
国際特許分類[G05D1/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941)
国際特許分類[G05D1/00]の下位に属する分類
二次元の位置または進路の制御 (1,634)
高度または深度の制御 (3)
姿勢制御,すなわちロール,ピッチまたはヨウの制御 (132)
三次元における位置または進路の同時制御 (20)
目標捜索制御 (22)
国際特許分類[G05D1/00]に分類される特許
31 - 40 / 130
水中航走体の航走制御方法及び装置
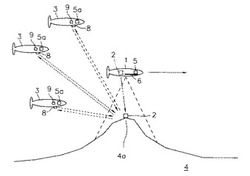
【課題】 複数の水中航走体に装備する音響スキャンソナーの数を低減させる。
【解決手段】 音響スキャンソナー6を備え、位置表示装置2を搭載して航走できるようにした位置特定用水中航走体1と、位置表示装置2に対する相対位置を検出するための相対位置検出装置8を有する被誘導用水中航走体3を形成する。先ず、位置特定用水中航走体1を航走させて音響スキャンソナー6により海底4の特定位置4aを正確に検出させて、そこに位置表示装置2を設置させる。その後、被誘導用水中航走体3を航走させるときに、相対位置検出装置8により位置表示装置2との相対位置を検出させ、検出された位置表示装置2に向けて航走させることで、被誘導用水中航走体3を海底4の特定位置4aまで正確に到達させる。
(もっと読む)
無人移動体の制御方法

【課題】高速度で移動する無人移動体に対しても、きめ細かい移動方向の指示を迅速且つ簡単に行い得る無人移動体の制御方法を提供する。
【解決手段】移動領域内の画像データを取得する遠隔操縦用カメラ14を搭載した半自律走行車Bの移動を携帯型遠隔操縦装置Aによって制御する方法であって、携帯型遠隔操縦装置Aは遠隔操縦用カメラ14で得た画像を映し出すディスプレー40を有し、携帯型遠隔操縦装置Aのディスプレー40の画像上におけるカーソルスティック51による3点のポイント&クリック操作入力により、半自律走行車Bを旋回させる位置を指示すると共に、旋回位置での旋回方向及び移動距離をベクトルで指示し、半自律走行車B側において、ディスプレー40の画像上で指示した画像座標系の旋回位置及び旋回ベクトルを世界座標系に変換させ、変換後の世界座標系の旋回位置及び旋回ベクトルの指示に従って半自律走行車Bを移動させる。
(もっと読む)
無人車両の半自律走行システム
【課題】走行環境の違いや通信環境の変化に関わらずに、無人車両を適切に走行させられるようにする。
【解決手段】本発明は、走行領域内の測距データを取得するための測距部を有し、この測距部により取得した測距データに基づき自律走行可能な無人車両と、この無人車両と無線通信回線を介して接続され、その無人車両の遠隔操縦を行うための遠隔操縦装置とを有する無人車両の半自律走行システムにおいて、測距部により取得した測距データに基づき、走行領域内の走行環境を評価する走行環境評価手段10cと、走行環境の評価結果に基づいて、無人車両の走行を担う自律走行機能と遠隔操縦との混成割合を決定する混成割合決定手段50aと、決定された混成割合の自律走行機能と遠隔操縦に従って、無人車両を走行させる混成走行手段30aとを有している。
(もっと読む)
無人移動体の制御方法及び遠隔操縦装置
【課題】遠隔操舵部を有する遠隔操縦装置に、他の遠隔操縦装置から操舵主導権を移管するに際して、無人移動体を停止させずに操舵主導権を移管し得る無人移動体の制御方法及び遠隔操縦装置を提供する。
【解決手段】ジョイスティックタイプの遠隔操舵部50及び自律走行車Cの遠隔操縦用カメラ14で得た画像を映し出すディスプレー40を有する遠隔操縦装置Bに操舵主導権を移管するに際して、遠隔操縦装置Bのディスプレー40の画面に、自律走行車Cの操舵範囲SAと、自律走行車Cの実際操舵位置SPと、この実際操舵位置SPに基づいて設定される安全許容範囲SZを表示させると共に、遠隔操縦装置Bにおける遠隔操舵部50の指示スティック51の位置51Aを重ねて表示させ、遠隔操縦装置Bのディスプレー40画面における指示スティック51の位置51Aを安全許容範囲SZ内に入れた状態で、管制局Aから遠隔操縦装置Bへの操舵主導権の移管を許可する。
(もっと読む)
自律移動ロボットシステム
【課題】自律移動ロボットの操作を通じて、高い移動速度や複雑な移動経路であっても、
それらに適応させた移動を次第に行うことができるようにする。
【解決手段】
自律移動ロボットBの移動態様を指示するための指示情報を生成する指示情報生成手段
65cと、生成した指示情報を自律移動ロボットBに向けて送信するための指示情報送信
手段を遠隔操作装置Cに設ける一方、遠隔操作装置Cからの指示情報の入力頻度を算出す
る指示情報入力頻度算出手段70bと、算出した指示情報の入力頻度に基づき、自律移動
