
国際特許分類[G08G1/015]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 計数または制御されるべき交通量の検出 (1,848) | 各種の自動車と二輪車を判別するための装置を持つもの (105)
国際特許分類[G08G1/015]に分類される特許
21 - 30 / 105
移動体検出装置
【課題】安定性に優れ精度の高い移動体検出が可能となる移動体検出装置を提供する。
【解決手段】移動体が移動する移動路の側部に設けられ、当該移動路を移動する移動体の側面までの距離を示す距離画像を取得する距離画像取得手段と、この距離画像取得手段により取得された距離画像から前記移動体の側面に対する特徴量を求める特徴計算手段と、この特徴計算手段により求められた特徴量に基づき、あらかじめ標準的な移動体から取得された基準の特徴量を参照することにより前記移動体を判別する移動体検出手段とを具備している。
(もっと読む)
車幅推定装置、車両推定装置、車幅推定方法及びプログラム

【課題】撮像装置が撮像した画像に写った車両の車幅に対応する長さを精度良く推定する。
【解決手段】差分画像生成部102が、撮像装置200が連続撮像した画像の輝度の差分となる差分画像を生成し、平均輝度算出部104は、当該差分画像の車幅方向の各画素に対する車両進行方向の画素の平均輝度を算出する。そして、閾値算出部107が、平均輝度算出部104が算出した複数の平均輝度を用いて、画像における車両の有無を判定する車両判定閾値を算出し、車幅算出部108は、当該車両判定閾値を用いて車幅を算出する。
(もっと読む)
車両感知器
【課題】安価な構成で、道路を通過する車両の種々の情報を取得することができる。
【解決手段】道路を通過する車両の高さを検出するための車両感知器であって、道路に向かって無線信号を送信し、送信した無線信号が反射した無線信号を受信するための送受信部51と、送受信部51によって受信された無線信号に基づいて、無線信号が反射した位置と送受信部との間の距離を測定するための距離測定部52と、距離測定部52の測定結果に基づいて、道路を通過する車両の高さを算出するための車高算出部52とを備える。
(もっと読む)
料金収受システム、料金収受方法及びプログラム
【課題】第1アンテナで車両情報の読み出しに失敗した場合に、再度車載器から車両情報を読み出し、かつ発進制御機の進行方向前方に存在する車両の車載器に所定の情報を書き込む。
【解決手段】通路の入口の所定の範囲を通信領域とし、車両20に搭載された車載器21から車両20を特定する車両情報を読み出す第1アンテナ15と、第1アンテナ15の車両進行方向前方に、通路を開閉自在に設置された発進制御機17と、発進制御機17の車両進行方向前方及び車両進行方向後方の所定の範囲を通信領域とし、車載器21から車両情報を読み出し、第1アンテナ15または自アンテナが車両情報の読み出しに成功した場合に、車載器21に所定の情報を書き込む第2アンテナ16とを備える。
(もっと読む)
走行車両台数計測装置及びプログラム
【課題】 1車線の道路上を走行した車両台数を正しく計測することが可能なドップラー方式の検出センサを用いた走行車両台数計測装置の提供。
【解決手段】 1車線上における任意の計測範囲内を走行中の車両に対し放射した送信波と、車両からの反射波との差分波を周波数分析することによって抽出される車両の速度と振幅値とを取得してそれらの時間変位を記録する。記録した車両速度と振幅値とに基づいて、前記計測範囲に車両が進入してから通過し終わるまでにかかる経過時間を確定し、当該確定した経過時間毎に車両台数をカウントする。すなわち、単に車両速度のみを用いて通過車両の台数をカウントするのではなく、車両速度に振幅値を組み合わせて用いて通過車両の台数をカウントする。これにより、計測範囲内における車両の移動態様を的確に把握して通過車両の台数をカウントすることが、ドップラー方式の検出センサを用いるだけでできるようになる。
(もっと読む)
車軸検知装置
【課題】 軸数センサを道路に埋め込むことなく、レーンを通行する車両の車軸を検出することを目的とする。
【解決手段】 強度変調したレーザ光を走査し、路面に向かって斜め下方にレーザ光を放射する微細電子機械素子スキャナと、物体から反射してくる反射光を受光する長尺フォトダイオードとを有した送受光学部を備えて、長尺フォトダイオードの出力光信号の検波信号からレーザ光の反射点までの距離を計測し、得られたレーザ光の反射点までの距離及びレーザ光の照射方向に基づいて車両のタイヤを検知し、軸数をカウントする。
(もっと読む)
車両判定システム及び通行物体管理システム
【課題】通行する物体が車両であるか否かを正確に判定する。
【解決手段】三次元形状記憶部211は、車両である物体と車両でない物体とを含む複数の物体の三次元形状を記憶する。三次元形状照合部212は、三次元形状測定装置が測定した物体の三次元形状と、三次元形状記憶部211が記憶した三次元形状とを比較して、最も近い三次元形状を判定する。種別判定部213は、三次元形状照合部212の判定結果に基づいて、三次元形状測定装置が三次元形状を測定した物体が、車両であるか否かを判定する。
(もっと読む)
信号制御装置及びジレンマ感応制御方法
【課題】 車両5ごとに正確なジレンマ判定を実行して、隣接交差点との系統制御に及ぶ悪影響を低減する。
【解決手段】 本発明は、交差点Jへの流入道路を走行する車両5が、現サイクルの黄信号開始時において危険ゾーンの走行区間Z1,Z2に存在する場合に、流入道路に通行権を与えている現サイクルの青信号を継続し、存在しない場合に、当該青信号を打ち切るジレンマ感応制御を行う信号制御装置2である。この装置2は、車両5の速度及び位置を取得し、車両5に対応する危険ゾーンを当該車両5ごとに設定し、取得された車両5の速度及び位置と設定された危険ゾーンとに基づいて、車両5がこれに対応する危険ゾーンの走行区間Z1,Z2に存在するか否かを判定する。
(もっと読む)
通行物体管理システム
【課題】通行する物体を正確に管理する。
【解決手段】三次元形状測定装置100aが、通行路の入口を通過する物体の三次元形状と進行方向とを測定する。三次元形状測定装置100bが、通行路の出口を通過する物体の三次元形状と進行方向とを測定する。物体が通行路内に進入した場合、三次元形状測定装置100aが測定した三次元形状を、通路内物体形状記憶部220が記憶する。物体が通行路外へ退出した場合、三次元形状測定装置100bが測定した三次元形状と、通路内物体形状記憶部220が記憶した三次元形状とを、通過物体判定分240が比較して、同一物体であるか否かを判定する。
(もっと読む)
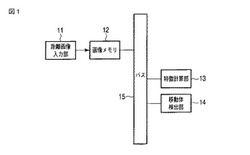
車種判別装置及び運転支援装置
【課題】簡単に、かつ低コストに、自車両の前方を走行する車両の種別判別を行うことができる種別判別装置を提供する。
【解決手段】本発明の種別判別装置によれば、車載カメラ11が自車両に搭載されており、当該車載カメラ11が走行中自車両の前方を走行している車両を撮影する。画像メモリ12に撮影した画像を記憶する。そして、画像処理手段13は、撮影した前方車両の特長部位の画像を構成する画素数を計測する。更に、車種判別手段14は、計測した画素数と予め定めた閾値とを比較し、前方車両の車種を判別する。
(もっと読む)
21 - 30 / 105
[ Back to top ]