
マーカーシステムおよびその使用方法
マーカーシステムは、第1の表面および第2の表面を有する構造と、第1の表面上に位置する第1のマーカーと、第2の表面上に位置する第2のマーカーとを含み、第1のマーカーおよび第2のマーカーは、ほぼ同じ方向に面するように、かつ光学装置で同時に見ることができるように配置され、第1および第2のマーカーを光学装置で同時に見たとき、第1のマーカーと光学装置との間の第1の距離は、第2のマーカーと光学装置との間の第2の距離とは異なる。

【発明の詳細な説明】
【技術分野】
【0001】
関連出願データ
本出願は、2007年5月14日出願の米国特許出願第11/748,406号に関連し、その全開示を引用により本明細書に明示的に組み込む。
【0002】
本出願は、マーカーシステムに関し、より具体的には、医療分野で使用されるマーカーシステムに関する。
【背景技術】
【0003】
放射線治療は、がん性腫瘍など、人体の特定領域を高い照射量に選択的に暴露する医療処置を伴う。放射線治療の目的は、有害組織が破壊されるように、標的の生体組織を照射することである。特定のタイプの放射線治療では、不必要な放射線損傷を健康な組織に与えることを回避するため、照射体積を腫瘍または標的組織部位のサイズおよび形状に制限することができる。例えば、原体照射法(conformal therapy)は、治療体積を標的腫瘍により緊密に合致させることによって、線量分布を最適化するために用いられる場合が多い放射線治療技術である。
【0004】
正常な生理学的運動は、従来の放射線治療および原体照射法の臨床計画および送達における制限を表す。呼吸または心臓の運動などの正常な生理学的運動は、照射を受ける腫瘍または組織部位の位置の移動を生じさせる場合がある。放射線ビームが、治療体積を腫瘍の正確な寸法に合致させるように形作られている場合、治療中のその腫瘍の運動によって、放射線ビームが標的の腫瘍組織を完全に網羅するのに十分なサイズまたは形状とならない場合がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願公開第11/748,406号明細書
【特許文献2】米国特許出願公開第10/033,327号明細書
【特許文献3】米国特許出願公開第10/687,573号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
この問題に対処するため、放射線ビームのサイズおよび/または形状は、標的組織の完全な照射を維持するように「移動マージン」(すなわち、標的組織がいずれかの方向に移動する予測距離)分だけ拡張することができる。この方策の欠点は、この照射体積の増加によって、拡張した体積の範囲内に位置する他の健康な組織に放射線が適用されてしまうことである。換言すれば、治療中の移動には、拡張されたサイズの放射線照射野を適用する必要があり、それが、標的治療体積を取り囲む正常な組織の容認できない大きな体積に悪影響を与える可能性がある。
【0007】
この問題に対する別の方策は、患者の身体の運動に同調させたゲート制御(gating)信号を用いて、治療中の放射線ビームの生理学的ゲート制御を伴う。この方策では、検査中の特定の生理学的運動を参照して患者の生理学的状態を測定する機器が利用される。例えば、呼吸は、患者の体内における肺腫瘍の位置の動きを引き起こすことが示されている。放射線治療が肺腫瘍に適用されている場合、温度センサ、歪みゲージ、または呼吸気流計(preumotactrograph)を患者に取り付けて、患者の呼吸周期を測定することができる。呼吸周期において肺腫瘍の過剰な動きに対応する期間中は放射線ビームが中断されるように、測定された呼吸周期内の特定の閾値点に基づいて放射線ビームをゲート制御することができる。
【0008】
現在、放射線適用の生理学的ゲート制御を正確に一貫して実行できるようにする方法およびシステムが必要とされている。
【課題を解決するための手段】
【0009】
いくつかの実施態様によれば、マーカーシステムは、第1の表面および第2の表面と、第1の表面上に位置する第1のマーカーと、第2の表面上に位置する第2のマーカーとを有する構造を含み、第1のマーカーおよび第2のマーカーはほぼ同じ方向に面するように配置され、それによって光学装置によって同時に見ることができ、第1および第2のマーカーを光学装置によって同時に見たとき、第1のマーカーと光学装置との間の第1の距離は第2のマーカーと光学装置との間の第2の距離とは異なる。
【0010】
他の実施態様によれば、マーカーシステムは、ベースと、第1の表面と、第2の表面とを有する構造を含み、第1の表面はベースに対して角度を形成し、角度は30°〜90°の値であり、第1のマーカーは第1の表面上に位置し、第2のマーカーは第2の表面上に位置し、第1の表面は平面領域を有し、平面領域は第1のマーカーがカバーする面積よりも大きい面積を有する。
【0011】
他の実施態様によれば、光学装置を有するマーカーシステムを使用する方法は、第1のマーカーを第1の位置に設置するステップと、第2のマーカーを第2の位置に設置するステップとを含み、第1のマーカーおよび第2のマーカーは、光学装置の視線方向で測定した第1のマーカーと第2のマーカーとの間の距離が少なくとも0.5cmであるようにして設置される。
【0012】
他の実施態様によれば、マーカーシステムは、第1の法線を有する第1のマーカーと、第2の法線を有する第2のマーカーとを含み、第1の法線および第2の法線は15°未満の角度を形成し、第2のマーカーは、第1の法線に垂直であって第1のマーカーと交差する面から間隔を空けられる。
【0013】
本発明の他の態様および特徴は、本発明を限定するのではなく例示することを意図する好ましい実施形態の以下の詳細な説明を読むことによって明白になるであろう。
【図面の簡単な説明】
【0014】
【図1】本明細書に記載するマーカーシステムの実施形態とともに使用されてもよい放射システムを示す図である。
【図2】いくつかの実施形態によるマーカーブロックの一例を示す図である。
【図3A】いくつかの実施形態による図2のマーカーブロックの側面視である。
【図3B】他の実施形態による図2のマーカーブロックの側面図である。
【図4A】カメラの側面図である。
【図4B】図4Aのカメラの正面図である。
【図5】他の実施形態によるマーカーブロックを示す図である。
【図6】他の実施形態によるマーカーブロックを示す図である。
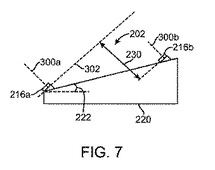
【図7】他の実施形態によるマーカーブロックを示す図である。
【図8】共通の直線面上にマーカーを有するマーカーブロックの一例を示す図である。
【図9】本明細書に記載する実施形態とともに実現されてもよいコンピュータシステムのブロック図である。
【発明を実施するための形態】
【0015】
図面は、好ましい実施形態の設計および有用性を示し、図面中、類似の要素は共通の参照番号によって参照する。実施形態の利点および目的がどのようにして得られるかをより良く理解するため、実施形態のさらに具体的な説明を添付図面に例示する。
【0016】
以下、様々な実施形態を図面を参照して記載する。図面は縮尺どおりに描かれているものではなく、類似の構造または機能の要素は、図面全体を通して同様の参照番号で表されることに留意されたい。また、図面は、単に、特定の実施形態について記載するのを容易にするためのものであることに留意されたい。それら図面は、本発明の包括的な説明として、または本発明の範囲に対する限定として意図されるものではない。それに加えて、特定の実施形態と併せて記載される態様は、必ずしもその実施形態に限定されるものではなく、他のいずれの実施形態においても実施することができる。
【0017】
放射システム
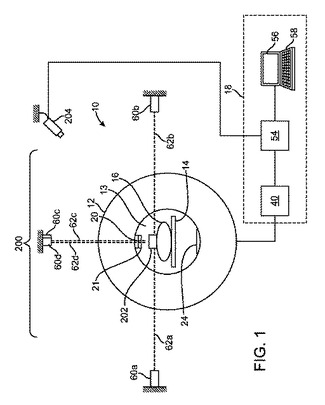
図1は、放射システム10を示す。システム10は、開口部(または穴)13を有するガントリー12と、患者16を支持する患者支持部14と、ガントリー12の動作を制御する制御システム18とを含む。図示される実施形態では、ガントリー12は、スリップリング構造(ドーナツ形状)を有する。あるいは、ガントリー12は、C-アーム構造などの他の構造を有することができる。システム10はまた、患者16に向けて放射線ビームを投射する放射源(例えば、X線源)20と、ビームの形状を変えるコリメータ21とを含む。システム10はまた、ガントリー12の反対側に検出器24を含み、それは、場合によっては、患者16から出る放射を受け取り、受け取った放射を使用して画像(1つまたは複数)を生成するのに使用されてもよい。検出器24は、患者16を通り抜けるX線を感知するために構成された複数のセンサ素子を有する。各センサ素子は、X線ビームが患者16を通り抜けると、その強度を表す電気信号を生成する。他の実施形態では、システム10は検出器24を含まない。
【0018】
図示される実施形態では、放射源20は、治療エネルギーを供給する治療放射源である。他の実施形態では、放射源20は、診断エネルギー(例えば、画像を生成するのに適したエネルギー)を供給する診断放射源であってもよい。さらなる実施形態では、放射源20は、治療エネルギーおよび診断エネルギーを選択的に供給するように構成することができる。いくつかの実施形態では、治療エネルギーは、一般に160キロ電子ボルト(keV)以上、より一般的には1メガ電子ボルト(MeV)以上であり、診断エネルギーは、一般に、高エネルギー範囲を下回るエネルギーであり、より一般的には160keV未満である。他の実施形態では、治療エネルギーおよび診断エネルギーは他のエネルギー準位を有することができ、治療および診断目的にそれぞれ使用されるエネルギーを指す。いくつかの実施形態では、放射源20は、約10keV〜約20MeVの間のいずれかの範囲内の複数の光子エネルギー準位でX線放射を生成することができる。異なるエネルギー準位でX線放射を生成することができる放射源が、「RADIOTHERAPY APPARATUS EQUIPPED WITH AN ARTICULABLE GANTRY FOR POSITIONING AN IMAGING UNIT」という名称の2001年11月2日出願の米国特許出願第10/033,327号、および「MULTI-ENERGY X-RAY SOURCE」という名称の2003年10月15日出願の米国特許出願第10/687,573号に記載されている。
【0019】
制御システム18は、放射源回転制御部40に連結された、コンピュータプロセッサなどのプロセッサ54を含む。制御システム18はまた、データを表示するモニタ56と、データを入力するキーボードまたはマウスなどの入力装置58とを含んでもよい。X線投射データ(例えば、コーンビームCT画像データ)を得るための走査中、放射源20は患者16の周りを回転する。放射源20の回転および放射源20の動作は、放射源回転制御部40によって制御され、それにより、電力信号およびタイミング信号が放射源20に供給されるとともに、プロセッサ54から受け取った信号に基づいて、放射源20の回転速度および位置が制御される。制御部40は、ガントリー12およびプロセッサ54とは別個の構成要素として示されているが、代替実施形態では、制御部40は、ガントリー12またはプロセッサ54の一部であることができる。
【0020】
放射処置中、放射源20はX線ビームを生成し、それを患者16に向け、一方、検出器24は、プロセス中にX線ビームによって規定される複数の伝送パスにおけるX線吸収を測定する。検出器24は、入射するX線の強度に比例して電圧を発生させ、その電圧は、読み取られ、コンピュータにおける後に続く処理のためにデジタル化される。異なるガントリー角度における画像データが収集された後、収集データは、検査されている身体区画の密度関数の描写を構成するマトリックス(CT画像)を再構築するために処理される。そのような区画の1つまたは複数を考慮することによって、技術のある診断医は、様々な身体的な病気を診断できる場合が多い。場合によっては、1つまたは複数の区画を使用して治療計画を行うこともできる。
【0021】
図面に示されるように、放射システム10は、マーカーブロック200およびカメラ204を含むマーカーシステム200とともに使用される。カメラ204はプロセッサ54に連結され、それは、いくつかの実施形態によれば、マーカーシステム200の一部であってもよい。あるいは、プロセッサ54の代わりに、カメラ204は別のプロセッサ(図示なし)に連結されてもよい。また、他の実施形態では、マーカーシステム200はカメラ204を含まなくてもよい。使用中、マーカーブロック202は患者16に連結され(例えば、患者の胸、腹、または別の身体部分上に位置し)、カメラ204はマーカーブロック202を見るのに使用される。カメラ204は、画像データをプロセッサ504に伝送し、そこで画像データが処理されて、マーカーブロック202の位置および/または向きが判断される。
【0022】
