
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
7,301 - 7,310 / 7,349
自動車において障害物までの距離を検出する装置及び方法
本発明は、距離センサ(1〜6)及び制御ユニット(10)を有する、障害物(8、8’)からの自動車(7)の距離(A)を検出する装置(15)に関する。本発明の装置は、制御ユニット(10)が動的車両データを使用して自動車(7)がもうすぐ至る運転経路(11)の計算に適合されることを特徴とする。制御ユニット(10)はまた運転経路(11)内にある関係のある障害物(8’)と運転経路(11)の外部にある無関係な障害物(8)とを区別するのに適している。本発明はまた障害物(8、8’)からの自動車(7)の距離(A)を検出する方法に関する。
 (もっと読む)
(もっと読む)
意図的でない車線逸脱の検出
車両の意図的でない車線逸脱を自動的に検出するための方法および装置を説明する。車輪逸脱警報装置は、車線逸脱認識ユニット(10)、警報生成ユニット(12)、および運転手活動監視ユニット(14)を備える。運転手活動監視ユニット(14)は、運転手の制御介入に応じて連続的に変化する舵取り角などの1つ以上の車両関係パラメータを監視するよう形成される。実際のまたは間近に迫った車線逸脱が検出されかつ運転手の活動が低いまたは活動的でないことを1つ以上のパラメータの評価が示す場合は、警報生成ユニット(12)は警報を生成する。  (もっと読む)
(もっと読む)
自動車用運転支援システム
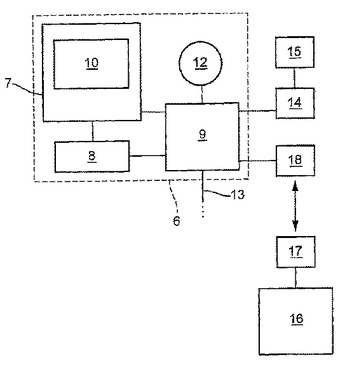
本発明は、少なくとも1つの駆動ユニットと、1つのステアリング装置と、1つのブレーキ装置とを有する、電子制御式駆動伝達系を備えた、自動車、特に多用途車に関する。自動車の運転を簡素化するために、表示装置(7)と、入力装置(8)と、制御システム(9)とを備えた運転支援システム(6)が設けられる。表示装置(7)は、車両の実際の向き及び実際の位置、及び車両の比較的近い周囲状況を、モニタ(10)に表示するよう適合される。入力装置(8)は、車両の所望の向き及び所望の位置を入力するよう適合される。制御システム(9)は、運転アルゴリズム(12)を処理するように適合され、駆動伝達系を作動させて、車両の周囲状況を考慮しつつ、車両をその実際の向き及び実際の位置からその所望の向き及び所望の位置に移動する。
 (もっと読む)
(もっと読む)
プリセーフシステムを装備した自動車
本発明は、自動車の少なくとも1つの周囲認識装置(4)及び運転状況データ検出装置(5)によって受信された情報に従って作動されるアクティブ及び/又はパッシブセーフティ装置(13、14)を備え、前記情報はデータ評価装置(10)によって分析される、プリセーフシステム(2)を装備した自動車(1)に関する。アクティブ及び/又はパッシブセーフティ装置(13、14)の少なくとも1つの要素は、自動車の周囲認識装置(4)の情報が潜在的な衝突物を示すと、及び運転状況データ入力装置(5)が衝突が妥当であると判断すると作動される。  (もっと読む)
(もっと読む)
緊急制動プロセス中に車両の運転者を支援する方法及び装置
本発明は、車両が、その走行方向の前方の検出領域内に位置する物体、特に先行車両との衝突を防止するために、緊急制動中に車両の運転者を支援する方法及び装置に関する。本発明の方法によれば、所定の緊急制動条件が満たされた場合に、また運転者が緊急制動プロセスを行おうとしていることが検出された場合に、車両(50)を減速するために設けられる制動手段が、運転者とは独立して起動され、緊急制動条件が満たされた場合に、緊急制動情報が車両(50)の運転者に伝達される。本発明によれば、緊急制動条件が満たされないときでも、検出領域(54)における現在の周囲状況又は交通状況に関する情報を車両(50)の運転者に通知する情報が伝達され、予め規定された情報条件が満たされた場合に、運転者への前記情報が調整される。  (もっと読む)
