
国際特許分類[G05D1/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941)
国際特許分類[G05D1/00]の下位に属する分類
二次元の位置または進路の制御 (1,634)
高度または深度の制御 (3)
姿勢制御,すなわちロール,ピッチまたはヨウの制御 (132)
三次元における位置または進路の同時制御 (20)
目標捜索制御 (22)
国際特許分類[G05D1/00]に分類される特許
61 - 70 / 130
搬送車システム
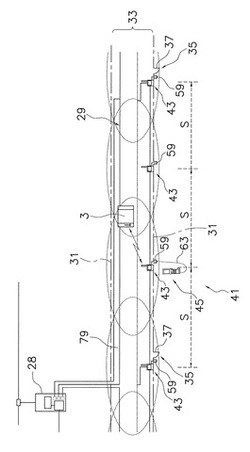
【課題】操作者の安全を確保しつつ、システムを停止することなく搬送車を手動操作可能にする搬送車システムを提供する。
【解決手段】搬送車システムは、操作端末45と、通信装置43と、搬送車3とを備えている。操作端末45は、手動操作が可能である。通信装置43は、操作端末45により操作可能である。搬送車3は、通信装置43とは別体であり、通信装置43を介して操作端末45と通信が可能な無線通信処理部と、操作端末45と直接通信が可能な有線通信処理部とを有する。
(もっと読む)
遠隔操作システムおよび遠隔操作装置

【課題】不慣れな操作者でも移動体を容易に遠隔操作できる遠隔操作システムおよび遠隔操作装置を提供する。
【解決手段】遠隔操作システム10に含まれる遠隔操作装置14のCPU44は、移動体12からの過去情報および最新の移動体情報に基づいて過去情報を選択し仮想視点Vを決定する。CPU44は、グローバル座標系GCに、選択された過去情報に基づいて3次元環境画像Kと仮想視点Vとを生成し、最新の移動体情報と移動体モデルMに関するデータとに基づいて移動体モデルMを生成し、最新の移動体情報と操舵ユニット52からの入力量とに基づいて第1補助モデルM1と第2補助モデルM2とを生成する。そして、CPU44は、3次元環境画像Kと移動体モデルMと第1補助モデルM1と第2補助モデルM2とを仮想視点Vから切り出し中心点Q方向に透視投影して合成画像を生成し、当該合成画像をモニタ36に表示する。
(もっと読む)
無人ボート自動観測システムおよび無人ボート自動観測方法
【課題】観測航路を自動的に生成しその観測航路下の水中または水底の様子を自動的に観測できるようにする。
【解決手段】観測航路を生成するために基準観測線を入力し(S1)、前記基準観測線を一定の距離平行移動させることによって複数の観測航路を生成し(S2)、生成された複数の観測航路の距離を確定させると同時に確定させた観測航路の航行順序を指示し(S3)、指示された航行順序にしたがって無人ボートを航行させ(S4)、航行中に少なくとも水中または水底の様子のいずれかを観測し(S5)、観測されている少なくとも水中または水底の様子を表示するとともに記憶させる(S6)。
(もっと読む)
清掃装置
【課題】簡単な操作で清掃装置を回収位置まで誘導することができるようにする。
【解決手段】水中において床面を走行しながら清掃する清掃装置本体1と、清掃装置本体1を遠隔操作する無線式の遠隔操作手段2とを備える清掃装置であって、遠隔操作手段2は、清掃装置本体1に設けられる少なくとも2つの受信部11,11と、各受信部11,11から離れた位置で、各受信部11,11に所定の超音波を送信する送信機12とを備え、清掃装置本体1は、送信機12から送信される超音波を各受信部11,11が受信したときに、各受信部11,11で受信された超音波の受信情報が異なる場合に、各受信情報が等しくなるように方向転換をするとともに、各受信部11,11の受信情報が等しくなったときに、その進路が送信機12に向くように構成される。
(もっと読む)
自走移動体及び自走移動体の目的位置設定方法
【課題】
荷降ろしを行う際の車体の停止位置と姿勢とを、実際の環境内で教示可能な搬送車の構築を目的とする。
【解決手段】