図面に示されるように、4つのレーザー60a〜60dはシステム10に隣接して位置付けられる。レーザー60a〜60dは、それぞれのレーザービーム62a〜62dを生成するように構成され、それらレーザービームは、マーカーブロック202を(したがって、患者16を)所望位置で見当合わせするのに使用されてもよい。図示される実施形態では、レーザー60a、60bは、マーカーブロック202の向かい合った側からレーザービーム62a、62bを生成し投射するように構成され、レーザー60cは、マーカーブロック202の上方からレーザービーム62cを生成し投射するように構成され、レーザー60dは、マーカーブロック202上のある角度で下向きにレーザービーム62dを生成し投射するように構成される。他の実施形態では、レーザー60は、他の方向からレーザービーム62を投射するように構成されてもよい。各レーザー60は、壁、天井、患者支持部、または別の装置など、いずれの構造に取り付けられてもよい。4つのレーザー60が示されているが、他の実施形態では、4つよりも多数または少数のレーザー60が使用されてもよい。例えば、他の実施形態では、レーザー60a〜60cのみが使用される。
【0023】
マーカーシステム
図2は、いくつかの実施形態による図1のマーカーブロック202を示す。マーカーブロック202は、第1の表面212および第2の表面214を有する構造210と、複数のマーカー216とを含む。構造210は、プラスチック(例えば、軽量プラスチック)、または他の材料のいずれかから作ることができる。図示される実施形態では、マーカーブロック202は4つのマーカー216a〜216dを含み、マーカー216a、216bは第1の表面212上に位置し、マーカー216c、216dは第2の表面214上に位置する。他の実施形態では、マーカーブロック202は、4つよりも少数のマーカーまたは4つよりも多数のマーカーを含んでもよい。また、他の実施形態では、マーカー216の分布は図面に示されるものと異なってもよい。例えば、他の実施形態では、マーカー216aが第1の表面212上に位置してもよく、マーカー216b〜216dが第2の表面214上に位置してもよい。
【0024】
図面に示されるように、マーカー216はそれぞれ円形形状を有する。他の実施形態では、マーカー216はそれぞれ、正方形、長方形、三角形、楕円形、またはカスタマイズされた形状など、他の形状のいずれかを有することができる。さらなる実施形態では、同じ形状を有するマーカー216の代わりに、1つまたは複数のマーカー216が、残りのマーカー216とは異なる形状を有することができる。マーカー216は反射性材料から作られるので、カメラ204で「見る」ことができる。
【0025】
図示される実施形態では、マーカーブロック202はさらにマーキング218a〜218cを含む。マーキング218は、マーカーブロック202の表面上に位置するくぼみであってもよい。あるいは、マーキング218は、マーカーブロック202の表面上に堆積させたペイントまたは材料(例えば、ポリマー)であってもよい。使用中、マーキング218は、マーカーブロック202をレーザービーム62と見当合わせするのに使用され、それによって、マーカーブロック202を所定の位置および向きで設置することができる。特に、マーキング218aは、レーザービーム62aと関連付けられた目標となり、マーキング218bは、レーザービーム62bと関連付けられた目標となり、マーキング218cは、レーザービーム62c、62dと関連付けられた目標となる。
【0026】
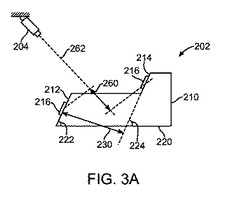
図3Aは、いくつかの実施形態による図2のマーカーブロック202の側面図を示す。図面に示されるように、構造210の第1の表面212および第2の表面214は、構造210の基部220に対して傾いている。これにより、カメラ204が検出する各マーカー216の表面積がより大きくなる(表面212、214が基部220に垂直な場合に比べて)。いくつかの実施形態では、表面212および214はそれぞれ基部220と角度222、224を成してもよく、角度222、224はそれぞれ30°〜90°の値であってもよい。他の実施形態では、マーカーブロック202に対するカメラ204の位置に応じて、角度222および224は他の値を有してもよい。例えば、角度222および224は、マーカーブロック202に対するカメラ204の高さEと、カメラ204とマーカーブロック202との間の水平距離Hとに基づいて選択されてもよい(例えば、角度222=90°-tan-1(E/H))。
【0027】
図3Aに示されるように、表面212、214は相互に平行である。マーカー216が同じ形状を有する実施形態では、そのような構成によって、カメラ204によって生成される画像フレーム内で見たときに同じ形状を有するマーカー216の画像が得られる。また、図面に示されるように、表面212、214は相互から間隔を空けている。いくつかの実施形態では、表面212、214の間の垂直間隔230は、少なくとも0.5cm、より好ましくは少なくとも1.0cm(例えば、3cm)の値であってもよい。他の実施形態では、間隔230は異なる値を有してもよい。
【0028】
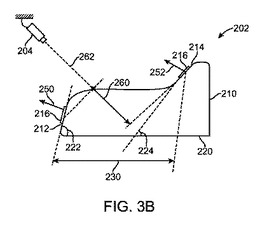
代替実施形態では、表面212、214は平行でなくてもよく、その代わりに相互に対して角度を成してもよい。図3Bは、第1の表面212の第1の法線250と第2の表面214の第2の法線252とが角度254を成す、マーカーブロック202の一変形例を示す。角度254は、0°より大きく45°未満、より好ましくは25°未満の値であってもよい。他の実施形態では、角度254は他の値を有してもよい。図面に示されるように、第1の表面212および第2の表面214は距離230だけ間隔を空けている。
【0029】
いくつかの実施形態では、カメラ204の視線方向262で測定した第1の表面212と第2の表面214との間(したがって、第1の表面212上のマーカー216と第2の表面214上の別のマーカー216との間)の間隔260が、少なくとも0.5cm、より好ましくは少なくとも1.0cm(例えば、3cm)の値であるようにマーカーブロック202に対して、カメラ204が位置付けられる。いくつかの例では、間隔260の値は間隔230の値と同じであってもよい。他の例では、間隔260の値は間隔230の値と異なってもよい。
【0030】
マーカー216が複数の面212、214上にあるマーカーブロック202は、単一の直線状の面上にあるマーカーよりも、マーカーブロック202の回転の変化を、単一のカメラ204によってより容易に検出することができるという理由で有利である。マーカーブロック202のあらゆる回転(カメラ軸の周り以外)について、カメラ204により近い面(例えば、面212)のマーカー216は、カメラ204からより離れた面(例えば、面214)のマーカー216よりも、カメラ204から見てより大きな角度を移動する。したがって、追跡システムは、所与の回転に対してすべてのマーカーがほぼ同じ角度を移動する単一面のマーカーブロックの場合よりも、回転の変化にはるかに敏感であることができる。マーカー216をマーカーブロック202の少なくとも2つの異なる面212、214上に配置することによって、マーカー216自体の法線がほぼ同じ方向を指す(例えば、カメラ204を指す)とともに、依然としてカメラ204からの深度が異なるままであることができる。いくつかの実施形態では、2つの別個のマーカー216が面するそれぞれの方向が30°以上異ならない、より好ましくは15°以上異ならないとき、2つのマーカー216がほぼ同じ方向に面していると見なされる。
【0031】
さらに、マーカー216が複数の面212、214上にあるマーカーブロック202は、すべてのマーカーが1つの直線状の面上にあるマーカーブロックの場合に存在する特定の曖昧さを回避する。図8は、そのような原理を示す。マーカーブロック202を所与とすると、カメラ204は、カメラ204で見たマーカーの画像901を形成する。画像901を所与とすると、ブロックの向きは2つの異なる形902a、902bに解釈することができることに留意されたい。したがって、利用可能な画像901は、マーカーブロック202の位置の曖昧さをもたらす。複数面のマーカーブロック202は、画像の2つの面の間の関係が構造210の向きに応じて異なるので、この曖昧さを回避する。したがって、図8の例に示される曖昧さが回避される。
【0032】
図4Aおよび4Bは、カメラ408の一実施形態を示す。カメラ408は、図1に示されるカメラ204の一例であってもよい。カメラ408は、1つまたは複数の光電陰極と1つまたは複数のCCD素子とを有する電荷結合素子(「CCD」)カメラである。CCD素子は、局部に電荷を蓄え、適切な制御信号に対してその電荷を読出しポイントに伝達することができる半導体素子である。画像化すべき光子が光電陰極に集中すると、カメラが受け取った光強度に比例して電子が発散される。電子は、CCD素子内に位置する電荷バケット内に捕捉される。電荷バケット内の捕捉電子の分布は、カメラが受け取った画像を現す。CCDは、これらの電子をアナログデジタル変換器に伝達する。アナログデジタル変換器の出力は、ビデオ画像を処理し、再帰反射マーカー406の位置を計算するため、コンピュータ410に送信される。いくつかの実施形態によれば、カメラ408は、RS-170出力と640×480ピクセルの解像度とを有する白黒CCDカメラである。あるいは、カメラ408は、CCIR出力と756×567ピクセルの解像度とを有するCCDカメラを含むことができる。
【0033】
図示される実施形態では、赤外線照明器602(「IR照明器」)がカメラ408と同じ位置に配置される。IR照明器602は、カメラ408と同じ方向に向いた1つまたは複数の赤外光ビームを発生させる。IR照明器602は、カメラ本体608のレンズ606の周囲でリング状にされた表面を含む。IR照明器602の表面は、赤外光を発生させる複数の個々のLED素子604を含む。LED素子604は、IR照明器602上に螺旋パターンで配置される。他の実施形態では、LED素子604は他のパターンで配置されてもよい。カメラ408の一部であってもよい赤外フィルタは、赤外光に対するカメラの感度を上げるために除去されるか、または使用不能にされる。
【0034】
動作の際、1つまたは複数の照明源(好ましい実施形態では、赤外光源)は、患者支持体14上の患者16に光を投射する。生成された光はマーカー216から反射され、それによってこれらマーカー216の位置を示す。患者16に向けられたカメラ204は、マーカー216からの反射光を捕捉し検出する。カメラ204は、そのビデオフレーム内のマーカー216の位置を示すビデオ画像を生成する。生成されたビデオ画像は、さらなる処理のためにプロセッサ54(または別のプロセッサ)に送信される。
【0035】
プロセッサ54(または別のプロセッサ)は、カメラ204からビデオ画像を受け取る。プロセッサ54は、まず、カメラ204からの各ビデオ画像を処理して、画像フレーム内のマーカー216の画像を識別する。次に、決定したマーカー216の位置と、マーカー216中の既知の相対位置とに基づいて、プロセッサ54は、マーカーブロック202の位置(X,Y,Z)および/または向き(θX,θY,θZ)を決定する。いくつかの実施形態では、マーカーブロック202の位置および/または向きの演算を容易にするため、カメラ204の位置および向きに関する情報がプロセッサ54に与えられる。
【0036】
マーカー216がビデオフレームのいかなる場所にも現れることがあり、マーカー216の位置を決定するには、ビデオフレームの画像要素をすべて検査しなければならないことがあるという点で、マーカー216の追跡は非効率的である可能性がある。したがって、一実施形態では、マーカー216の位置の最初の決定には、ビデオフレーム内の画像要素をすべて検査することを伴う。ビデオフレームが640×480の画像要素を含む場合、307200(640×480)の画像要素をすべて最初に検査して、マーカー216の位置が求められる。
【0037】
マーカー216のリアルタイム追跡の場合、ビデオフレームごとにすべての画像要素を検査して、リアルタイムでマーカー216の位置を決定するには、相当量のシステム資源を消費する場合がある。したがって、一実施形態では、マーカー216のリアルタイム追跡は、本明細書では「トラッキングゲート(tracking gate)」と呼ばれる、ビデオフレーム内の既に識別されたマーカー216の位置の推定に基づいて設置される、ビデオフレームの小さい領域を処理することによって容易にすることができる。マーカー216の既に決定された位置を使用して、その同じマーカーについて最初の探索範囲(すなわち、トラッキングゲート)が定義される。トラッキングゲートは、マーカー216の以前の位置を中心とした、ビデオフレームの比較的小さい部分である。トラッキングゲートは、マーカー216の新しい位置を含まない場合にのみ拡張される。一例として、特定のマーカーの既に決定された位置がビデオフレーム内の画像要素(50,50)であるときの状況について考慮する。トラッキングゲートがビデオフレームの50×50の範囲に限定されている場合、この例のトラッキングゲートは、座標(25,50)、(75,50)、(50,25)、および(50,75)によって定義される範囲内に拘束される画像要素を含む。マーカー216がこのトラッキングゲート内で見つからない場合のみ、ビデオフレームの他の部分が探索される。
【0038】
