
国際特許分類[G05D1/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941)
国際特許分類[G05D1/00]の下位に属する分類
二次元の位置または進路の制御 (1,634)
高度または深度の制御 (3)
姿勢制御,すなわちロール,ピッチまたはヨウの制御 (132)
三次元における位置または進路の同時制御 (20)
目標捜索制御 (22)
国際特許分類[G05D1/00]に分類される特許
121 - 130 / 130
移動経路地図作成方法
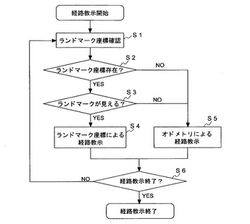
【課題】 計算負荷が小さく、簡単な操作で以って移動経路地図を作成することができ、且つ精度が高く、いかなる走行環境下であっても確実に移動経路地図を作成することのできる移動経路地図作成方法を提供する。
【解決手段】 移動体の走行環境内にて該移動体を移動させながら移動経路上の移動体の位置座標を節点として教示し、隣接する節点同士を連結して移動経路地図を作成する移動経路地図作成方法であって、走行環境の上方に前記移動体の自己位置標定に用いられる複数のランドマークが配置され、前記移動体から撮像されたランドマーク画像を基に移動体の位置座標を測定し、該位置座標を前記節点として登録するようにし、前記移動体にて前記ランドマーク画像による自己位置標定が困難な走行環境下では、前記移動体を任意の距離移動させたときの移動状態量(オドメトリ)を基に該移動体の位置座標を測定するようにした。
(もっと読む)
自動シャットオフ機能を備えるモバイル・ビデオ会議プラットフォーム
ロボットと遠隔制御ステーションとを含む、遠隔制御されたロボット・システム。ユーザは遠隔制御ステーションからロボットの動きを制御できる。遠隔制御ステーションは、広帯域ネットワークを介して送信されるロボット制御指令を発生させることが可能である。ロボットは、ネットワークを介して遠隔制御ステーションに送信されるビデオ画像を作成するカメラを有する。ユーザは、ロボット・カメラによってもたらされたビデオ画像を見ながら、ロボットの動きを制御することができる。ロボットが時間間隔の間にロボット制御指令を受信しない場合、ロボットは自動的に動きを停止できる。遠隔制御ステーションが時間間隔内に更新されたビデオが画像を受信しない場合、ステーションは停止指令をロボットに送信することができる。  (もっと読む)
(もっと読む)
災害救助ロボット、及び災害救助支援システム

【課題】 居室内に予め設置され、平常時にインターフォンとして機能し、災害時に災害救助機能を有する災害救助ロボットを利用した災害救助支援システムを提供することを課題とする。
【解決手段】 支援システム1は、複数の居室9にクローラ機構部をコンパクトに格納した状態で設置された複数のロボット2と、該ロボット2と無線通信ネットワーク10を介して種々の情報を送受可能に形成され、災害の発生時には、ロボット2を遠隔制御し、居室9に取り残された要救助者11の探索及び発見に利用可能な支援コンピュータ3とによって主に構成されている。ここで、平常時及び災害時に取得され、支援コンピュータ3に記憶された居室情報20等を利用し、要救助者11の早期の発見が可能となる。
(もっと読む)
車両駐車装置及び車両駐車方法
【課題】簡素な装置構成によって駐車目標位置に車両を駐車させる。
【解決手段】制御部8が、車両の駐車目標位置と、車両の駐車目標位置から運転者の降車位置までの間の車両の走行軌跡とをそれぞれ駐車位置記憶部3及び走行軌跡記憶部4に記憶し、リモートコントローラ9から制御信号を受信した際、記憶されている走行軌跡に沿って車両を駐車目標位置に移動させる。これにより、複雑な演算処理を行う必要性が無くなり、演算負荷を低減させることができるので、簡素な装置構成によって駐車目標位置に車両を駐車させることができる。
(もっと読む)
スタンプ式マーキング装置
【課題】遠隔操作される無人の建設機械により土砂掘削線等のマーキングポイントにマーキングを行う場合に、従来のようなノズル詰まり等が無くマーキングを常に確実に行え、また建設機械の移動によるマーキング装置の振れを短時間に確実に抑止できるスタンプ式マーキング装置を提供する。
【解決手段】昇降ロッドの下端に、マーキング材を染み込ませたスポンジ等のスタンプ部を設けたスタンプ式マーキング装置2をバックホウ等の建設機械のアーム先端に設けられた支持部8にXYテーブル25と鉛直を保持するジンバル機構を介して取付け、電動シリンダ等のZ軸シリンダにより昇降ロッドを下降させ、スタンプ部を地面等に押し付けてマーキングを行う。ジンバル機構の回転軸には振れ止めダンパーを接続し、制動により直交2方向の振れを抑制する。
