
国際特許分類[G05D1/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941)
国際特許分類[G05D1/00]の下位に属する分類
二次元の位置または進路の制御 (1,634)
高度または深度の制御 (3)
姿勢制御,すなわちロール,ピッチまたはヨウの制御 (132)
三次元における位置または進路の同時制御 (20)
目標捜索制御 (22)
国際特許分類[G05D1/00]に分類される特許
71 - 80 / 130
船舶用自動操舵装置
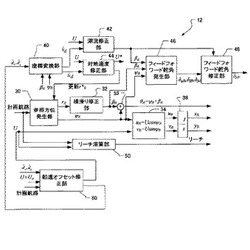
【課題】船体の旋回時の横滑り特性及び/または潮流成分を考慮することによって、計画旋回の軌跡に乗せることができる船舶用自動操舵装置を提供する。
【解決手段】計画航路に従う旋回を行うための参照方位ψRを発生する参照方位発生部30と、参照方位ψRの時間微分である参照角速度rRから舵を切ることによって発生する旋回角速度に対応する参照斜航角βRを求める横滑り修正部32と、推定器で推定された潮流成分を、参照方位発生部で出力する参照方位に基づき座標変換を行って潮流の船体の横方向成分を求める座標変換部40と、該座標変換部40で座標変換された横方向成分から潮流に対抗する修正斜航角βdを求める潮流修正部42と、旋回時に参照方位、参照斜航角βR及び修正斜航角βdに基づき、修正されたフィードフォワード舵角を発生するフィードフォワード舵角発生部46とを備える。
(もっと読む)
電力供給ステーション及びその電力供給制御方法

【課題】感電の危険性を伴うこと無く、移動型ロボットへの電力供給を行うことが可能な電力供給ステーションを提供する。
【解決手段】電力供給ステーション100を、電力供給部110と、移動型ロボットが有する複数の受電用端子にそれぞれ対応して設けた電力供給用端子120a〜120cと、供給部110−端子120a〜120c間の導通状態と非導通状態とを切り替えるスイッチ部130と、前記移動型ロボットへの電力供給に際して、前記受電用端子による端子120a〜120cに対する全ての押圧力が一定範囲内に収まる第1の条件、端子120a〜120cの全ての押圧タイミングが一定時間内に収まる第2の条件、及び前記受電用端子の入力インピーダンスがそれぞれ所定範囲内の値である第3の条件の少なくとも2つが成立した場合に、供給部110と端子120a〜120cとが導通状態となるようスイッチ部130を制御する制御部140とで構成する。
(もっと読む)
遠隔制御装置
【課題】被遠隔制御対象体を直感的かつ容易に遠隔制御できる遠隔制御装置を提供する。
【解決手段】遠隔制御装置1は、自走車100とコントローラ200と演算部140,240とを備え、自走車100は、第1の方位基準点101に対する第2の方位基準点102の方位を検知するための方位センサ120を有し、コントローラ200は、第3の方位基準点201に対する第4の方位基準点202の方位を検知するための方位センサ220と、第3の方位基準点201を基準として、自走車100を移動させる移動方向を演算部240に入力するための操作用レバー260とを有し、演算部140,240は、方位センサ120によって検知された方位と、方位センサ220によって検知された方位と、操作用レバー260によって入力された移動方向とに基づいて、自走車100を、第1の方位基準点101を基準として移動方向に向かって移動させるように制御する。
(もっと読む)
点検システム、移動体、操作装置、及び点検プログラム
【課題】建築物の閉空間を点検する場合に、移動体の進行方向を積算によって得ることで生じる累積誤差を精度良く補正可能な点検システムを提供する。
【解決手段】床下点検システムは、移動体のヨー角方向における角速度Δγを積算することによって移動体の進行方向を検出する方向検出部310と、閉空間内の天井に存在する部材である天井部材(例えば、大引/根太)を検出する天井部材検出部と、天井部材検出部による検出結果を用いて、進行方向検出部310が角速度Δγを積算することによって生じる累積誤差を補正する誤差補正部320とを備える。
(もっと読む)
無人ビークル制御ステーション