いくつかの実施形態では、次に、マーカーブロック202の決定された位置および/または向きを使用して、患者16を所望の位置および/向きで位置付けることができる。例えば、マーカーブロック202の決定された位置は、マーカーブロック202の所定位置と比較されてもよい。そのような場合、マーカーブロック202の決定された位置が所定位置と一致する場合、患者16は正確に位置付けられていると見なされる。他方では、マーカーブロック202の決定された位置が所定位置と一致しない場合、患者16は、マーカーブロック202の位置が所定位置と一致するまで位置付けられる(例えば、患者支持体14を移動させることによって)。
【0039】
他の実施形態では、マーカーブロック202の決定された位置および/または向きを使用して、患者16の少なくとも一部分の位置を決定することができる。そのような場合、マーカーブロック202と患者16との相対的な空間的関係は分かっているか、または予め定められる。そのため、マーカーブロック202位置が決定されれば、マーカーブロック202と患者16との相対的な空間的関係に基づいて、患者16のその部分の位置を決定することができる(例えば、プロセッサ54によって)。いくつかの実施形態では、患者16の部分の位置をリアルタイムで継続的に決定することによって、患者16の部分をリアルタイムで追跡することができる。患者16の追跡された位置は、システム10によって提供される放射の適用をゲート制御するのに使用されてもよい。さらなる実施形態では、患者16の追跡された位置は、強度変調放射線治療(IMRT)を行いながら、標的部位の追跡を行うのに使用されてもよい。IMRTでは、治療セッション中、標的部位の第1の部分が標的部位の第2の部分よりも多くの放射を受けるようにして、多分割コリメータ(multi-leaf collimator)が操作される。
【0040】
さらなる実施形態では、マーカーブロック202の決定された位置を使用して、患者16が行った活動のレベルを決定することができる。例えば、マーカーブロック202が患者の胸部上に設置された場合、マーカーブロック202の決定された位置を使用して、患者16が行った呼吸のレベルを決定することができる。場合によっては、ある期間にわたるマーカーブロック202の複数の位置を決定することによって、プロセッサ54は、その期間内の様々な時点における患者の呼吸レベルに対応する複数の振幅ポイントを得るように構成することができる。決定された振幅ポイントを使用して、治療のための患者16に対する治療放射線の適用をゲート制御する、または画像化目的での患者16に対するイメージング放射の適用をゲート制御するなど、処置の実行をゲート制御してもよい。他の実施形態では、マーカーブロック202(もしくは振幅ポイント)の決定された位置を使用して、リアルタイムで、または画像データが得られた後に、画像データのビニング(binning)をゲート制御してもよい。さらなる実施形態では、振幅ポイントを使用して、IMRTを行いながら、標的部位の追跡を行ってもよい。
【0041】
さらなる実施形態では、ある期間にわたるマーカーブロック202の複数の位置を決定することによって、プロセッサ54は、様々な時点における呼吸周期の異なる完全性のレベルに対応する複数の位相点を得るように構成することができる。例えば、位相値は0°〜360°の値(0°は呼吸周期の開始を表し、360°は呼吸周期の終了を表す)を有してもよい。決定された位相値を使用して、治療のための患者16に対する治療放射線の適用をゲート制御する、または画像化目的での患者16に対するイメージング放射の適用をゲート制御するなど、処置の実行をゲート制御してもよい。他の実施形態では、決定された位相値を使用して、リアルタイムで、または画像データが得られた後に、画像データのビニングをゲート制御してもよい。さらなる実施形態では、位相値を使用して、IMRTを行いながら、標的部位の追跡を行ってもよい。
【0042】
マーカーブロック202を使用することの1つの利点は、マーカーブロック202上での基準位置216の相対位置が演繹的に分かっていれば、単一のカメラ視野からマーカーブロック202の6つの自由度(X、Y、Z、θX、θY、θZ)をすべて決定するのが可能であることである。換言すれば、マーカーブロック202の絶対座標を導き出すのに単一のカメラのみがあればよい。これは、マーカーブロック202上のマーカー216間の相対的な位置付けが分かっており、カメラ204の絶対座標および視線の向きも分かっているためである。カメラ204が検出したマーカーブロック202の画像は、カメラの視線の向きに対する可視の基準位置216の位置付けを示す。マーカー216間の実際の相対位置が分かっているので、カメラ画像から検出されたマーカー216の相対座標を使用して、マーカーブロック202の絶対座標を導き出すことができる。マーカーブロック202はまた、その構成によって、カメラ204がマーカー216を正確に検出できるという理由で有利である。
【0043】
マーカーシステム200は1つのカメラ204を有するものとして記載してきたが、他の実施形態では、マーカーシステム200は2つ以上のカメラを有することができる。例えば、代替実施形態では、マーカーシステム200はマーカー216を検出する2つのカメラを含んでもよい。そのような場合、プロセッサ54は、2つのカメラから画像データを受け取り、当該分野において知られているような三角測量技術を使用して、マーカーブロック202の位置を決定する。また、他の実施形態では、カメラの代わりに、マーカーシステム200は、マーカー216を検出することができる他のタイプの光学装置を含んでもよい。
【0044】
他の実施形態では、上述の実施例に示される形状の代わりに、マーカーブロック202は異なる形状を有することができる。図5は、その表面上に位置するマーカー216で構成される複数の基準位置を備えた円形形状を有するマーカーブロック202の一実施形態を示す。図6は、その表面に付着させた複数のマーカー216で構成される半球形状を有する代替のマーカーブロック202を示す。
【0045】
図7は、他の実施形態によるマーカーブロック202の変形例を示す。図示される実施形態では、マーカーブロック202は表面212を有し、マーカー216a、216bは表面212上に位置する。マーカー216aは法線300aを有し、マーカー216bは法線300bを有する。いくつかの実施形態では、各法線300は、マーカー216をそこから見ることが意図される方向を指すベクトルである。あるいは、各法線300は、マーカー216の照射領域がその上で最大限になる方向を指すベクトルとして定義されてもよい。図面に示されるように、法線300a、300bは相互に平行である。あるいは、法線300a、300bは、45°未満、より好ましくは25°未満の角度を成してもよい。
【0046】
図示される実施形態では、マーカー216bは、マーカー216aと交差し、法線300aに垂直な面302から距離230で間隔が空けられる。そのような構成では、マーカー216a、216bは相互から間隔が空けられる。いくつかの実施形態では、距離230は、少なくとも0.5cm、より好ましくは少なくとも1.0cmである。やはり図面に示されるように、表面212は基部220と角度222を成す。いくつかの実施形態では、マーカー216a、216bがほぼカメラ204に向けられるようにして、角度222が選択される。他の実施形態では、角度222はカメラ204の位置を考慮せずに予め定められてもよい。そのような場合、マーカーブロック202を使用するとき、マーカー216a、216bがほぼカメラ204に面するようにしてカメラ204が位置付けられる。いくつかの実施形態では、カメラ204の視線方向で測定したマーカー216a、216bの間の距離が少なくとも0.5cm、より好ましくは少なくとも1.0cmであるようにして、カメラ204がマーカーブロック202に対して位置付けられる。
【0047】
他の実施形態では、マーカーブロック202は特定の身体部分に適合する形状で形成することができる。例えば、身体上の特定位置に一致する型またはキャストをマーカーブロック202として用いることができる。身体の特定領域に適合するように形作られたマーカーブロック202によって、患者の特定位置におけるマーカーブロック202の反復可能な配置が容易になる。あるいは、マーカーブロック202は、患者の身体に付着させた特定の固定具に適合するように形成することができる。例えば、マーカーブロック202は、それを眼鏡に付着させることを可能にするくぼみおよび溝の中に形成することができる。さらに別の実施形態では、マーカー216をその上に有するマーカーブロック(1つまたは複数)202と一体で形成される。
【0048】
上述の実施形態では、マーカー216は患者16の外部にある。しかし、代替実施形態では、マーカー216は患者16の体内に位置してもよい。そのような場合、マーカーブロック202は、患者16の体内の標的部位に位置させることができるようにサイズ決めされる。マーカー216は、マーカー216を検出するのに用いられている画像化技術に適した材料から作ることができる。マーカー216の検出は、超音波画像診断、CT画像診断、X線透視、およびPET画像診断など、当該技術において知られている画像化技術のいずれかを使用して達成することができる。
【0049】
さらなる実施形態では、ヒト以外の対象である構造210の代わりに、構造210は患者16の一部分であってもよい。そのような場合、第1の表面212は患者16の第1の部分であり、第2の表面214は患者16の第2の部分であり、マーカー216は、患者16の部分に固定されるか、またはその上に位置する。例えば、インクマーキングが、マーカー216として機能するように患者16上に位置してもよい。
【0050】
さらなる実施形態では、マーカー216は患者16の部分であってもよい。例えば、患者16上の目印がマーカー216として使用されてもよい。
【0051】
また、異なる実施形態ではマーカーシステム200を異なるシステムとともに使用できることが、当業者には理解されるはずである。例えば、放射システム10は、必ずしも治療装置でなくてもよく、放射線ビームを生成することができるいかなる機械であってもよい。いくつかの実施形態では、放射システム10は、CT画像診断装置(例えば、コーンビームCT装置)、断層撮影装置、MRI装置、Cアームに基づくX線画像診断装置、三次元血管撮影装置、もしくはPET装置など、いかなるタイプの画像化装置または光学装置であってもよい。さらに、他の実施形態では、本明細書に記載するマーカーシステム200および/または方法のいずれかを、位置決め装置もしくは画像化能力を有さない治療装置など、画像化以外の装置とともに使用することができる。さらなる実施形態では、本明細書に記載するマーカーシステム200および/または方法のいずれかを、複数の放射線源を有する装置とともに使用することができる。例えば、装置は、診断放射線(例えば、キロ電子ボルト範囲のエネルギーレベルを有する放射線)を送達するための第1の放射線源と、治療放射線(例えば、メガ電子ボルト範囲のエネルギーレベルを有する放射線)を送達するための第2の放射線源とを有することができる。別の実施例として、装置は、複数の診断用放射線源および/または1つもしくは複数の治療放射線源を有することもできる。
【0052】
コンピュータシステムアーキテクチャ
図9は、本明細書に記載する様々な実施形態を実施するのに使用することができる、コンピュータシステム1600の一実施形態を示すブロック図である。コンピュータシステム1600は、情報を通信するためのバス1602または他の通信機構と、バス1602と連結された、情報を処理するためのプロセッサ1604とを含む。プロセッサ1604は、図1のプロセッサ54の一例であってもよく、または本明細書に記載するあらゆるプロセッサの一例であってもよい。コンピュータシステム1600はまた、バス1602に連結された、情報およびプロセッサ1604によって実行される命令を格納するための、ランダムアクセスメモリ(RAM)または他の動的記憶装置などの主メモリ1606を含む。主メモリ1606はまた、プロセッサ1604によって実行される命令の実行中に一時変数または他の中間情報を格納するのに使用されてもよい。コンピュータシステム1600はさらに、バス1602に連結された、静的情報およびプロセッサ1604用の命令を格納するための読出し専用メモリ(ROM)1608または他の静的記憶装置を含む。情報および命令を格納するための、磁気ディスクまたは光ディスクなどのデータ記憶装置1610が設けられ、バス1602に連結される。
【0053】
コンピュータシステム1600は、バス1602を介して、ユーザに対して情報を表示するための陰極線管(CRT)などの表示装置167に連結されてもよい。情報およびコマンド選択をプロセッサ1604に通信するための、英数字キーおよび他のキーを含む入力装置1614がバス1602に連結される。別のタイプのユーザ入力装置は、方向情報およびコマンド選択をプロセッサ1604に通信するための、ならびに表示装置167上におけるカーソルの動きを制御するための、マウス、トラックボール、またはカーソル方向キーなどのカーソル制御部1616である。この入力装置は、一般的に、装置が面内における位置を指定できるようにする、第1の軸線(例えば、x)と第2の軸線(例えば、y)との2つの軸線での2つの自由度を有する。
【0054】
