
国際特許分類[G09B9/00]の内容
物理学 (1,541,580) | 教育;暗号方法;表示;広告;シール (131,780) | 教育用または教示用の器具;盲人,聾者または唖者の教習,または意志を通じるための用具;模型;遊星儀;地球儀;地図;図表 (19,563) | 教習または訓練目的のためのシミュレータ (862)
国際特許分類[G09B9/00]の下位に属する分類
乗物またはその他の運搬機の操縦を教習するためのもの (442)
レーダの模擬 (2)
ソナーの模擬
国際特許分類[G09B9/00]に分類される特許
1 - 10 / 418
手持ち回転工具の安全体感装置
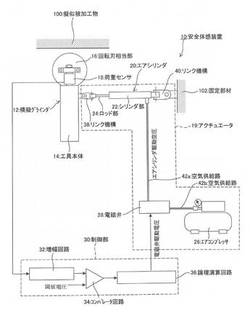
【課題】手持ち回転工具を用いた際に生ずることがある、いわゆるキックバック現象の衝撃を被験者が体感することのできる安全体感装置を提供する。
【解決手段】上記課題を解決するための手持ち回転工具の安全体感装置は、少なくとも手持ち回転工具の持ち手部を有する工具本体14と、持ち手部の先端側に設けられる回転刃相当部16と、回転刃相当部16が擬似被加工物100へ接触した際の物理的変位を感知する荷重センサ18と、工具本体14を前記持ち手部を模した回転工具の回転刃回転方向と逆方向へ移動させるアクチュエータ19と、荷重センサ18から出力される変位信号を得ることによりアクチュエータ19を稼動させる稼動信号を出力する制御部30と、を備えることを特徴とする。
(もっと読む)
分散制御システムの訓練システム

【課題】DCS改修作業後の回復処理が簡便な分散制御システムの訓練システムを提供する。
【解決手段】複数の制御対象機器を含むプラントを模擬する訓練システム用計算機と、訓練システム用計算機の複数の制御対象機器に対して操作信号を与える複数のコントローラと、通信線を介して複数のコントローラに接続された訓練用開発計算機と訓練用計算機を備え、訓練員は訓練用計算機を用いて訓練システム用計算機との間で訓練を実施するようにされた分散制御システムの訓練システムにおいて、訓練用開発計算機は、訓練初期状態情報ファイルと自動再生成ファイルを備え、訓練状態において、訓練初期状態情報ファイルと自動再生成ファイルには、訓練システム用計算機と複数のコントローラと訓練用計算機の出力を逐次記憶することで選択された訓練コースの途中経過を記憶する。
(もっと読む)
半導体製造装置のトレーニングシステム及びトレーニングサーバ、端末装置並びに半導体製造装置のトレーニング方法
【課題】 ユーザに対する半導体製造装置のトレーニングの実施を効率的に行う半導体製造装置のトレーニングシステムを提供する。
【解決手段】 装置トレーニングサーバ1とユーザ端末3とを回線5を介して接続し、装置トレーニングサーバ1ではプログラム記憶手段が半導体製造装置に関するシミュレーションを行うプログラムを記憶し、条件データ受信手段がユーザ端末3によりユーザから受け付けられて回線5を介して送信される半導体製造装置に関するシミュレーションの条件データを受信し、プログラム実行手段が受信した条件データに基づいてプログラム記憶手段に記憶されたプログラムを実行し、結果データ送信手段が実行したプログラムにより行われるシミュレーションの結果データを回線5を介してユーザ端末3に対して送信する。
(もっと読む)
血管吻合トレーニング装置
【課題】血流の拍動に伴う臓器の動きを模擬して血管モデル全体を上下動させることが可能で薄型の血管吻合トレーニング装置を低コストに提供する。
【解決手段】血管吻合トレーニング装置10は、血管モデル30が載置された載置プレート12と、載置プレート12を上下動させるプレート駆動装置20とを備える。プレート駆動装置20は、載置プレート12の下側に設けられ、膨張時には載置プレート12を押し上げ、収縮時には載置プレート12を引き下げるバルーン21a,21bと、バルーン21a,21b内への空気の出し入れを繰り返させるベローズポンプ23とを備える。
(もっと読む)
ロジック変換装置、ロジック変換方法及びプログラム
【課題】ハードウェアロジック図をソフトフェアロジック図に変換する際に、定形外の動作の情報をソフトフェアロジック図に反映することにより、作業効率を上げる。