(もっと読む)
自動車の死角内の物体の存在を磁気的に検出するシステム及び方法
本発明は、自動車の死角内の物体の存在を磁気的に検出するためのシステム及び方法に関する。本発明のシステムは、死角に侵入する強磁性物体によって生じる地磁場の歪みを検出するための第1手段(1)、車両の軌道、傾斜及び/又は振動に、並びに車両内部に発生する磁場に誘起される磁気歪みを検出する第2手段(2)、第3手段(3)、及び第4手段(4)を有し、前記手段は全て電子回路(5)に接続されている。本発明によると、軌道、傾斜及び/若しくは振動、又は車両内部に発生する磁場を、特定の状況による対応する磁場の歪みに関連付けるテーブルが生成される。本発明の方法は、前記システム及びテーブルを用いて、前記可能な磁気歪みの物体検出への影響を中和する。
 (もっと読む)
(もっと読む)
立体視に基づく差し迫った衝突の検知
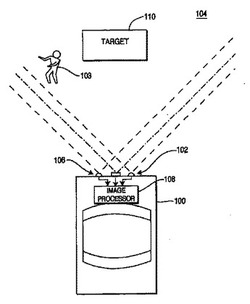
場面の奥行きマップを生成するため処理される画像を生成する立体カメラを有する立体視に基づく衝突回避システム。潜在的な脅威を、奥行きマップにおいて検知する。そして、検知した潜在的な脅威の大きさ、位置、および速度を推定し、推定した位置および推定した速度を用いて、検知した潜在的な脅威の軌道解析を決定する。軌道解析に基づく衝突予測を決定し、衝突が差し迫ったものであるかどうかを、衝突予測および推定された潜在的な脅威の大きさに基づいて決定する。 (もっと読む)
近接センシングシステム
大型の公共車両または商用車両のような車両のミラーハウジング部品の内部または近傍に取り付けられるかもしれない車両近接センシングシステムであって、車両の前面の近くにある障害物を検知する。たとえば、外部後方ミラーの下または運転者に見えない場所にある障害物を検知する。そして制御信号を同一車両の運転手台内に送信して、警告装置を使って運転者に警告する。 (もっと読む)
運転者の行動解釈に基づいて自動車のサブシステムを制御する方法および機構

本発明は、自動車の運転のためのタスクに対する運転者の不注意レベルの検出に依存する、自動車のサブシステムを制御するシステムおよび方法に関する。可変特性は、運転者の不注意と相関し、実質的に実時間に基づいて、測定される。不注意のレベルは、少なくとも部分的に、測定に基づいて評価される。クルーズコントロールや車線維持支援のような自動車のサブシステムの動作は、それに基づいて、前記自動車の動作が運転者の現在の不注意レベルに適切に合致することを保証するように、調整される。前記サブシステムの動作は、運転者の不注意レベルが増加すると本質的に危険性を増す走行条件が確立されることを防ぎまたは回避するように制御される。 (もっと読む)
自動車内における運転者の負荷を調整するための方法及び装置
本発明は、自動車を運転中の運転者の負荷を調整するための方法であって、負荷の値がセンサによって記録された運転者の生理的データから決定される方法、及び前記方法を実行するための装置に関する。本発明によれば、運転者の負荷、すなわち、運転負荷は、最適な運転負荷範囲に維持され、又は前記最適な範囲から外れたときには、そこに戻され、これによって、運転者の最適な動作能レベル又は注意レベルを保証する。すなわち、車両システムは、決定された運転負荷値に依存して制御され、これによって、運転者は、視覚的、聴覚的、又は触知的センサによって、前記運転者の運転負荷値が最適な運転負荷範囲内の値に維持される。 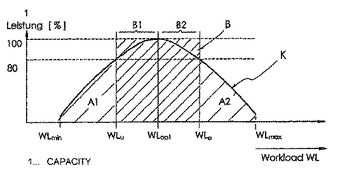 (もっと読む)
(もっと読む)
7,301 - 7,310 / 7,349
[ Back to top ]