いくつかの実施形態では、コンピュータシステム1600を使用して、本明細書に記載する様々な機能を行うことができる。いくつかの実施形態によれば、そのような使用は、主メモリ1606に含まれる1つまたは複数の命令の1つまたは複数のシーケンスをプロセッサ1604が実行するのに応答して、コンピュータシステム1600によってもたらされる。当業者であれば、本明細書に記載する機能および方法に基づいて、そのような命令をどのように準備するかが分かるであろう。そのような命令は、記憶装置1610などの別のコンピュータ可読媒体から主メモリ1606に読み込まれてもよい。主メモリ1606に含まれる命令のシーケンスを実行することによって、プロセッサ1604が、本明細書に記載するプロセス工程を実行する。また、多重処理装置の1つまたは複数のプロセッサを用いて、主メモリ1606に含まれる命令のシーケンスを実行してもよい。代替実施形態では、ソフトウェア命令の代わりに、またはそれらと組み合わせて固定配線回路構成を使用して、本明細書に記載する様々な実施形態を実現してもよい。したがって、実施形態は、ハードウェア回路構成およびソフトウェアのいかなる特定の組合せにも限定されない。
【0055】
本明細書で使用する用語「コンピュータ可読媒体」は、プロセッサ1604に実行用の命令を供給するのに関与するあらゆる媒体を指す。そのような媒体は、不揮発性媒体、揮発性媒体、および伝送媒体を含むがそれらに限定されない多くの形態を成してもよい。不揮発性媒体としては、例えば、記憶装置1610などの光学ディスクまたは磁気ディスクが挙げられる。揮発性媒体としては、主メモリ1606などの動的記憶装置が挙げられる。送信媒体としては、バス1602を含むワイヤを含む、同軸ケーブル、銅線、および光ファイバが挙げられる。送信媒体はまた、電波および赤外線データの通信中に生成されるものなど、音波または光波の形態を成すことができる。
【0056】
コンピュータ可読媒体の一般的な形態としては、例えば、フロッピー(登録商標)ディスク、フレキシブルディスク、ハードディスク、磁気テープ、または他のあらゆる磁気媒体、CD-ROM、他のあらゆる光学媒体、パンチカード、紙テープ、穴のパターンを備えた他の物理的媒体、RAM、PROM、EPROM、FLASH-EPROM、他のあらゆるメモリチップもしくはカートリッジ、後述するような搬送波、あるいはコンピュータが読み取ることができる他のあらゆる媒体が挙げられる。
【0057】
様々な形態のコンピュータ可読媒体は、実行のために1つまたは複数の命令の1つまたは複数のシーケンスをプロセッサ1604に伝達することに関係してもよい。例えば、命令は、最初に、遠隔コンピュータの磁気ディスク上にあってもよい。遠隔コンピュータは、その動的記憶装置に命令をロードし、モデムを使用して電話回線を通じて命令を送信することができる。コンピュータシステム1600に近いモデムは、電話回線上のデータを受信し、赤外線送信機を使用して、データを赤外線信号に変換することができる。バス1602に連結された赤外線検出器は、赤外線信号の形で伝達されたデータを受信し、データをバス1602上に位置させることができる。バス1602は、データを主メモリ1606に伝達し、そこからプロセッサ1604が命令を検索し実行する。主メモリ1606が受信した命令は、任意に、プロセッサ1604による実行前または実行後のどちらかで、記憶装置1610に格納されてもよい。
【0058】
コンピュータシステム1600はまた、バス1602に連結された通信インターフェース1618を含む。通信インターフェース1618は、ローカルネットワーク1622に接続されたネットワークリンク1620に対して双方向データ通信カップリングを提供する。例えば、通信インターフェース1618は、対応するタイプの電話回線に対してデータ通信接続を提供する、総合サービスデジタル網(ISDN)カードまたはモデムであってもよい。別の例として、通信インターフェース1618は、互換性をもつLANに対してデータ通信接続を提供する、ローカルエリアネットワーク(LAN)カードであってもよい。無線リンクも実装されてもよい。任意のそのような実装において、通信インターフェース1618は、様々なタイプの情報を表すデータストリームを伝達する、電気信号、電磁信号、または光学信号を送受信する。
【0059】
ネットワークリンク1620は、一般的に、他の装置に対して1つまたは複数のネットワークを通してデータ通信を提供する。例えば、ネットワークリンク1620は、ホストコンピュータ1624に対する、または放射線ビーム源もしくは放射線ビーム源に動作可能に連結されたスイッチなどの機器1626に対して、ローカルネットワーク1622を通して接続を提供してもよい。ネットワークリンク1620を通じて転送されるデータストリームは、電気信号、電磁信号、または光学信号を含むことができる。様々なネットワークを通る信号、ならびにネットワークリンク1620上の、かつコンピュータシステム1600とデータのやり取りをする通信インターフェース1618を通る信号は、情報を転送する搬送波の代表的形態である。コンピュータシステム1600は、ネットワーク(1つまたは複数)、ネットワークリンク1620、および通信インターフェース1618を通して、メッセージを送信し、プログラムコードを含むデータを受信することができる。
【0060】
特定の実施形態を図示し記載してきたが、それらは本発明を限定するものではないことが理解されるであろう。また、本発明の趣旨および範囲から逸脱することなく、様々な変更および修正を行ってもよいことが当業者には明白となるであろう。例えば、本明細書で使用されるとき、用語「画像」は、回路構成またはコンピュータ可読媒体に格納されてもよい画像データを含み、視覚的に表示される画像データに限定されるべきではない。したがって、明細書および図面は、限定的な意味ではなく例証的な意味で考慮されるべきである。本発明は、請求項によって規定される本発明の趣旨および範囲に含まれてもよい、代替例、修正例、および等価物を包含するものとする。
【符号の説明】
【0061】
60a,60b,60c,60d レーザー
62a,62b,62c,62d レーザービーム
202 マーカーブロック
210 構造
212 第1の表面
214 第2の表面
216a,216b,216c,216d マーカー
218 マーキング
【技術分野】
【0001】
関連出願データ
本出願は、2007年5月14日出願の米国特許出願第11/748,406号に関連し、その全開示を引用により本明細書に明示的に組み込む。
【0002】
本出願は、マーカーシステムに関し、より具体的には、医療分野で使用されるマーカーシステムに関する。
【背景技術】
【0003】
放射線治療は、がん性腫瘍など、人体の特定領域を高い照射量に選択的に暴露する医療処置を伴う。放射線治療の目的は、有害組織が破壊されるように、標的の生体組織を照射することである。特定のタイプの放射線治療では、不必要な放射線損傷を健康な組織に与えることを回避するため、照射体積を腫瘍または標的組織部位のサイズおよび形状に制限することができる。例えば、原体照射法(conformal therapy)は、治療体積を標的腫瘍により緊密に合致させることによって、線量分布を最適化するために用いられる場合が多い放射線治療技術である。
【0004】
正常な生理学的運動は、従来の放射線治療および原体照射法の臨床計画および送達における制限を表す。呼吸または心臓の運動などの正常な生理学的運動は、照射を受ける腫瘍または組織部位の位置の移動を生じさせる場合がある。放射線ビームが、治療体積を腫瘍の正確な寸法に合致させるように形作られている場合、治療中のその腫瘍の運動によって、放射線ビームが標的の腫瘍組織を完全に網羅するのに十分なサイズまたは形状とならない場合がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許出願公開第11/748,406号明細書
【特許文献2】米国特許出願公開第10/033,327号明細書
【特許文献3】米国特許出願公開第10/687,573号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
この問題に対処するため、放射線ビームのサイズおよび/または形状は、標的組織の完全な照射を維持するように「移動マージン」(すなわち、標的組織がいずれかの方向に移動する予測距離)分だけ拡張することができる。この方策の欠点は、この照射体積の増加によって、拡張した体積の範囲内に位置する他の健康な組織に放射線が適用されてしまうことである。換言すれば、治療中の移動には、拡張されたサイズの放射線照射野を適用する必要があり、それが、標的治療体積を取り囲む正常な組織の容認できない大きな体積に悪影響を与える可能性がある。
【0007】
この問題に対する別の方策は、患者の身体の運動に同調させたゲート制御(gating)信号を用いて、治療中の放射線ビームの生理学的ゲート制御を伴う。この方策では、検査中の特定の生理学的運動を参照して患者の生理学的状態を測定する機器が利用される。例えば、呼吸は、患者の体内における肺腫瘍の位置の動きを引き起こすことが示されている。放射線治療が肺腫瘍に適用されている場合、温度センサ、歪みゲージ、または呼吸気流計(preumotactrograph)を患者に取り付けて、患者の呼吸周期を測定することができる。呼吸周期において肺腫瘍の過剰な動きに対応する期間中は放射線ビームが中断されるように、測定された呼吸周期内の特定の閾値点に基づいて放射線ビームをゲート制御することができる。
【0008】
現在、放射線適用の生理学的ゲート制御を正確に一貫して実行できるようにする方法およびシステムが必要とされている。
【課題を解決するための手段】
【0009】
いくつかの実施態様によれば、マーカーシステムは、第1の表面および第2の表面と、第1の表面上に位置する第1のマーカーと、第2の表面上に位置する第2のマーカーとを有する構造を含み、第1のマーカーおよび第2のマーカーはほぼ同じ方向に面するように配置され、それによって光学装置によって同時に見ることができ、第1および第2のマーカーを光学装置によって同時に見たとき、第1のマーカーと光学装置との間の第1の距離は第2のマーカーと光学装置との間の第2の距離とは異なる。
【0010】
他の実施態様によれば、マーカーシステムは、ベースと、第1の表面と、第2の表面とを有する構造を含み、第1の表面はベースに対して角度を形成し、角度は30°〜90°の値であり、第1のマーカーは第1の表面上に位置し、第2のマーカーは第2の表面上に位置し、第1の表面は平面領域を有し、平面領域は第1のマーカーがカバーする面積よりも大きい面積を有する。
【0011】
他の実施態様によれば、光学装置を有するマーカーシステムを使用する方法は、第1のマーカーを第1の位置に設置するステップと、第2のマーカーを第2の位置に設置するステップとを含み、第1のマーカーおよび第2のマーカーは、光学装置の視線方向で測定した第1のマーカーと第2のマーカーとの間の距離が少なくとも0.5cmであるようにして設置される。
【0012】
他の実施態様によれば、マーカーシステムは、第1の法線を有する第1のマーカーと、第2の法線を有する第2のマーカーとを含み、第1の法線および第2の法線は15°未満の角度を形成し、第2のマーカーは、第1の法線に垂直であって第1のマーカーと交差する面から間隔を空けられる。
【0013】
本発明の他の態様および特徴は、本発明を限定するのではなく例示することを意図する好ましい実施形態の以下の詳細な説明を読むことによって明白になるであろう。
【図面の簡単な説明】
【0014】
【図1】本明細書に記載するマーカーシステムの実施形態とともに使用されてもよい放射システムを示す図である。
【図2】いくつかの実施形態によるマーカーブロックの一例を示す図である。
【図3A】いくつかの実施形態による図2のマーカーブロックの側面視である。
【図3B】他の実施形態による図2のマーカーブロックの側面図である。
【図4A】カメラの側面図である。
【図4B】図4Aのカメラの正面図である。
【図5】他の実施形態によるマーカーブロックを示す図である。
【図6】他の実施形態によるマーカーブロックを示す図である。
【図7】他の実施形態によるマーカーブロックを示す図である。
【図8】共通の直線面上にマーカーを有するマーカーブロックの一例を示す図である。
【図9】本明細書に記載する実施形態とともに実現されてもよいコンピュータシステムのブロック図である。
【発明を実施するための形態】
【0015】
図面は、好ましい実施形態の設計および有用性を示し、図面中、類似の要素は共通の参照番号によって参照する。実施形態の利点および目的がどのようにして得られるかをより良く理解するため、実施形態のさらに具体的な説明を添付図面に例示する。
【0016】
以下、様々な実施形態を図面を参照して記載する。図面は縮尺どおりに描かれているものではなく、類似の構造または機能の要素は、図面全体を通して同様の参照番号で表されることに留意されたい。また、図面は、単に、特定の実施形態について記載するのを容易にするためのものであることに留意されたい。それら図面は、本発明の包括的な説明として、または本発明の範囲に対する限定として意図されるものではない。それに加えて、特定の実施形態と併せて記載される態様は、必ずしもその実施形態に限定されるものではなく、他のいずれの実施形態においても実施することができる。
【0017】
放射システム
