
国際特許分類[G05D1/00]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 非電気的変量の制御または調整系 (4,282) | 陸用,水用,空中用,宇宙用運行体の位置,進路,高度または姿勢の制御,例.自動操縦 (1,941)
国際特許分類[G05D1/00]の下位に属する分類
二次元の位置または進路の制御 (1,634)
高度または深度の制御 (3)
姿勢制御,すなわちロール,ピッチまたはヨウの制御 (132)
三次元における位置または進路の同時制御 (20)
目標捜索制御 (22)
国際特許分類[G05D1/00]に分類される特許
21 - 30 / 130
移動体遠隔操縦システムおよびそのための制御プログラム
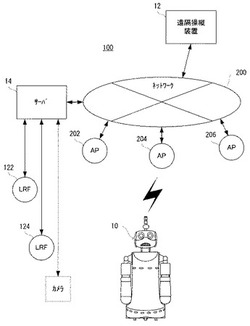
【課題】 通信障害領域が存在する環境でも、簡単な構成で移動体を安全に遠隔操縦可能にする。
【解決手段】 移動ロボット遠隔操縦システム100はCPU(80,20,40)およびメモリ(84,22,42)を含み、メモリの保存領域(170,130,150)には地図情報(138)が、一時記憶領域(180,140,160)には地図情報に対応する区域内で無線通信に障害が生じる通信障害領域(IO1〜IO5)を示す情報が仮想障害物情報(148)として記憶される。CPUは、センサ(122,124,40,46,58,70,112a,112b)からの情報に基づいて、地図情報に対応する区域での移動ロボット10の少なくとも位置を検出し(S1,S5)、地図情報および仮想障害物情報と検出結果とに少なくとも基づいて、通信障害領域を回避するように移動体を移動させる移動制御情報(182a)を作成する(S75,S105)。
(もっと読む)
個人の相互交流のためのコンパニオンロボット

【課題】ロボットを人間と相互交流できるようにする。
【解決手段】人間の居住者と相互交流するための来客としての移動ロボット10は、居住者との相互交流に先立ち、部屋を縦横に捜索手順を実行し、目的の居住者が在宅しているか口頭で尋ねることがある。居住者を発見した時点で、移動ロボットは、遠隔地第三者とのテレビ会議セッションを実施する、または種々の方法で居住者と相互交流することができる。例えば、ロボットは、居住者と会話をし、薬剤または他のスケジュールの遵守を促進する。さらに、ロボットは、居住者との衝突を回避するための安全機能を組み込み、またロボットは、危険な障害にならないように、その存在を聞こえるように知らせる、および/または目に見えるように示すことができる。さらに、あらゆるセンサの記録および転送が居住者に承認されるように、移動ロボットは、組み込まれたプライバシーポリシーに従い行動する。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域の境界と走行予定領域における作業車の位置を簡易な構成で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】原動機(電動モータ)と、原動機に接続される駆動輪と、作業機(ブレード)とを備え、走行予定領域を原動機を駆動して自律走行しつつ作業する自律走行可能な作業車の制御装置において、方位(地磁気)センサの出力に基づいて絶対方位を検出すると共に、磁気ネイル(磁石)に対する位置を検出し、磁気ネイルの埋設位置を座標で示す地図情報と検出された位置に基づいて走行予定領域における作業車の位置を検出し(S12,S20,S32)、検出される絶対方位と作業車の位置とYawセンサなどの出力に基づいて算出される進行方位と走行距離に基づき、予め定められた作業プログラムに従って走行予定領域Aでの作業を制御する(S10からS46)。
(もっと読む)
技術設備を遠隔操作式および/または自律式に検査するロボット用プラットフォーム
