
国際特許分類[G05D1/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941)
国際特許分類[G05D1/00]の下位に属する分類
二次元の位置または進路の制御 (1,634)
高度または深度の制御 (3)
姿勢制御,すなわちロール,ピッチまたはヨウの制御 (132)
三次元における位置または進路の同時制御 (20)
目標捜索制御 (22)
国際特許分類[G05D1/00]に分類される特許
41 - 50 / 130
無人車両遠隔操作システム
【課題】操作者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】本発明は、走行領域内の測距データを取得するための測距部により取得した測距データに基づいて、走行可能エリアを抽出するエリア抽出手段10aと、無人車両の走行状態を取得する走行状態取得手段10bと、取得した無人車両の走行状態と、抽出した走行可能エリアとに基づいて、走行のための操作限界を示す操作限界情報を生成する操作限界情報生成手段10cとを無人車両に設ける一方、生成した操作限界情報を表示部に表示させる操作限界情報表示手段を遠隔操作装置に設けている。
(もっと読む)
半自律型無人車両の遠隔操縦システム

【課題】操縦者の意図した通りの高速走行を、安全に行うことができるようにする。
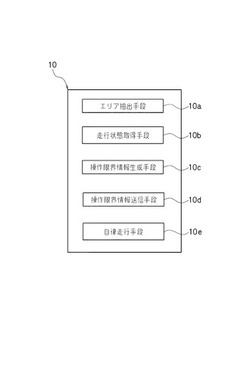
【解決手段】測距データに基づいて走行可能エリアを抽出するエリア抽出手段10aと、走行状態を取得する走行状態取得手段10bと、走行状態と走行可能エリアとに基づき、操縦限界を示す操縦限界情報を生成する操縦限界情報生成手段10cと、操縦限界情報を遠隔操縦装置に向けて送信する操縦限界情報送信手段10dと、操縦限界情報に基づき制限され、かつ、遠隔操縦装置から送出された操縦情報に従い、半自律型無人車両を走行させる自律走行手段10eとを半自律型無人車両に設けたこと、操縦限界情報を表示部に表示させる操縦限界情報表示手段と、操縦限界情報に基づき制限された操縦情報を生成する操縦情報生成手段と、電気通信回線を通じ、生成した操縦情報を半自律型無人車両に向けて送信する操縦情報送信手段とを遠隔操縦装置に設けている。
(もっと読む)
水中航走体の自律制御方法及び自律制御型水中航走体
【課題】 巡回経路上に障害物が存在していても、緊急回避動作回数を低減させる。
【解決手段】 ウェイポイント制御により巡回経路に沿って設けた各ウェイポイントを巡回させる自律制御型水中航走体が、1つのウェイポイントの場所から次に辿る順序のウェイポイントの場所を目標地点として移動する経路上で、水中航走体に装備した障害物検出ソナーにより経路上の障害物が検出されると、水中航走体を障害物のない方向へ移動させる緊急回避動作を行い、回避終了時の水中航走体の位置に、巡回経路の次の周回以降に経由させるための新たなウェイポイントを追加する。これにより、障害物が検出された周回の次の周回以降は、水中航走体を、追加されたウェイポイントを経由させることで、障害物に差し掛かることなく巡回させる。
(もっと読む)
無人走行車両の遠隔操縦装置
【課題】テレビカメラの映像を利用して無人走行車両を遠隔操縦する場合に、テレビカメラの映像信号の伝送遅れによる操縦への悪影響を低減する。
【解決手段】無人走行車両1に取り付けられたテレビカメラ2からの前方視界の映像信号と各種センサ3からの車両1の走行情報信号を無線により車外の操縦席5に伝送し、このうち信号の容量が非常に多いため伝送遅れが生じた映像信号を、画像処理装置7によって信号の容量が少なく伝送遅れを無視できるリアルタイムの走行情報信号に基づき補正し、遅れのない本来の画像に相当する画像を推定して抽出し、操縦席5にあるテレビモニタ8に表示する。
(もっと読む)
ロボット制御システム及びロボット制御プログラム
【課題】物体の搬送作業を行えるロボットを好適に制御できるロボット制御システムを、提供する。
【解決手段】カメラ画像が表示されているタッチスクリーン上の或る範囲を指定する操作が行われた場合、カメラ画像に対する画像セグメンテーション処理結果を利用して、カメラ画像中の、ユーザが指定した範囲内に所定割合以上の部分が含まれているセグメント群からなる画像を探索し、探索した画像を、搬送対象物の画像として特定(S102)し、特定した画像に基づき搬送対象物をロボットに搬送させる制御処理(S110)を行う。