図1は、放射システム10を示す。システム10は、開口部(または穴)13を有するガントリー12と、患者16を支持する患者支持部14と、ガントリー12の動作を制御する制御システム18とを含む。図示される実施形態では、ガントリー12は、スリップリング構造(ドーナツ形状)を有する。あるいは、ガントリー12は、C-アーム構造などの他の構造を有することができる。システム10はまた、患者16に向けて放射線ビームを投射する放射源(例えば、X線源)20と、ビームの形状を変えるコリメータ21とを含む。システム10はまた、ガントリー12の反対側に検出器24を含み、それは、場合によっては、患者16から出る放射を受け取り、受け取った放射を使用して画像(1つまたは複数)を生成するのに使用されてもよい。検出器24は、患者16を通り抜けるX線を感知するために構成された複数のセンサ素子を有する。各センサ素子は、X線ビームが患者16を通り抜けると、その強度を表す電気信号を生成する。他の実施形態では、システム10は検出器24を含まない。
【0018】
図示される実施形態では、放射源20は、治療エネルギーを供給する治療放射源である。他の実施形態では、放射源20は、診断エネルギー(例えば、画像を生成するのに適したエネルギー)を供給する診断放射源であってもよい。さらなる実施形態では、放射源20は、治療エネルギーおよび診断エネルギーを選択的に供給するように構成することができる。いくつかの実施形態では、治療エネルギーは、一般に160キロ電子ボルト(keV)以上、より一般的には1メガ電子ボルト(MeV)以上であり、診断エネルギーは、一般に、高エネルギー範囲を下回るエネルギーであり、より一般的には160keV未満である。他の実施形態では、治療エネルギーおよび診断エネルギーは他のエネルギー準位を有することができ、治療および診断目的にそれぞれ使用されるエネルギーを指す。いくつかの実施形態では、放射源20は、約10keV〜約20MeVの間のいずれかの範囲内の複数の光子エネルギー準位でX線放射を生成することができる。異なるエネルギー準位でX線放射を生成することができる放射源が、「RADIOTHERAPY APPARATUS EQUIPPED WITH AN ARTICULABLE GANTRY FOR POSITIONING AN IMAGING UNIT」という名称の2001年11月2日出願の米国特許出願第10/033,327号、および「MULTI-ENERGY X-RAY SOURCE」という名称の2003年10月15日出願の米国特許出願第10/687,573号に記載されている。
【0019】
制御システム18は、放射源回転制御部40に連結された、コンピュータプロセッサなどのプロセッサ54を含む。制御システム18はまた、データを表示するモニタ56と、データを入力するキーボードまたはマウスなどの入力装置58とを含んでもよい。X線投射データ(例えば、コーンビームCT画像データ)を得るための走査中、放射源20は患者16の周りを回転する。放射源20の回転および放射源20の動作は、放射源回転制御部40によって制御され、それにより、電力信号およびタイミング信号が放射源20に供給されるとともに、プロセッサ54から受け取った信号に基づいて、放射源20の回転速度および位置が制御される。制御部40は、ガントリー12およびプロセッサ54とは別個の構成要素として示されているが、代替実施形態では、制御部40は、ガントリー12またはプロセッサ54の一部であることができる。
【0020】
放射処置中、放射源20はX線ビームを生成し、それを患者16に向け、一方、検出器24は、プロセス中にX線ビームによって規定される複数の伝送パスにおけるX線吸収を測定する。検出器24は、入射するX線の強度に比例して電圧を発生させ、その電圧は、読み取られ、コンピュータにおける後に続く処理のためにデジタル化される。異なるガントリー角度における画像データが収集された後、収集データは、検査されている身体区画の密度関数の描写を構成するマトリックス(CT画像)を再構築するために処理される。そのような区画の1つまたは複数を考慮することによって、技術のある診断医は、様々な身体的な病気を診断できる場合が多い。場合によっては、1つまたは複数の区画を使用して治療計画を行うこともできる。
【0021】
図面に示されるように、放射システム10は、マーカーブロック200およびカメラ204を含むマーカーシステム200とともに使用される。カメラ204はプロセッサ54に連結され、それは、いくつかの実施形態によれば、マーカーシステム200の一部であってもよい。あるいは、プロセッサ54の代わりに、カメラ204は別のプロセッサ(図示なし)に連結されてもよい。また、他の実施形態では、マーカーシステム200はカメラ204を含まなくてもよい。使用中、マーカーブロック202は患者16に連結され(例えば、患者の胸、腹、または別の身体部分上に位置し)、カメラ204はマーカーブロック202を見るのに使用される。カメラ204は、画像データをプロセッサ504に伝送し、そこで画像データが処理されて、マーカーブロック202の位置および/または向きが判断される。
【0022】
図面に示されるように、4つのレーザー60a〜60dはシステム10に隣接して位置付けられる。レーザー60a〜60dは、それぞれのレーザービーム62a〜62dを生成するように構成され、それらレーザービームは、マーカーブロック202を(したがって、患者16を)所望位置で見当合わせするのに使用されてもよい。図示される実施形態では、レーザー60a、60bは、マーカーブロック202の向かい合った側からレーザービーム62a、62bを生成し投射するように構成され、レーザー60cは、マーカーブロック202の上方からレーザービーム62cを生成し投射するように構成され、レーザー60dは、マーカーブロック202上のある角度で下向きにレーザービーム62dを生成し投射するように構成される。他の実施形態では、レーザー60は、他の方向からレーザービーム62を投射するように構成されてもよい。各レーザー60は、壁、天井、患者支持部、または別の装置など、いずれの構造に取り付けられてもよい。4つのレーザー60が示されているが、他の実施形態では、4つよりも多数または少数のレーザー60が使用されてもよい。例えば、他の実施形態では、レーザー60a〜60cのみが使用される。
【0023】
マーカーシステム
図2は、いくつかの実施形態による図1のマーカーブロック202を示す。マーカーブロック202は、第1の表面212および第2の表面214を有する構造210と、複数のマーカー216とを含む。構造210は、プラスチック(例えば、軽量プラスチック)、または他の材料のいずれかから作ることができる。図示される実施形態では、マーカーブロック202は4つのマーカー216a〜216dを含み、マーカー216a、216bは第1の表面212上に位置し、マーカー216c、216dは第2の表面214上に位置する。他の実施形態では、マーカーブロック202は、4つよりも少数のマーカーまたは4つよりも多数のマーカーを含んでもよい。また、他の実施形態では、マーカー216の分布は図面に示されるものと異なってもよい。例えば、他の実施形態では、マーカー216aが第1の表面212上に位置してもよく、マーカー216b〜216dが第2の表面214上に位置してもよい。
【0024】
図面に示されるように、マーカー216はそれぞれ円形形状を有する。他の実施形態では、マーカー216はそれぞれ、正方形、長方形、三角形、楕円形、またはカスタマイズされた形状など、他の形状のいずれかを有することができる。さらなる実施形態では、同じ形状を有するマーカー216の代わりに、1つまたは複数のマーカー216が、残りのマーカー216とは異なる形状を有することができる。マーカー216は反射性材料から作られるので、カメラ204で「見る」ことができる。
【0025】
図示される実施形態では、マーカーブロック202はさらにマーキング218a〜218cを含む。マーキング218は、マーカーブロック202の表面上に位置するくぼみであってもよい。あるいは、マーキング218は、マーカーブロック202の表面上に堆積させたペイントまたは材料(例えば、ポリマー)であってもよい。使用中、マーキング218は、マーカーブロック202をレーザービーム62と見当合わせするのに使用され、それによって、マーカーブロック202を所定の位置および向きで設置することができる。特に、マーキング218aは、レーザービーム62aと関連付けられた目標となり、マーキング218bは、レーザービーム62bと関連付けられた目標となり、マーキング218cは、レーザービーム62c、62dと関連付けられた目標となる。
【0026】
図3Aは、いくつかの実施形態による図2のマーカーブロック202の側面図を示す。図面に示されるように、構造210の第1の表面212および第2の表面214は、構造210の基部220に対して傾いている。これにより、カメラ204が検出する各マーカー216の表面積がより大きくなる(表面212、214が基部220に垂直な場合に比べて)。いくつかの実施形態では、表面212および214はそれぞれ基部220と角度222、224を成してもよく、角度222、224はそれぞれ30°〜90°の値であってもよい。他の実施形態では、マーカーブロック202に対するカメラ204の位置に応じて、角度222および224は他の値を有してもよい。例えば、角度222および224は、マーカーブロック202に対するカメラ204の高さEと、カメラ204とマーカーブロック202との間の水平距離Hとに基づいて選択されてもよい(例えば、角度222=90°-tan-1(E/H))。
【0027】
図3Aに示されるように、表面212、214は相互に平行である。マーカー216が同じ形状を有する実施形態では、そのような構成によって、カメラ204によって生成される画像フレーム内で見たときに同じ形状を有するマーカー216の画像が得られる。また、図面に示されるように、表面212、214は相互から間隔を空けている。いくつかの実施形態では、表面212、214の間の垂直間隔230は、少なくとも0.5cm、より好ましくは少なくとも1.0cm(例えば、3cm)の値であってもよい。他の実施形態では、間隔230は異なる値を有してもよい。
【0028】
代替実施形態では、表面212、214は平行でなくてもよく、その代わりに相互に対して角度を成してもよい。図3Bは、第1の表面212の第1の法線250と第2の表面214の第2の法線252とが角度254を成す、マーカーブロック202の一変形例を示す。角度254は、0°より大きく45°未満、より好ましくは25°未満の値であってもよい。他の実施形態では、角度254は他の値を有してもよい。図面に示されるように、第1の表面212および第2の表面214は距離230だけ間隔を空けている。
【0029】
いくつかの実施形態では、カメラ204の視線方向262で測定した第1の表面212と第2の表面214との間(したがって、第1の表面212上のマーカー216と第2の表面214上の別のマーカー216との間)の間隔260が、少なくとも0.5cm、より好ましくは少なくとも1.0cm(例えば、3cm)の値であるようにマーカーブロック202に対して、カメラ204が位置付けられる。いくつかの例では、間隔260の値は間隔230の値と同じであってもよい。他の例では、間隔260の値は間隔230の値と異なってもよい。
【0030】
マーカー216が複数の面212、214上にあるマーカーブロック202は、単一の直線状の面上にあるマーカーよりも、マーカーブロック202の回転の変化を、単一のカメラ204によってより容易に検出することができるという理由で有利である。マーカーブロック202のあらゆる回転(カメラ軸の周り以外)について、カメラ204により近い面(例えば、面212)のマーカー216は、カメラ204からより離れた面(例えば、面214)のマーカー216よりも、カメラ204から見てより大きな角度を移動する。したがって、追跡システムは、所与の回転に対してすべてのマーカーがほぼ同じ角度を移動する単一面のマーカーブロックの場合よりも、回転の変化にはるかに敏感であることができる。マーカー216をマーカーブロック202の少なくとも2つの異なる面212、214上に配置することによって、マーカー216自体の法線がほぼ同じ方向を指す(例えば、カメラ204を指す)とともに、依然としてカメラ204からの深度が異なるままであることができる。いくつかの実施形態では、2つの別個のマーカー216が面するそれぞれの方向が30°以上異ならない、より好ましくは15°以上異ならないとき、2つのマーカー216がほぼ同じ方向に面していると見なされる。
【0031】
さらに、マーカー216が複数の面212、214上にあるマーカーブロック202は、すべてのマーカーが1つの直線状の面上にあるマーカーブロックの場合に存在する特定の曖昧さを回避する。図8は、そのような原理を示す。マーカーブロック202を所与とすると、カメラ204は、カメラ204で見たマーカーの画像901を形成する。画像901を所与とすると、ブロックの向きは2つの異なる形902a、902bに解釈することができることに留意されたい。したがって、利用可能な画像901は、マーカーブロック202の位置の曖昧さをもたらす。複数面のマーカーブロック202は、画像の2つの面の間の関係が構造210の向きに応じて異なるので、この曖昧さを回避する。したがって、図8の例に示される曖昧さが回避される。
【0032】