(もっと読む)
ロボット制御システム及びロボット制御方法
【課題】 携帯用無線端末機に設けられたモーションセンサを用いて何れの場所も問わず便利にサービスロボットを制御することのできるロボット制御システム及びロボット制御方法を提供する。
【解決手段】 本発明に係るロボット制御システムは、インターネットと接続され映像信号及び/または制御信号を送受信する無線共有器と、前記無線共有器から受信された指示に従って自走しつつ指示された作業を行ない無線通信モジュールが設けられたロボットと、モーションセンサを備え、インターネットと接続され前記無線通信モジュールに作業内容を無線送信したり映像信号及び/または制御信号を受信する携帯用無線端末機と、インターネットと接続され前記ロボットの制御画面及び前記ロボットから受信された映像信号及び/または制御信号を前記携帯用無線端末機に出力するロボットサーバとを含む。
(もっと読む)
移動体の遠隔操作支援方法及びシステム
【課題】 遠隔操作者が移動体の走行環境に関する情報を予め知らない場合においても、移動体周囲の状況を正確に把握し、容易に遠隔操作を行なうことを可能とする。
【解決手段】 周囲の画像情報を取得する撮像装置と、障害物までの距離を検出する距離検出センサとが搭載され、遠隔操作部の遠隔操作により移動する移動体の遠隔操作を支援する方法において、前記距離検出センサにより取得した障害物情報より2次元の障害物マップ104を生成する障害物マップ生成プロセスと、前記撮像装置により取得した画像情報100に前記障害物マップから抽出した移動体の移動可能領域情報を重畳処理する重畳処理プロセスと、を備え、前記画像情報と前記重畳処理された前記移動可能領域情報とを同一の画面上に表示する。
(もっと読む)
浮遊移動体の制御システム
この発明の目的は、波浪や潮流等による外乱下にあっても、浮遊移動体を所定位置に精度良く静止させたり、或いは目標軌道に精度良く追従させたりすることが可能な浮遊移動体の制御システムを提供することにある。
上記目的を達成可能な本発明の浮遊移動体の制御システムは、浮遊移動体10の制御システム1であって、上記浮遊移動体が、浮遊移動体の一部を占める、単一剛体とみなし得る本体部Bと、浮遊移動体に対して推力を発生する効果器部Eと、本体部と効果器部を力学的に結合する部分であり、効果器部から本体部に作用する推力を実測できるよう構成された推力伝達ゲートGとからなっており、上記推力伝達ゲートGからの推力測定値を用いて効果器部Eに対する推力指令を得る様にしたことを特徴とするものである(図4)。
(もっと読む)
遠隔操作型作業用ロボット
【課題】 装置構成が簡単で装置コストが低く、操作が簡単で誤操作を起こし難い、床下等の狭・暗・閉所で操作者が直接ロボットを視認できない箇所での点検・診断・薬液散布等各種作業を、モニターで車体前進方向を監視しつつ遠隔操作で安全・確実に実施可能な遠隔操作型作業用ロボットを提供する。
【解決手段】 遠隔操作ボックスに設けた自動中立位置復帰型の、第1スティックT1の操作による電動自走車体操作・移動制御手段、第2スティックT2の操作による電動水平回転基盤操作・制御手段と電動上下回動ヘッド操作・制御手段、前進時自動的に又は水平回転モード第1切替スイッチS5の切替操作でTVカメラが車体前進方向を向くよう制御するTVカメラ第1前向き復帰・固定手段15と、上下回動モード切替スイッチS2の切替操作でTVカメラが車体前部の一部を撮像可能な上下定方向へ向くよう制御するTVカメラ上下定方向復帰・固定制御手段16を設けることを解決手段とする。
(もっと読む)
コンテナターミナルシステム
【課題】 コンテナヤード内を自動化して、コンテナターミナルの生産性向上や効率アップを図るために、外部車両のコンテナヤード内への進入を防止する。
【解決手段】 コンテナヤード11と外部車両30が走行可能な境界には、境界構築物18を設置する。外部車両30の進入を物理的に阻止したコンテナヤード11内には、AGV19を自動運転させ、無人でコンテナ10の平面的な移動を行わせる。受渡しエリア17には運転台24から作業者によって人手または部分的自動運転併用で運転される受渡しクレーン20を設け、AGV19と外部車両30との間でのコンテナ10の受渡しを行う。コンテナヤード11に積上げられたコンテナ10とAGV19との間のコンテナ10の受渡しは、トランスファクレーン12によって自動的に行う。AGV19は、船舶にコンテナを積降ろしするためのコンテナクレーンとの間のコンテナ10の移動も行う。
(もっと読む)
121 - 130 / 130
[ Back to top ]