【課題】技術設備を遠隔操作式および/または自律式に検査するロボット用プラットフォームであって、少なくとも、駆動手段と、検査手段と、位置データを求めるための手段と、通信手段とを備えているものを改良して、公知の検査ユニットの欠点を解消して、様々な検査目的および検査場面に対する適合性を大幅に改善し、著しく簡素化されたトラブルのないデータ通信が得られるものを提供する。
【解決手段】ロボット用プラットフォーム10,20は、モジュール方式に形成されており、通信手段12,13,14は、統一規格に従って作動し、測定データおよび位置データは、ストリーミングにより、遅延時間がエラーのない評価にとって十分な程度に小さく、特に1msより小さくなるように迅速に評価ユニットに伝達される。
(もっと読む)
移動機械の移動方法
【課題】移動機械および移動機械周囲の状況を常に把握しつつ当該移動機械を移動すること。
【解決手段】複数の移動機械1A,1Bを用い、全ての前記移動機械1A,1Bにおいて、任意の移動機械1B(1A)により他の1つの移動機械1A(1B)を包含する空間情報を取得し、当該空間情報に基づいて前記他の1つの移動機械1A(1B)を移動させる。これにより、移動機械1A,1Bおよび移動機械1A,1B周囲の状況を常に把握しつつ当該移動機械1A,1Bを移動することができる。
(もっと読む)
駐車支援装置
【課題】出庫困難となるような駐車支援を禁止し、適切な駐車支援が行える駐車支援装置を提供する。
【解決手段】本発明に係る駐車支援装置1においては、各種センサの時系列の計測値に基づき、車両状態判断部21が駐車支援後に自車両が自走困難な状態になる可能性があるか否かについて判定を行なう。車両状態判断部21が、駐車支援後に自走困難状態になる可能性があると判定した場合には駐車支援を禁止する。また、車両の異常状態の影響度を定量化し、影響度が自動駐車に重大な影響を与えない範囲の偏向に収まる場合は駐車支援を許可し、影響が大きい場合には駐車支援を許可しないこととする。
(もっと読む)
遊泳型アクセス装置の姿勢安定化システム
【課題】バラストタンクのバラスト調整により遊泳型アクセス装置の上下移動だけでなく、姿勢を容易に制御することを可能にする。
【解決手段】完全に分離した複数のタンク22が集合してなるバラストタンク10と、 水中における遊泳型アクセス装置6の本体の傾斜の方向、傾斜量を計測する姿勢計測手段12と、バラストタンク10を構成するタンクのうち、任意のタンクへの注排水を実施する注排水手段と、姿勢計測手段による計測結果に基づいて、目標とする姿勢を保つのに必要な注排水を実施すべきバラストタンク10のタンク22の特定と必要とされる注排水量の演算を行い、その演算結果に従って前記注排水手段の動作を制御する制御手段14と、を設ける。
(もっと読む)
自走車
【課題】指等の入力指示体の最低限の動きで操作情報を入力することができる自走車を提供すること。
【解決手段】電動車椅子1において、車椅子本体10に対する操作入力に赤外光を利用した光学式の操作入力装置100を用いているため、指Ob1の小さな動きで操作入力を行なうことができる。このため、操作レバーを手動操作できない者や、音声入力できない者であっても、車椅子本体10を操作することができる。また、電動車椅子1には、赤外光を利用した光学式の障害物検出装置200を設けたため、安全な走行を実現することができる。
(もっと読む)
自己推進装置用格納式ライン案内
【課題】自己推進芝刈り機のような、自己推進装置のための格納式ライン案内を提供する。
【解決手段】操作部がストリングまたはラインを動かすことによって、この装置の移動速度および移動方向を制御する。引っ込み可能および伸長可能なラインが装置に取り付けられており、ラインが伸長しているときには、引っ込み方向に張力を受ける。ラインの伸長長を監視し、ラインの伸長長を選択長に維持するために、ラインの伸長長に応答して、装置の移動速度を制御する。装置に対するラインの角度を監視し、ラインの角度を選択角度に維持するために、ラインの角度に応答して、装置の移動方向を制御する。
(もっと読む)
21 - 30 / 130
[ Back to top ]