図4Aおよび4Bは、カメラ408の一実施形態を示す。カメラ408は、図1に示されるカメラ204の一例であってもよい。カメラ408は、1つまたは複数の光電陰極と1つまたは複数のCCD素子とを有する電荷結合素子(「CCD」)カメラである。CCD素子は、局部に電荷を蓄え、適切な制御信号に対してその電荷を読出しポイントに伝達することができる半導体素子である。画像化すべき光子が光電陰極に集中すると、カメラが受け取った光強度に比例して電子が発散される。電子は、CCD素子内に位置する電荷バケット内に捕捉される。電荷バケット内の捕捉電子の分布は、カメラが受け取った画像を現す。CCDは、これらの電子をアナログデジタル変換器に伝達する。アナログデジタル変換器の出力は、ビデオ画像を処理し、再帰反射マーカー406の位置を計算するため、コンピュータ410に送信される。いくつかの実施形態によれば、カメラ408は、RS-170出力と640×480ピクセルの解像度とを有する白黒CCDカメラである。あるいは、カメラ408は、CCIR出力と756×567ピクセルの解像度とを有するCCDカメラを含むことができる。
【0033】
図示される実施形態では、赤外線照明器602(「IR照明器」)がカメラ408と同じ位置に配置される。IR照明器602は、カメラ408と同じ方向に向いた1つまたは複数の赤外光ビームを発生させる。IR照明器602は、カメラ本体608のレンズ606の周囲でリング状にされた表面を含む。IR照明器602の表面は、赤外光を発生させる複数の個々のLED素子604を含む。LED素子604は、IR照明器602上に螺旋パターンで配置される。他の実施形態では、LED素子604は他のパターンで配置されてもよい。カメラ408の一部であってもよい赤外フィルタは、赤外光に対するカメラの感度を上げるために除去されるか、または使用不能にされる。
【0034】
動作の際、1つまたは複数の照明源(好ましい実施形態では、赤外光源)は、患者支持体14上の患者16に光を投射する。生成された光はマーカー216から反射され、それによってこれらマーカー216の位置を示す。患者16に向けられたカメラ204は、マーカー216からの反射光を捕捉し検出する。カメラ204は、そのビデオフレーム内のマーカー216の位置を示すビデオ画像を生成する。生成されたビデオ画像は、さらなる処理のためにプロセッサ54(または別のプロセッサ)に送信される。
【0035】
プロセッサ54(または別のプロセッサ)は、カメラ204からビデオ画像を受け取る。プロセッサ54は、まず、カメラ204からの各ビデオ画像を処理して、画像フレーム内のマーカー216の画像を識別する。次に、決定したマーカー216の位置と、マーカー216中の既知の相対位置とに基づいて、プロセッサ54は、マーカーブロック202の位置(X,Y,Z)および/または向き(θX,θY,θZ)を決定する。いくつかの実施形態では、マーカーブロック202の位置および/または向きの演算を容易にするため、カメラ204の位置および向きに関する情報がプロセッサ54に与えられる。
【0036】
マーカー216がビデオフレームのいかなる場所にも現れることがあり、マーカー216の位置を決定するには、ビデオフレームの画像要素をすべて検査しなければならないことがあるという点で、マーカー216の追跡は非効率的である可能性がある。したがって、一実施形態では、マーカー216の位置の最初の決定には、ビデオフレーム内の画像要素をすべて検査することを伴う。ビデオフレームが640×480の画像要素を含む場合、307200(640×480)の画像要素をすべて最初に検査して、マーカー216の位置が求められる。
【0037】
マーカー216のリアルタイム追跡の場合、ビデオフレームごとにすべての画像要素を検査して、リアルタイムでマーカー216の位置を決定するには、相当量のシステム資源を消費する場合がある。したがって、一実施形態では、マーカー216のリアルタイム追跡は、本明細書では「トラッキングゲート(tracking gate)」と呼ばれる、ビデオフレーム内の既に識別されたマーカー216の位置の推定に基づいて設置される、ビデオフレームの小さい領域を処理することによって容易にすることができる。マーカー216の既に決定された位置を使用して、その同じマーカーについて最初の探索範囲(すなわち、トラッキングゲート)が定義される。トラッキングゲートは、マーカー216の以前の位置を中心とした、ビデオフレームの比較的小さい部分である。トラッキングゲートは、マーカー216の新しい位置を含まない場合にのみ拡張される。一例として、特定のマーカーの既に決定された位置がビデオフレーム内の画像要素(50,50)であるときの状況について考慮する。トラッキングゲートがビデオフレームの50×50の範囲に限定されている場合、この例のトラッキングゲートは、座標(25,50)、(75,50)、(50,25)、および(50,75)によって定義される範囲内に拘束される画像要素を含む。マーカー216がこのトラッキングゲート内で見つからない場合のみ、ビデオフレームの他の部分が探索される。
【0038】
いくつかの実施形態では、次に、マーカーブロック202の決定された位置および/または向きを使用して、患者16を所望の位置および/向きで位置付けることができる。例えば、マーカーブロック202の決定された位置は、マーカーブロック202の所定位置と比較されてもよい。そのような場合、マーカーブロック202の決定された位置が所定位置と一致する場合、患者16は正確に位置付けられていると見なされる。他方では、マーカーブロック202の決定された位置が所定位置と一致しない場合、患者16は、マーカーブロック202の位置が所定位置と一致するまで位置付けられる(例えば、患者支持体14を移動させることによって)。
【0039】
他の実施形態では、マーカーブロック202の決定された位置および/または向きを使用して、患者16の少なくとも一部分の位置を決定することができる。そのような場合、マーカーブロック202と患者16との相対的な空間的関係は分かっているか、または予め定められる。そのため、マーカーブロック202位置が決定されれば、マーカーブロック202と患者16との相対的な空間的関係に基づいて、患者16のその部分の位置を決定することができる(例えば、プロセッサ54によって)。いくつかの実施形態では、患者16の部分の位置をリアルタイムで継続的に決定することによって、患者16の部分をリアルタイムで追跡することができる。患者16の追跡された位置は、システム10によって提供される放射の適用をゲート制御するのに使用されてもよい。さらなる実施形態では、患者16の追跡された位置は、強度変調放射線治療(IMRT)を行いながら、標的部位の追跡を行うのに使用されてもよい。IMRTでは、治療セッション中、標的部位の第1の部分が標的部位の第2の部分よりも多くの放射を受けるようにして、多分割コリメータ(multi-leaf collimator)が操作される。
【0040】
さらなる実施形態では、マーカーブロック202の決定された位置を使用して、患者16が行った活動のレベルを決定することができる。例えば、マーカーブロック202が患者の胸部上に設置された場合、マーカーブロック202の決定された位置を使用して、患者16が行った呼吸のレベルを決定することができる。場合によっては、ある期間にわたるマーカーブロック202の複数の位置を決定することによって、プロセッサ54は、その期間内の様々な時点における患者の呼吸レベルに対応する複数の振幅ポイントを得るように構成することができる。決定された振幅ポイントを使用して、治療のための患者16に対する治療放射線の適用をゲート制御する、または画像化目的での患者16に対するイメージング放射の適用をゲート制御するなど、処置の実行をゲート制御してもよい。他の実施形態では、マーカーブロック202(もしくは振幅ポイント)の決定された位置を使用して、リアルタイムで、または画像データが得られた後に、画像データのビニング(binning)をゲート制御してもよい。さらなる実施形態では、振幅ポイントを使用して、IMRTを行いながら、標的部位の追跡を行ってもよい。
【0041】
さらなる実施形態では、ある期間にわたるマーカーブロック202の複数の位置を決定することによって、プロセッサ54は、様々な時点における呼吸周期の異なる完全性のレベルに対応する複数の位相点を得るように構成することができる。例えば、位相値は0°〜360°の値(0°は呼吸周期の開始を表し、360°は呼吸周期の終了を表す)を有してもよい。決定された位相値を使用して、治療のための患者16に対する治療放射線の適用をゲート制御する、または画像化目的での患者16に対するイメージング放射の適用をゲート制御するなど、処置の実行をゲート制御してもよい。他の実施形態では、決定された位相値を使用して、リアルタイムで、または画像データが得られた後に、画像データのビニングをゲート制御してもよい。さらなる実施形態では、位相値を使用して、IMRTを行いながら、標的部位の追跡を行ってもよい。
【0042】
マーカーブロック202を使用することの1つの利点は、マーカーブロック202上での基準位置216の相対位置が演繹的に分かっていれば、単一のカメラ視野からマーカーブロック202の6つの自由度(X、Y、Z、θX、θY、θZ)をすべて決定するのが可能であることである。換言すれば、マーカーブロック202の絶対座標を導き出すのに単一のカメラのみがあればよい。これは、マーカーブロック202上のマーカー216間の相対的な位置付けが分かっており、カメラ204の絶対座標および視線の向きも分かっているためである。カメラ204が検出したマーカーブロック202の画像は、カメラの視線の向きに対する可視の基準位置216の位置付けを示す。マーカー216間の実際の相対位置が分かっているので、カメラ画像から検出されたマーカー216の相対座標を使用して、マーカーブロック202の絶対座標を導き出すことができる。マーカーブロック202はまた、その構成によって、カメラ204がマーカー216を正確に検出できるという理由で有利である。
【0043】
マーカーシステム200は1つのカメラ204を有するものとして記載してきたが、他の実施形態では、マーカーシステム200は2つ以上のカメラを有することができる。例えば、代替実施形態では、マーカーシステム200はマーカー216を検出する2つのカメラを含んでもよい。そのような場合、プロセッサ54は、2つのカメラから画像データを受け取り、当該分野において知られているような三角測量技術を使用して、マーカーブロック202の位置を決定する。また、他の実施形態では、カメラの代わりに、マーカーシステム200は、マーカー216を検出することができる他のタイプの光学装置を含んでもよい。
【0044】
他の実施形態では、上述の実施例に示される形状の代わりに、マーカーブロック202は異なる形状を有することができる。図5は、その表面上に位置するマーカー216で構成される複数の基準位置を備えた円形形状を有するマーカーブロック202の一実施形態を示す。図6は、その表面に付着させた複数のマーカー216で構成される半球形状を有する代替のマーカーブロック202を示す。
【0045】
図7は、他の実施形態によるマーカーブロック202の変形例を示す。図示される実施形態では、マーカーブロック202は表面212を有し、マーカー216a、216bは表面212上に位置する。マーカー216aは法線300aを有し、マーカー216bは法線300bを有する。いくつかの実施形態では、各法線300は、マーカー216をそこから見ることが意図される方向を指すベクトルである。あるいは、各法線300は、マーカー216の照射領域がその上で最大限になる方向を指すベクトルとして定義されてもよい。図面に示されるように、法線300a、300bは相互に平行である。あるいは、法線300a、300bは、45°未満、より好ましくは25°未満の角度を成してもよい。
【0046】
図示される実施形態では、マーカー216bは、マーカー216aと交差し、法線300aに垂直な面302から距離230で間隔が空けられる。そのような構成では、マーカー216a、216bは相互から間隔が空けられる。いくつかの実施形態では、距離230は、少なくとも0.5cm、より好ましくは少なくとも1.0cmである。やはり図面に示されるように、表面212は基部220と角度222を成す。いくつかの実施形態では、マーカー216a、216bがほぼカメラ204に向けられるようにして、角度222が選択される。他の実施形態では、角度222はカメラ204の位置を考慮せずに予め定められてもよい。そのような場合、マーカーブロック202を使用するとき、マーカー216a、216bがほぼカメラ204に面するようにしてカメラ204が位置付けられる。いくつかの実施形態では、カメラ204の視線方向で測定したマーカー216a、216bの間の距離が少なくとも0.5cm、より好ましくは少なくとも1.0cmであるようにして、カメラ204がマーカーブロック202に対して位置付けられる。
【0047】
他の実施形態では、マーカーブロック202は特定の身体部分に適合する形状で形成することができる。例えば、身体上の特定位置に一致する型またはキャストをマーカーブロック202として用いることができる。身体の特定領域に適合するように形作られたマーカーブロック202によって、患者の特定位置におけるマーカーブロック202の反復可能な配置が容易になる。あるいは、マーカーブロック202は、患者の身体に付着させた特定の固定具に適合するように形成することができる。例えば、マーカーブロック202は、それを眼鏡に付着させることを可能にするくぼみおよび溝の中に形成することができる。さらに別の実施形態では、マーカー216をその上に有するマーカーブロック(1つまたは複数)202と一体で形成される。
