電波を車両の受信機で受信できなくなった場合に対処できる無線操縦式車両の走行制御方法を提供する。
【解決手段】送信機19から送信した電波により、この電波を受信するラジコン受信機16を搭載した作業機械車両11を無線操縦し、作業機械車両11は、移動しながらGPS受信機17により取得した自身の移動軌跡の位置座標を記録する。送信機19とラジコン受信機16との間で通信用の電波が途絶えたときに、作業機械車両11は、それまでに移動しながら記録した位置座標を逆にたどって、送信機19から送信された電波をラジコン受信機16で受信できる電波到達域A内まで戻る。
(もっと読む)
船舶用位置保持制御装置
【課題】風や潮流等による外乱がある場合にも船舶の定点保持を実現させる。
【解決手段】船舶の船舶座標系での現位置と目標保持位置26との前後方向偏差を位置偏差演算部30で演算し、その演算される前後方向偏差に基づいて、発生させるべき前後方向推進力をPID制御演算部32において演算する。また、船舶の船舶座標系での現位置と目標保持位置26との横方向偏差を位置偏差演算部30で演算すると共に、船舶に作用する外乱の方向を外乱推定演算部34で推定し、その演算される横方向偏差及び推定される外乱の方向に基づいて、発生させるべき回転方向モーメントを演算する。
(もっと読む)
自律移動ロボットの動作計画装置、方法、プログラム及び記録媒体並びに自律移動ロボットの動作制御装置及び方法
【課題】より安全で、より動作計画が破綻しづらい自律移動ロボットの動作計画を行う。
【解決手段】衝突判定部4が、互いに異なる複数の一時的な流れが生じた場合に、各状態にある上記自律移動ロボットが各行動に基づいて移動した場合に障害物に衝突するかどうかを判定する。衝突確率計算部6が、衝突すると判定された一時的な流れが生じる確率の総和である衝突確率を計算する。報酬決定部7が、衝突確率を考慮して報酬を決定する。動的計画部2が、報酬に基づいて動的計画を行う。
(もっと読む)
リモートコントロール装置
【課題】ジョイスチックでコントロールするリモートコントロール走行体の走行に関して、操縦器と走行体の位置関係による角度誤差を少なくすること、制御可能な角度範囲をひろげる。
【解決手段】操縦器1から見た走行体2の位置の方位γと、操縦器1から見た走行体2の向きβ、操縦器1の操縦による目標角αを得て、これらのデータα、β、γを演算した値で走行体2の向き変更駆動手段を駆動する。それによってすべての位置関係で正確な制御ができるようになる。
(もっと読む)
無人移動体システム
【課題】高い移動速度であっても、無人移動体の移動を容易確実に指示できるようにする。
【解決手段】無人移動体Bと、表示部と、これに表示された画像に基づいて、無人移動体Bを遠隔操作する遠隔操作装置Cとを有しており、遠隔操作装置Cには、無人移動体Bを旋回させようとする旋回位置と、この旋回位置における移動方向に対応付けた操作用アイコンを、表示部の画像の指示位置に重畳設定することによる移動指示を行う走行指示手段を設け、遠隔操作装置Cには、走行指示手段によって指示された旋回位置と、この旋回位置における移動方向に基づき、自律移動のための移動経路を計画する経路計画手段と、移動経路に応じた無人移動体の移動速度を計画する速度計画手段と、計画した移動経路と移動速度に従って無人移動体Bを移動させる自律移動手段とを設けている。
(もっと読む)
無人移動体システム
【課題】高い移動速度であっても、無人移動体の移動を容易確実に指示できるようにする。
【解決手段】
移動領域内の測距データを取得するための測距部、及び移動のための駆動機構を搭載した無人移動体と、その測距部によって取得した測距データに基づく移動領域の画像を表示する表示部、及びその表示部に表示された移動領域の画像に基づいて、無人移動体を遠隔操作する遠隔操作装置とを有する無人移動体システムにおいて、無人移動体を移動させるための複数の移動用パラメータのうち、いずれか一つのパラメータによる移動指示を行う移動指示手段を遠隔操作装置に設けたこと、移動指示手段によって指示された移動用パラメータに基づき、駆動機構によって無人移動体を自律的に移動させる自律移動手段を無人移動体に設けたことを特徴としている。
(もっと読む)
無人移動体システム
【課題】高い移動速度の場合には自律して移動し、また、低い移動速度のときには遠隔操作できるようにする。
【解決手段】本発明は、撮像部、測距部及び駆動機構を搭載した無人移動体と、表示部、及びその表示部に表示した画像に基づいて無人移動体を遠隔操縦するための、少なくとも移動方向と移動速度を含む操縦情報を送出する遠隔操縦装置とを有し、撮像部により取得した画像データと、測距部で取得した測距データとに基づいて、移動領域内における移動可能エリアを抽出するエリア抽出手段10aと、遠隔操縦装置から送出された操縦情報に基づいて、自律移動のための移動計画を作成する移動計画作成手段10bと、操縦情報に基づく移動可能エリア内における移動の可否を判定する第一の判定手段10cと、移動が可能であると判定したときには、その移動計画に従って、無人移動体を移動させる自律移動手段10dとを有する。
(もっと読む)
水中移動体の制御装置
【課題】水中移動体の位置および姿勢を精度良く制御する水中移動体の制御装置を提供することにある。
【解決手段】指令速度−指令推力変換手段24は、コントローラ13から入力した速度指令値を指令推力へと変換する。PID制御器27は、変換された指令推力と、3軸周りの角速度と3軸方向の加速度から、XYZ方向の推力制御量を算出する。スラスタ推力配分手段28は、XYZ方向の推力制御量を各スラスタが発生するスラスタ推力に変換する。スラスタ推力−モータ電圧変換手段29は、スラスタ推力を各スラスタの駆動モータの指令電圧へと変換し、スラスタ21,22,23に供給し、水中検査装置9を動作させる。初期キャリブレーション手段30は、指令値−指令推力変換手段24とスラスタ推力−モータ電圧変換手段29で用いる変換ゲインを予め同定し、同定した変換ゲインを各手段24,29に設定する。
(もっと読む)
強化された登り機能を備えた二輪式ロボット
ロボットは、二つの車輪の間に配置されたシャーシ内に埋設される電子監視システムを備える。車輪は、本体および複数の接地部を備える。接地部は、一般に、本体の周りに半径方向に沿って配置されると共に、本体の外側部分から、遠位方向に延びている。本体は、一般に、複数の圧縮セルを画定すると共に、実質的に円錐台形状の外面を有する。  (もっと読む)
(もっと読む)
51 - 60 / 130
[ Back to top ]