(もっと読む)
遠隔協調輸送手段のためのシステムおよび方法
輸送手段システムを制御するための方法およびアーキテクチャシステムを開示する。一実施形態において、輸送手段を遠隔制御する方法は、輸送手段の位置を推定することを含む。位置推定アルゴリズムは、輸送手段の位置を推定することができる。輸送手段から受信された位置データパケットを用いて、輸送手段の推定位置を更新できる。表示装置は、更新された輸送手段の推定位置に基づいて輸送手段の仮想表現を表示してもよい。表示された輸送手段の仮想表現に基づいて、コマンド信号を輸送手段へ伝達してもよい。  (もっと読む)
(もっと読む)
遠隔操作システム及び遠隔操作方法
【課題】容易にロボット装置を最適な移動目標位置へ移動させ、操作内容を実行させることができる遠隔操作システム及び遠隔操作方法を提供すること。
【解決手段】ロボット装置を遠隔操作するための遠隔操作システムは、ロボット装置周辺を撮影する撮影手段と、撮影手段により撮影された撮影画像を表示する表示手段と、表示手段に表示された撮影画像上において、目標対象物に対する指示を入力する入力手段と、入力手段により入力された撮影画像上における目標対象物の指示方法に基づいて、ロボット装置を移動させる移動目標位置と、移動目標位置における前記ロボット装置の操作内容と、を推測する推測手段と、推測手段により推測された移動目標位置へロボット装置を移動させると共に、操作内容を実行させるための指令値を生成する指令値生成手段と、を備えている。
(もっと読む)
遠隔操縦システム
【課題】移動体と遠隔操縦装置を備えた遠隔操縦システムにおいて、移動体の遠隔操縦性を高める。
【解決手段】オンボードカメラ14を搭載した無人車両Bと、画像を表示する表示部33、及び遠隔操縦するための操作部36を備えた遠隔操縦装置Cを有する遠隔操縦システムにおいて、遠隔操縦装置Cが、受信処理手段31aとデータ処理手段31cとの間に、受信処理手段31aからのデータを蓄積し且つデータ処理手段31cへ出力するデータを所定時間遅延させるFIFOバッファメモリ31bを備えた構成としたことにより、無人車両Bからのデータの受信遅れ時間に変化が生じた場合でも、表示部33の画像が急激に変化するような事態を防いで、無人車両Bの遠隔操縦性の向上を実現した。
(もっと読む)
移動体及びその制御方法
【課題】操作意図を反映させて移動させると共に、障害物との衝突を自律的に回避させて移動させる。
【解決手段】移動体は、移動装置21を用いて移動環境内を移動する。移動体は、移動環境に存在する障害物を検出する障害物検出部26と、移動環境内の所定の基準位置を原点とするグローバル座標系において、入力される操作情報に応じた通過点制御量を算出し、その通過点制御量を用いて制御される前記移動体との相対方向に沿って、自己位置から所定の距離離れた地点に通過点を設定する通過点設定部27と、設定した通過点へと到達するための移動動作を計画すると共に、障害物検出部26により進行方向前方に障害物を検出した場合には、その障害物を回避するための移動動作を自律的に計画する動作計画部23と、計画した移動動作に基づいて、移動装置21を制御する移動制御部24と、を備える。
(もっと読む)
遠隔操作装置
【構成】遠隔操作装置10は、LRF12a,12bを含み、LRF12a,12bと同じ場所に設けられるロボット14を遠隔操作する。遠隔操作装置10はLRF12a,12bを利用して検出領域(E)内に居る人間の局所行動を検出し、その局所行動を記録する。検出領域(E)内は空間グリッド化され、その空間グリッド毎に局所行動のヒストグラムが算出される。遠隔操作装置10は、ヒストグラムから算出される類似度に基づいて空間グリッドをクラスタリングして、クラスタリング地図をLCD(22)に表示する。表示されたクラスタリング地図に含まれる任意のエリアが選択されると、ロボット14には、選択されたエリアの属性に基づいて決まる動作命令と、座標情報とが付与される。
【効果】使用者は、複数の人間の行動が視覚的に示されるクラスタリング地図を参照して、ロボット14を遠隔操作することができる。
(もっと読む)
41 - 50 / 130
[ Back to top ]