【解決手段】ロジック変換装置10は、ハードウェアロジックデータベース1から読み出したハードウェアロジック図1aよりハードウェアの論理を抽出したハードウェアロジック情報、素子データベース6から抽出する素子に関する情報及び定形外の動作の情報に基づいて、ハードウェアの論理を解析する解析部11を備える。また、ハードウェアの論理を、素子に関する情報及び定形外の動作の情報が反映されるソフトフェアロジック図9aに変換して、ソフトフェアロジック図9aをソフトフェアロジックデータベース9に書き込む変換部12を備える。
(もっと読む)
訓練学習支援装置
【課題】本発明は、プラント運転訓練システムにおいて訓練生の習熟効率を高める訓練支援学習装置の提供を目的とする。
【解決手段】訓練学習支援装置300は、制御パラメータの目標情報が入力される目標値入力手段320と、プラントシミュレータ100の操作リストが入力される操作リスト入力手段330と、制御パラメータと目標情報との比較に基づき推奨操作内容を決定する推奨操作作成手段310と、推奨操作内容を表示する表示手段340とを備える。推奨操作作成手段311は、各操作の実施時期と操作パラメータを含む操作情報を操作リストに加えた操作内容を作成してプラントシミュレータ100に入力する操作内容決定手段311と、制御パラメータの遷移情報を目標情報と比較して評価度を算出する操作結果評価手段312と、を備える。操作内容決定手段311は、数理計画法により評価度が高くなる方向に操作情報を変更して推奨操作内容を決定する。
(もっと読む)
プラントシミュレーション装置
【課題】多様な事故事象を想定することができ、現実に即してシミュレーションできるプラントシミュレーション装置を提供する。
【解決手段】プラントに含まれる構造物の三次元位置を含む構造物情報を記憶する記憶手段41と、異常事象が発生した三次元位置を含む異常事象情報を設定する異常事象設定手段(ステップS1)と、異常事象に起因して異常状態となる構造物を、異常事象情報に基づいて記憶手段41から検索する検索手段(ステップS2)と、検索手段により検索された構造物に異常状態を設定し、構造物情報に基づいてプラントの状態を模擬する模擬手段(ステップS4)とを備えた。
(もっと読む)
力覚提示装置
【課題】様々な道具に対応可能で、現実の動きに対応して道具を交換可能で、より現実感があり、機能性流体に直接、力をかけることができ、容易に繰り返し使用することができる力覚提示装置を提供する。
【解決手段】MR流体から成る機能性流体12が、表面または内部にかかる力に対して抵抗力をかけることができ、一部が開口した収納容器11の内部に収納されている。移動台15が、収納容器11を載せて、サーボモータ26により水平方向および垂直方向に移動可能に設けられている。制御手段が、機能性流体12に磁場をかけるための磁場発生部13を有し、あらかじめ測定された、切断器具で生体軟組織を切断したときの生体軟組織の抵抗力に応じて、磁場発生部13を制御して機能性流体12の抵抗力を制御するとともに、生体軟組織の粘弾性特性に応じて、サーボモータ26を制御して移動台15の動きを制御するようになっている。
(もっと読む)
医療用実習システム
【課題】同時に複数の医療用実習装置を用いて医療実習を実施するための技術を提供する。
【解決手段】医療用実習システム100は、それぞれで歯科実習が実施される複数の医療用実習装置10を備えている。複数の医療用実習装置10のそれぞれは、擬似患者体2および診療台3を備えている。また、医療用実習システム100は、擬似患者体2の動作を制御する中央制御部90と、擬似患者体2の頭部模型2aの表情を変化させる擬似患者体駆動部2Aと、医療実習において、擬似患者体2の動作内容を示す情報が記述されている複数の医療用実習シナリオの中から、特定の医療用実習シナリオを選択するための表示部92(シナリオ選択部)とを備えており、中央制御部90は、選択された医療用実習シナリオを実行する。
(もっと読む)
医療用実習システム
【課題】複数の医療用実習装置が使用される場合にも、実習状況を的確に把握できる技術を提供する。
【解決手段】医療用実習システム100は、複数の医療用実習装置10において実行される歯科実習の実習状況を監督するためのシステムである。医療用実習システム100は、医療実習が行われる複数の医療用実習装置10と、複数の医療用実習装置10を集中的に制御する中央制御部90と、1台毎の医療用実習装置10における実習状況を撮影する第一撮像部101と、2台以上の医療用実習装置10を含むようにして撮影する第二撮影部102と、第一撮影部101により撮影された第一撮影画像と、前記第二撮影部により撮影された第二撮影画像とを表示する表示部92とを備える。
(もっと読む)
1 - 10 / 418
[ Back to top ]