ある実施形態によれば、制御ステーションは単一位置から見ることのできるヘッド・ダウン・ディスプレイおよび少なくとも一つのヘッド・アップ・ディスプレイを含む。ヘッド・ダウン・ディスプレイは無人ビークルを制御するよう動作可能な無人ビークル制御システムに結合されている。少なくとも一つのヘッド・アップ・ディスプレイはヘッド・ダウン・ディスプレイに隣接し、無人ビークルを取り巻く環境の合成画像を表示するよう動作可能である。合成画像は地形レンダリング・エンジンによって生成されるレンダリング画像を含む。  (もっと読む)
(もっと読む)
床下点検システム、操作装置及び床下点検プログラム
【課題】床下移動体に搭載された撮像装置によって撮像された撮像対象物の位置をユーザが確認可能とする。
【解決手段】床下点検方法は、床下空間内における移動体の所在位置を検出する検出ステップS103と、床下空間の平面図を表示するとともに、検出された所在位置を平面図上に表示する表示ステップS103と、表示される平面図上で、撮像装置が撮像する撮像対象物の位置を指定する指定操作をユーザから受付ける受付けステップS105、ステップS106と、指定操作を受付けた場合、撮像装置によって得られた画像データと、指定操作によって指定された位置を示す撮像位置情報とを関連付けて保存する保存ステップS112とを備える。
(もっと読む)
移動ロボット及び遠隔操作システム
【課題】移動ロボットの方向検知に使用する積算型センサの累積誤差を補正し、移動ロボットの向いている方向を容易に且つ高精度に検出する。
【解決手段】床面上における前記移動ロボットのヨー角方向の回動角を算出する積算型センサ(角速度センサ141,回動角算出部104,誤差補正部107,方位情報記憶部151)と、段差部の側面と上面によって共有されたエッジ部の延びる方向の向きに対する移動ロボットの進行方向、又は上面の存在情報を検出する段差検出部106と、検出されたエッジ部の延びる方向の向き、この向きに対する移動ロボットの進行方向、又は上面の存在情報に基づき移動ロボットの向いている方向を検出する補正角度算出部105とを備え、積算型センサには、補正角度算出部105において検出された移動ロボット1の向いている方向を用いて回動角に含まれる累積誤差を補正する誤差補正部107が含まれる。
(もっと読む)
搬送車用の送信機
【課題】作業者の操作性を損なわせることなく、作業者の意思をより確実に反映させた状態で搬送車に対し走行の指示を行うこと。
【解決手段】有人運転モード及び無人運転モードの何れかで走行可能な牽引車に対し、無人運転モード時に遠隔操作によって走行を指示する送信機に、走行指示を行う際に操作する連続走行ボタン28a及び寸動走行ボタン28cと、これらのボタン操作を有効とするために操作する走行開始ボタン28dを設ける。そして、走行開始ボタン28dが操作されてから有効時間T1が経過する迄に連続走行ボタン28a又は寸動走行ボタン28cが操作されると、走行指示信号を送信する。また、有効時間T1の経過時迄に連続走行ボタン28a又は寸動走行ボタン28cが操作された場合、以降はこれらのボタン操作が終了してから有効時間T2が経過する迄に再びボタン操作されることにより走行指示信号を送信する。
(もっと読む)
ロボットクローラのための可変プリミティブマッピング
高レベル(オペレータ入力)プリミティブ42、64から低レベルプリミティブ46、70への可変マッピングを用いることによって、ロボットクローラ10の種々の動作モードが与えられる。そのマッピングは、ロボットクローラ10によって検知される環境データ74、94の関数であり、それにより、動作モードを環境に合わせることができるようになる。 (もっと読む)
ロボット位置検出システム
【課題】 床下点検システム等に用いられるロボット位置検出システムにおいて、位置検出の演算速度を向上させる。
【解決手段】
位置検出システムのロボット10は、走行体11と、走行体11に回動可能に搭載されたカメラ12と、ロボットと水平方向に対峙する固定対象物までの距離を複数方向で測定する距離計13とを有している。遠隔制御装置20のディスプレイ22は、カメラ12からの映像を表示し、かつ固定対象物の位置情報を含むマップデータに基づいてマップを表示する。遠隔制御装置20のパソコン21は、ディスプレイ22に表示されたマップにおいて、探査エリアを指定するとともに、ロボットの現在位置が探査エリアにあるとの条件で、距離計13からの複数方向の測定距離情報と上記マップデータに基づき、現在のロボット位置を演算し、このロボット位置をディスプレイ22に表示させる。
(もっと読む)
71 - 80 / 130
[ Back to top ]