ユーザが、ジョイスティックを用いて搬送車を操縦し、搬送車に備わるレーザー距離センサにより得られる環境の幾何データと、荷降ろし位置の設定に相当するジョイスティックのボタン押し下げのデータとを収集していく。これにより得られる時系列の幾何データをマッチングしていくことで、センサによる計測開始時を基準として各幾何データの位置・姿勢が求められる。この各幾何データについて、荷降ろし位置設定に相当するボタンの押し下げデータと関連付けられているかを調べ、関連付けられている場合はその幾何データの位置と姿勢を搬送車の荷降ろし位置・姿勢として算出する。
(もっと読む)
遠隔操縦システム
【課題】高い移動速度においても、移動体の遠隔操作を直感的にかつ的確に行なえる。
【解決手段】本発明の遠隔操縦システムは、移動領域の画像を取得する撮像部を搭載した移動体と、取得した画像を表示する表示部33、及びその表示部33に表示された画像に基づいて移動体を遠隔操縦するための操縦部を備えた遠隔操作装置Cとの間における通信遅延時間を推定する遅延時間推定手段31aと、移動領域の画像を取得した時刻から所要時間経過後までの移動体の走行予定経路、移動速度及び推定遅延時間に基づいて、移動体が遠隔操縦装置Cによって操縦制御される時刻における移動体位置を推定する移動体位置推定手段31bと、推定した移動体位置に対応する旋回操作基準点、及び操縦部から送出される操縦情報に基づく移動経路指示曲線を表示部に表示されている画像に重畳表示する重畳表示手段31cとを設けている。
(もっと読む)
移動体遠隔制御システム
【課題】 走行中の移動体の現在位置を精度良く制御できると共に、移動体の位置がGPS電波の受信可能な地域や基準局との送信可能な地域に制限されることなく、リアルタイム性が良好であって低コスト化が実現でき、実用性の良好な移動体遠隔制御システムを提供することを目的とする。
【解決手段】 移動体の移動動作を遠隔から駆動制御する移動体遠隔制御システムにおいて、移動体とは離間して所定の位置に配置され、第1カメラ及び第2カメラを介して移動体をステレオ撮影して移動体の三次元座標を検出するカメラ制御装置100と、検出された移動体の三次元座標を予め設定されて経路データ記憶部16に記憶された移動経路と比較し、移動体が移動経路に沿って移動するように、移動体の移動動作を駆動制御する第1運転制御部12と、を備える。
(もっと読む)
監視方法
【課題】警戒監視によって識別した追尾対象を移動ロボットで継続して追尾することが可能な監視方法を提供する。
【解決手段】
移動ロボット10に搭載するカメラとして、光学的ズーム機能を有する監視用カメラ11と操縦用カメラ12を用い、監視用カメラ11を広範囲視野の警邏状態にしてラスタースキャンしながら、操縦用カメラ12からの映像に基づいて移動ロボット10を走行させる警邏行動と、警邏行動中において、監視用カメラ11からの広範囲視野映像内に識別対象物A,Bを発見した際に監視用カメラ11を狭範囲視野の監視状態にして識別対象物A,Bをクローズアップする識別行動と、識別行動において、識別対象物A,Bが追尾対象であると識別した際に監視用カメラ11を狭範囲視野の監視状態に保ちながら、操縦用カメラ12からの映像に基づいて移動ロボット10を走行させて追尾対象を追尾する追尾行動を行う監視方法。
(もっと読む)
走行車
【課題】手動操作モードでの調整、メインテナンス等の作業の安全性向上を図ることができる走行車を提供する。
【解決手段】手動操作モードと自動走行モードのいずれであるかを判定する走行モード切替・判定部32と、リモコンからの信号を受信するリモコン信号受信部5a〜5dと、走行車の走行速度を制御する走行方向・速度制御部33とを備え、前記走行方向・速度制御部33は、手動操作モードにおいて、走行車が前記リモコンからの信号を受け付けた方向に進む場合には、他の方向に進む場合よりも前記走行車の走行速度を減速するように制御する。
(もっと読む)
模型船試験装置
【課題】装置構成が簡素で、航行計画の変更が遠隔操作で可能な模型船試験装置を提供する。
【解決手段】陸上3のパソコンから無線LANを介して模型船2上のパソコンを操作して模型船2上のパソコンに航行計画を設定すると共に、模型船2上のパソコンに設定されている航行計画や模型船2上のパソコンが収集した計測データを陸上3のパソコンに送信し、その計測データを陸上3のパソコンで表示できるようにした。
(もっと読む)
61 - 70 / 130
[ Back to top ]