【0048】
上述の実施形態では、マーカー216は患者16の外部にある。しかし、代替実施形態では、マーカー216は患者16の体内に位置してもよい。そのような場合、マーカーブロック202は、患者16の体内の標的部位に位置させることができるようにサイズ決めされる。マーカー216は、マーカー216を検出するのに用いられている画像化技術に適した材料から作ることができる。マーカー216の検出は、超音波画像診断、CT画像診断、X線透視、およびPET画像診断など、当該技術において知られている画像化技術のいずれかを使用して達成することができる。
【0049】
さらなる実施形態では、ヒト以外の対象である構造210の代わりに、構造210は患者16の一部分であってもよい。そのような場合、第1の表面212は患者16の第1の部分であり、第2の表面214は患者16の第2の部分であり、マーカー216は、患者16の部分に固定されるか、またはその上に位置する。例えば、インクマーキングが、マーカー216として機能するように患者16上に位置してもよい。
【0050】
さらなる実施形態では、マーカー216は患者16の部分であってもよい。例えば、患者16上の目印がマーカー216として使用されてもよい。
【0051】
また、異なる実施形態ではマーカーシステム200を異なるシステムとともに使用できることが、当業者には理解されるはずである。例えば、放射システム10は、必ずしも治療装置でなくてもよく、放射線ビームを生成することができるいかなる機械であってもよい。いくつかの実施形態では、放射システム10は、CT画像診断装置(例えば、コーンビームCT装置)、断層撮影装置、MRI装置、Cアームに基づくX線画像診断装置、三次元血管撮影装置、もしくはPET装置など、いかなるタイプの画像化装置または光学装置であってもよい。さらに、他の実施形態では、本明細書に記載するマーカーシステム200および/または方法のいずれかを、位置決め装置もしくは画像化能力を有さない治療装置など、画像化以外の装置とともに使用することができる。さらなる実施形態では、本明細書に記載するマーカーシステム200および/または方法のいずれかを、複数の放射線源を有する装置とともに使用することができる。例えば、装置は、診断放射線(例えば、キロ電子ボルト範囲のエネルギーレベルを有する放射線)を送達するための第1の放射線源と、治療放射線(例えば、メガ電子ボルト範囲のエネルギーレベルを有する放射線)を送達するための第2の放射線源とを有することができる。別の実施例として、装置は、複数の診断用放射線源および/または1つもしくは複数の治療放射線源を有することもできる。
【0052】
コンピュータシステムアーキテクチャ
図9は、本明細書に記載する様々な実施形態を実施するのに使用することができる、コンピュータシステム1600の一実施形態を示すブロック図である。コンピュータシステム1600は、情報を通信するためのバス1602または他の通信機構と、バス1602と連結された、情報を処理するためのプロセッサ1604とを含む。プロセッサ1604は、図1のプロセッサ54の一例であってもよく、または本明細書に記載するあらゆるプロセッサの一例であってもよい。コンピュータシステム1600はまた、バス1602に連結された、情報およびプロセッサ1604によって実行される命令を格納するための、ランダムアクセスメモリ(RAM)または他の動的記憶装置などの主メモリ1606を含む。主メモリ1606はまた、プロセッサ1604によって実行される命令の実行中に一時変数または他の中間情報を格納するのに使用されてもよい。コンピュータシステム1600はさらに、バス1602に連結された、静的情報およびプロセッサ1604用の命令を格納するための読出し専用メモリ(ROM)1608または他の静的記憶装置を含む。情報および命令を格納するための、磁気ディスクまたは光ディスクなどのデータ記憶装置1610が設けられ、バス1602に連結される。
【0053】
コンピュータシステム1600は、バス1602を介して、ユーザに対して情報を表示するための陰極線管(CRT)などの表示装置167に連結されてもよい。情報およびコマンド選択をプロセッサ1604に通信するための、英数字キーおよび他のキーを含む入力装置1614がバス1602に連結される。別のタイプのユーザ入力装置は、方向情報およびコマンド選択をプロセッサ1604に通信するための、ならびに表示装置167上におけるカーソルの動きを制御するための、マウス、トラックボール、またはカーソル方向キーなどのカーソル制御部1616である。この入力装置は、一般的に、装置が面内における位置を指定できるようにする、第1の軸線(例えば、x)と第2の軸線(例えば、y)との2つの軸線での2つの自由度を有する。
【0054】
いくつかの実施形態では、コンピュータシステム1600を使用して、本明細書に記載する様々な機能を行うことができる。いくつかの実施形態によれば、そのような使用は、主メモリ1606に含まれる1つまたは複数の命令の1つまたは複数のシーケンスをプロセッサ1604が実行するのに応答して、コンピュータシステム1600によってもたらされる。当業者であれば、本明細書に記載する機能および方法に基づいて、そのような命令をどのように準備するかが分かるであろう。そのような命令は、記憶装置1610などの別のコンピュータ可読媒体から主メモリ1606に読み込まれてもよい。主メモリ1606に含まれる命令のシーケンスを実行することによって、プロセッサ1604が、本明細書に記載するプロセス工程を実行する。また、多重処理装置の1つまたは複数のプロセッサを用いて、主メモリ1606に含まれる命令のシーケンスを実行してもよい。代替実施形態では、ソフトウェア命令の代わりに、またはそれらと組み合わせて固定配線回路構成を使用して、本明細書に記載する様々な実施形態を実現してもよい。したがって、実施形態は、ハードウェア回路構成およびソフトウェアのいかなる特定の組合せにも限定されない。
【0055】
本明細書で使用する用語「コンピュータ可読媒体」は、プロセッサ1604に実行用の命令を供給するのに関与するあらゆる媒体を指す。そのような媒体は、不揮発性媒体、揮発性媒体、および伝送媒体を含むがそれらに限定されない多くの形態を成してもよい。不揮発性媒体としては、例えば、記憶装置1610などの光学ディスクまたは磁気ディスクが挙げられる。揮発性媒体としては、主メモリ1606などの動的記憶装置が挙げられる。送信媒体としては、バス1602を含むワイヤを含む、同軸ケーブル、銅線、および光ファイバが挙げられる。送信媒体はまた、電波および赤外線データの通信中に生成されるものなど、音波または光波の形態を成すことができる。
【0056】
コンピュータ可読媒体の一般的な形態としては、例えば、フロッピー(登録商標)ディスク、フレキシブルディスク、ハードディスク、磁気テープ、または他のあらゆる磁気媒体、CD-ROM、他のあらゆる光学媒体、パンチカード、紙テープ、穴のパターンを備えた他の物理的媒体、RAM、PROM、EPROM、FLASH-EPROM、他のあらゆるメモリチップもしくはカートリッジ、後述するような搬送波、あるいはコンピュータが読み取ることができる他のあらゆる媒体が挙げられる。
【0057】
様々な形態のコンピュータ可読媒体は、実行のために1つまたは複数の命令の1つまたは複数のシーケンスをプロセッサ1604に伝達することに関係してもよい。例えば、命令は、最初に、遠隔コンピュータの磁気ディスク上にあってもよい。遠隔コンピュータは、その動的記憶装置に命令をロードし、モデムを使用して電話回線を通じて命令を送信することができる。コンピュータシステム1600に近いモデムは、電話回線上のデータを受信し、赤外線送信機を使用して、データを赤外線信号に変換することができる。バス1602に連結された赤外線検出器は、赤外線信号の形で伝達されたデータを受信し、データをバス1602上に位置させることができる。バス1602は、データを主メモリ1606に伝達し、そこからプロセッサ1604が命令を検索し実行する。主メモリ1606が受信した命令は、任意に、プロセッサ1604による実行前または実行後のどちらかで、記憶装置1610に格納されてもよい。
【0058】
コンピュータシステム1600はまた、バス1602に連結された通信インターフェース1618を含む。通信インターフェース1618は、ローカルネットワーク1622に接続されたネットワークリンク1620に対して双方向データ通信カップリングを提供する。例えば、通信インターフェース1618は、対応するタイプの電話回線に対してデータ通信接続を提供する、総合サービスデジタル網(ISDN)カードまたはモデムであってもよい。別の例として、通信インターフェース1618は、互換性をもつLANに対してデータ通信接続を提供する、ローカルエリアネットワーク(LAN)カードであってもよい。無線リンクも実装されてもよい。任意のそのような実装において、通信インターフェース1618は、様々なタイプの情報を表すデータストリームを伝達する、電気信号、電磁信号、または光学信号を送受信する。
【0059】
ネットワークリンク1620は、一般的に、他の装置に対して1つまたは複数のネットワークを通してデータ通信を提供する。例えば、ネットワークリンク1620は、ホストコンピュータ1624に対する、または放射線ビーム源もしくは放射線ビーム源に動作可能に連結されたスイッチなどの機器1626に対して、ローカルネットワーク1622を通して接続を提供してもよい。ネットワークリンク1620を通じて転送されるデータストリームは、電気信号、電磁信号、または光学信号を含むことができる。様々なネットワークを通る信号、ならびにネットワークリンク1620上の、かつコンピュータシステム1600とデータのやり取りをする通信インターフェース1618を通る信号は、情報を転送する搬送波の代表的形態である。コンピュータシステム1600は、ネットワーク(1つまたは複数)、ネットワークリンク1620、および通信インターフェース1618を通して、メッセージを送信し、プログラムコードを含むデータを受信することができる。
【0060】
特定の実施形態を図示し記載してきたが、それらは本発明を限定するものではないことが理解されるであろう。また、本発明の趣旨および範囲から逸脱することなく、様々な変更および修正を行ってもよいことが当業者には明白となるであろう。例えば、本明細書で使用されるとき、用語「画像」は、回路構成またはコンピュータ可読媒体に格納されてもよい画像データを含み、視覚的に表示される画像データに限定されるべきではない。したがって、明細書および図面は、限定的な意味ではなく例証的な意味で考慮されるべきである。本発明は、請求項によって規定される本発明の趣旨および範囲に含まれてもよい、代替例、修正例、および等価物を包含するものとする。
【符号の説明】
【0061】
60a,60b,60c,60d レーザー
62a,62b,62c,62d レーザービーム
202 マーカーブロック
210 構造
212 第1の表面
214 第2の表面
216a,216b,216c,216d マーカー
218 マーキング
【特許請求の範囲】
【請求項1】
第1の表面および第2の表面を有する構造と、
前記第1の表面上に位置する第1のマーカーと、
前記第2の表面上に位置する第2のマーカーとを備え、
前記第1のマーカーおよび前記第2のマーカーが、ほぼ同じ方向に面するように、かつ光学装置によって同時に見ることができるように配置され、
前記第1および第2のマーカーを前記光学装置によって同時に見たとき、前記第1のマーカーと前記光学装置との間の第1の距離が、前記第2のマーカーと前記光学装置との間の第2の距離とは異なる、マーカーシステム。
【請求項2】
前記第1の表面および前記第2の表面が平行である、請求項1に記載のシステム。
【請求項3】
前記第1のマーカーが第1の方向に面し、前記第2のマーカーが第2の方向に面し、前記第1および第2の方向が15°以上変わらない、請求項1に記載のシステム。
【請求項4】
前記第1の表面上の第3のマーカーと、前記第2の表面上の第4のマーカーとをさらに備える、請求項1に記載のシステム。
【請求項5】
前記第1の表面上の第3のマーカーと、前記第1の表面上の第4のマーカーとをさらに備える、請求項1に記載のシステム。
【請求項6】
前記第1の表面および前記第2の表面が少なくとも0.5cmの値を有する距離だけ離れている、請求項1に記載のシステム。
【請求項7】
前記構造の向きを示す前記構造上のマーキングをさらに備える、請求項1に記載のシステム。
【請求項8】
前記第1および第2のマーカーを見るための前記光学装置をさらに備える、請求項1に記載のシステム。
【請求項9】
前記光学装置に連結されたプロセッサをさらに備える、請求項8に記載のシステム。
【請求項10】
前記プロセッサが前記第1のマーカーと前記第2のマーカーとの間の間隔に関するデータを含み、前記間隔が前記光学装置の視線方向で測定される、請求項9に記載のシステム。
【請求項11】
前記第1のマーカーと前記第2のマーカーとの間の相対的間隔に少なくとも部分的に基づいて前記構造の位置を決定するように前記プロセッサが構成される、請求項9に記載のシステム。