ロボットBの自律移動に関わる自律移動用パラメータを変更する自律移動用パラメータ変
更手段70cと、変更した自律移動用パラメータに基づき、駆動機構によって自律移動ロ
ボットBを移動させる自律移動手段10mとを自律移動ロボットBに設けている。
(もっと読む)
対象者検出システム、対象者検出方法、対象者検出装置および移動式情報取得装置
【課題】対象者が固定カメラの検出範囲内に所在する場合のみならず、対象者が固定カメラの非検出範囲に所在する場合を含めて対象者の所在や行動を検出すること。
【解決手段】管理装置は、固定カメラAを用いて対象者のアピアランス情報を検出し、検出したアピアランス情報に基づいて対象者の絞り込みを行う。また、管理装置は、固定カメラAおよび固定カメラBによるアピアランス情報の検出結果を用いて対象者の異常を検知する。そして、管理装置は、対象者の異常を検知すると、固定カメラAおよび固定カメラBの非検出範囲へ移動ロボットを移動させ、移動ロボットを用いて検出した顔情報に基づいて対象者を特定する。
(もっと読む)
接近困難な内部スペースを独立的に検査するための車両
【課題】僅かな所要スペースと良好な操縦可能性を特徴とし、多種の検査形式に適しており、問題なく内壁に沿って任意の空間的方向に動くことができるような、接近困難な内部スペースを独立的に検査するための装置を提供する。
【解決手段】強磁性の内壁24によって制限された接近困難な内部スペース、特に例えば蒸気タービンの蒸気室のような大きなキャスティング部分をセンサ23で検査するための車両10であって、共通の軸14を中心として回転可能な、軸方向で互いに間隔を置いて配置された、互いに独立的に駆動可能な少なくとも2つの車輪12,13を有している形式のものに関し、車両10が永久磁石等の付着手段21,22;25,26を有しており、該付着手段が、車両10を重力に抗して、車輪12,13で各内壁24に保持することにより、全内部スペースを検査することができる。
(もっと読む)
自律移動装置とこれを用いた搬送方法
【課題】複数の積載体(例えば台車)が、互いの隙間を詰めて置かれたり、乱雑に配置されていたりする場合であっても、高度な制御を必要とすることなく、積載体を保持(例えば連結)でき、かつ、所望の搬送先へ自律移動できる自律移動装置を提供する。
【解決手段】搬送物が積載される積載体1を保持した状態で自律移動することで該積載体を搬送する自律移動装置10。積載体1と分離した状態から該積載体を保持可能な保持機構3と、所望の搬送先へ保持機構3を移動させる移動機構5と、受動モードと自律モードとの間で切換可能な制御部7と、を備える。制御部7は、受動モードにある時に、外部からの動作指令に従って保持機構3と移動機構5を動作させ、自律モードにある時に、移動機構5を自律制御して所望の搬送先へ保持機構3を移動させる。
(もっと読む)
半自律型無人車両の遠隔操縦システム
【課題】簡単な操作によって高速走行を行うことができるとともに、走行の可否判別できない領域と識別されたときにも必要に応じて進入走行することができるようにする。
【解決手段】半自律型無人車両Bにおいては、走行可否識別不能領域a2への進入の許可情報を受信したときには、走行可能領域a1及び進入が許可された走行可否識別不能領域a2内における走行経路を生成して走行するとともに、走行可否識別不能領域a2を含む走行領域の画像を遠隔操縦装置に向けて送信する。一方、遠隔操縦装置では、走行可否識別不能領域a2を含む走行領域の画像を表示部に表示するとともに、走行可否識別不能領域a2への進入が許可されたか否かを判定し、走行可否識別不能領域a2への進入を許可されたと判定したときには、走行可否識別不能領域a2への進入の許可情報を半自律型無人車両に向けて送出する。
(もっと読む)
半自律型車両の遠隔操縦システム
【課題】所期の走行経路から外れて走行したときにも、所期の走行経路に容易に復帰できるようにする。
【解決手段】本発明は、測距部11,12、撮像部13及び走行機構Dを有し、自律走行と遠隔操縦可能な半自律型車両と、測距部11によって取得した画像を表示する表示部、及びその表示部に表示された画像に基づき半自律型車両の操縦コマンドを送出する遠隔操縦装置とを有する半自律型車両の遠隔操縦システムであって、操縦コマンドの受信が中断したか否かを判定するコマンド受信中断判定手段10aと、当該中断判定したときの受信中断位置情報を取得する中断位置情報取得手段10bと、自律走行を行わせる自律走行手段10cと、操縦コマンドの受信が再開したか否かを判定するコマンド受信再開判定手段10dと、受信再開位置情報を取得する再開位置情報取得手段10eと、復帰走行させる復帰手段10gとを半自律型車両に設けている。
(もっと読む)
31 - 40 / 130
[ Back to top ]