【請求項12】
前記第1のマーカーと前記第2のマーカーとの間の相対的間隔に少なくとも部分的に基づいて前記構造の向きを決定するように前記プロセッサが構成される、請求項9に記載のシステム。
【請求項13】
前記構造の位置を追跡するように前記プロセッサが構成される、請求項9に記載のシステム。
【請求項14】
前記カメラの視線方向で測定される前記第1および第2のマーカーの間の距離が少なくとも0.5cmである、請求項8に記載のシステム。
【請求項15】
前記第1の表面が平面領域を有し、前記平面領域が前記第1のマーカーによってカバーされる面積よりも大きい面積を有する、請求項1に記載のシステム。
【請求項16】
基部と、第1の表面と、第2の表面とを有し、前記第1の表面が前記基部と角度を成し、前記角度が30°から90°の値である構造と、
前記第1の表面上に位置する第1のマーカーと、
前記第2の表面上に位置する第2のマーカーとを備え、
前記第1の表面が平面領域を有し、前記平面領域が前記第1のマーカーによってカバーされる面積よりも大きい面積を有する、マーカーシステム。
【請求項17】
前記第1の表面および前記第2の表面が平行である、請求項16に記載のシステム。
【請求項18】
前記第1の表面および前記第2の表面が45°未満の角度を成す、請求項16に記載のシステム。
【請求項19】
前記第1の表面上の第3のマーカーと、前記第2の表面上の第4のマーカーとをさらに備える、請求項16に記載のシステム。
【請求項20】
前記第1の表面上の第3のマーカーと、前記第1の表面上の第4のマーカーとをさらに備える、請求項16に記載のシステム。
【請求項21】
前記第1の表面および前記第2の表面が少なくとも0.5cmの値を有する距離だけ離れている、請求項16に記載のシステム。
【請求項22】
前記構造の向きを示す前記構造上のマーキングをさらに備える、請求項16に記載のシステム。
【請求項23】
前記第1および第2のマーカーを見るためのカメラをさらに備える、請求項16に記載のシステム。
【請求項24】
前記カメラに連結されたプロセッサをさらに備える、請求項23に記載のシステム。
【請求項25】
前記プロセッサが前記第1のマーカーと前記第2のマーカーとの間の間隔に関するデータを含み、前記間隔が前記カメラの視線方向で測定される、請求項24に記載のシステム。
【請求項26】
前記第1のマーカーと前記第2のマーカーとの間の相対的間隔に少なくとも部分的に基づいて前記構造の位置を決定するように前記プロセッサが構成される、請求項24に記載のシステム。
【請求項27】
前記第1のマーカーと前記第2のマーカーとの間の相対的間隔に少なくとも部分的に基づいて前記構造の向きを決定するように前記プロセッサが構成される、請求項24に記載のシステム。
【請求項28】
前記構造の位置を追跡するように前記プロセッサが構成される、請求項24に記載のシステム。
【請求項29】
前記カメラの視線方向で測定される前記第1および第2のマーカーの間の距離が少なくとも0.5cmである、請求項23に記載のシステム。
【請求項30】
第1の法線を有する第1のマーカーと、
第2の法線を有する第2のマーカーとを備え、
前記第1の法線および前記第2の法線が15°未満の角度を成し、前記第2のマーカーが、前記第1の法線に垂直であって前記第1のマーカーと交差する面から間隔を空けられた、マーカーシステム。
【請求項31】
前記第1のマーカーおよび前記第2のマーカーが光学装置によって同時に見ることができるように配置される、請求項30に記載のシステム。
【請求項32】
第1の表面および第2の表面を有する構造と、前記第1の表面上に位置する前記第1のマーカーと、前記第2の表面上に位置する前記第2のマーカーとをさらに備え、前記第1の表面が前記第2の表面から間隔を空けられた、請求項30に記載のシステム。
【請求項33】
表面を有する構造をさらに備え、前記第1のマーカーおよび前記第2のマーカーが前記表面上に位置する、請求項30に記載のシステム。
【請求項34】
前記第1のマーカーおよび前記第2のマーカーが少なくとも0.5cmの値を有する距離だけ離れており、前記距離が前記第1の法線または前記第2の法線の方向で測定される、請求項30に記載のシステム。
【請求項35】
カメラの視線方向で測定される前記第1および第2のマーカーの間の距離が少なくとも0.5cmである、請求項30に記載のシステム。
【請求項36】
光学装置を有するマーカーシステムを使用する方法であって、
第1のマーカーを第1の位置に設置するステップと、
第2のマーカーを第2の位置に設置するステップとを含み、
前記光学装置の視線方向で測定した前記第1のマーカーと前記第2のマーカーとの間の距離が少なくとも0.5cmであるようにして、前記第1のマーカーおよび前記第2のマーカーが設置される、方法。
【請求項37】
前記第1および第2のマーカーがマーカーブロックに連結され、前記設置するステップが前記マーカーブロックを位置付けるステップを含む、請求項36に記載の方法。
【請求項38】
前記距離を使用して前記マーカーブロックの位置を決定するステップをさらに含む、請求項37に記載の方法。
【請求項39】
前記第1および第2の位置が患者の体内に位置する、請求項36に記載の方法。
【請求項40】
前記光学装置を使用して前記第1および第2のマーカーを検出するステップをさらに含む、請求項36に記載の方法。
【請求項41】
前記光学装置が、カメラ、CT装置、X線透視装置、PET装置、および超音波装置から成る群から選択される、請求項40に記載の方法。
【請求項42】
前記第1のマーカーを前記第1の位置に配置する前記ステップが、患者に印を付けるステップを含む、請求項36に記載の方法。
【請求項43】
前記第1のマーカーが前記患者の一部分を含み、前記第1のマーカーを前記第1の位置に配置する前記ステップが、前記患者の前記部分を位置付けるステップを含む、請求項36に記載の方法。
【請求項1】
第1の表面および第2の表面を有する構造と、
前記第1の表面上に位置する第1のマーカーと、
前記第2の表面上に位置する第2のマーカーとを備え、
前記第1のマーカーおよび前記第2のマーカーが、ほぼ同じ方向に面するように、かつ光学装置によって同時に見ることができるように配置され、
前記第1および第2のマーカーを前記光学装置によって同時に見たとき、前記第1のマーカーと前記光学装置との間の第1の距離が、前記第2のマーカーと前記光学装置との間の第2の距離とは異なる、マーカーシステム。
【請求項2】
前記第1の表面および前記第2の表面が平行である、請求項1に記載のシステム。
【請求項3】
前記第1のマーカーが第1の方向に面し、前記第2のマーカーが第2の方向に面し、前記第1および第2の方向が15°以上変わらない、請求項1に記載のシステム。
【請求項4】
前記第1の表面上の第3のマーカーと、前記第2の表面上の第4のマーカーとをさらに備える、請求項1に記載のシステム。
【請求項5】
前記第1の表面上の第3のマーカーと、前記第1の表面上の第4のマーカーとをさらに備える、請求項1に記載のシステム。
【請求項6】
前記第1の表面および前記第2の表面が少なくとも0.5cmの値を有する距離だけ離れている、請求項1に記載のシステム。
【請求項7】
前記構造の向きを示す前記構造上のマーキングをさらに備える、請求項1に記載のシステム。
【請求項8】
前記第1および第2のマーカーを見るための前記光学装置をさらに備える、請求項1に記載のシステム。
【請求項9】
前記光学装置に連結されたプロセッサをさらに備える、請求項8に記載のシステム。
【請求項10】
前記プロセッサが前記第1のマーカーと前記第2のマーカーとの間の間隔に関するデータを含み、前記間隔が前記光学装置の視線方向で測定される、請求項9に記載のシステム。
【請求項11】
前記第1のマーカーと前記第2のマーカーとの間の相対的間隔に少なくとも部分的に基づいて前記構造の位置を決定するように前記プロセッサが構成される、請求項9に記載のシステム。
【請求項12】
前記第1のマーカーと前記第2のマーカーとの間の相対的間隔に少なくとも部分的に基づいて前記構造の向きを決定するように前記プロセッサが構成される、請求項9に記載のシステム。
【請求項13】
前記構造の位置を追跡するように前記プロセッサが構成される、請求項9に記載のシステム。
【請求項14】
前記カメラの視線方向で測定される前記第1および第2のマーカーの間の距離が少なくとも0.5cmである、請求項8に記載のシステム。
【請求項15】
前記第1の表面が平面領域を有し、前記平面領域が前記第1のマーカーによってカバーされる面積よりも大きい面積を有する、請求項1に記載のシステム。
【請求項16】
基部と、第1の表面と、第2の表面とを有し、前記第1の表面が前記基部と角度を成し、前記角度が30°から90°の値である構造と、
前記第1の表面上に位置する第1のマーカーと、
前記第2の表面上に位置する第2のマーカーとを備え、
前記第1の表面が平面領域を有し、前記平面領域が前記第1のマーカーによってカバーされる面積よりも大きい面積を有する、マーカーシステム。
【請求項17】
前記第1の表面および前記第2の表面が平行である、請求項16に記載のシステム。
【請求項18】
前記第1の表面および前記第2の表面が45°未満の角度を成す、請求項16に記載のシステム。
【請求項19】
前記第1の表面上の第3のマーカーと、前記第2の表面上の第4のマーカーとをさらに備える、請求項16に記載のシステム。
【請求項20】
前記第1の表面上の第3のマーカーと、前記第1の表面上の第4のマーカーとをさらに備える、請求項16に記載のシステム。
【請求項21】
前記第1の表面および前記第2の表面が少なくとも0.5cmの値を有する距離だけ離れている、請求項16に記載のシステム。
【請求項22】
前記構造の向きを示す前記構造上のマーキングをさらに備える、請求項16に記載のシステム。
【請求項23】
前記第1および第2のマーカーを見るためのカメラをさらに備える、請求項16に記載のシステム。
【請求項24】
前記カメラに連結されたプロセッサをさらに備える、請求項23に記載のシステム。
【請求項25】
前記プロセッサが前記第1のマーカーと前記第2のマーカーとの間の間隔に関するデータを含み、前記間隔が前記カメラの視線方向で測定される、請求項24に記載のシステム。
【請求項26】
前記第1のマーカーと前記第2のマーカーとの間の相対的間隔に少なくとも部分的に基づいて前記構造の位置を決定するように前記プロセッサが構成される、請求項24に記載のシステム。
【請求項27】
前記第1のマーカーと前記第2のマーカーとの間の相対的間隔に少なくとも部分的に基づいて前記構造の向きを決定するように前記プロセッサが構成される、請求項24に記載のシステム。
【請求項28】
前記構造の位置を追跡するように前記プロセッサが構成される、請求項24に記載のシステム。
【請求項29】
前記カメラの視線方向で測定される前記第1および第2のマーカーの間の距離が少なくとも0.5cmである、請求項23に記載のシステム。
【請求項30】
第1の法線を有する第1のマーカーと、
第2の法線を有する第2のマーカーとを備え、
前記第1の法線および前記第2の法線が15°未満の角度を成し、前記第2のマーカーが、前記第1の法線に垂直であって前記第1のマーカーと交差する面から間隔を空けられた、マーカーシステム。
【請求項31】
前記第1のマーカーおよび前記第2のマーカーが光学装置によって同時に見ることができるように配置される、請求項30に記載のシステム。
【請求項32】
第1の表面および第2の表面を有する構造と、前記第1の表面上に位置する前記第1のマーカーと、前記第2の表面上に位置する前記第2のマーカーとをさらに備え、前記第1の表面が前記第2の表面から間隔を空けられた、請求項30に記載のシステム。
【請求項33】
表面を有する構造をさらに備え、前記第1のマーカーおよび前記第2のマーカーが前記表面上に位置する、請求項30に記載のシステム。
【請求項34】
前記第1のマーカーおよび前記第2のマーカーが少なくとも0.5cmの値を有する距離だけ離れており、前記距離が前記第1の法線または前記第2の法線の方向で測定される、請求項30に記載のシステム。
【請求項35】
カメラの視線方向で測定される前記第1および第2のマーカーの間の距離が少なくとも0.5cmである、請求項30に記載のシステム。
【請求項36】
光学装置を有するマーカーシステムを使用する方法であって、
第1のマーカーを第1の位置に設置するステップと、
第2のマーカーを第2の位置に設置するステップとを含み、
前記光学装置の視線方向で測定した前記第1のマーカーと前記第2のマーカーとの間の距離が少なくとも0.5cmであるようにして、前記第1のマーカーおよび前記第2のマーカーが設置される、方法。
【請求項37】
前記第1および第2のマーカーがマーカーブロックに連結され、前記設置するステップが前記マーカーブロックを位置付けるステップを含む、請求項36に記載の方法。
【請求項38】
前記距離を使用して前記マーカーブロックの位置を決定するステップをさらに含む、請求項37に記載の方法。
【請求項39】
前記第1および第2の位置が患者の体内に位置する、請求項36に記載の方法。
【請求項40】
前記光学装置を使用して前記第1および第2のマーカーを検出するステップをさらに含む、請求項36に記載の方法。
【請求項41】
前記光学装置が、カメラ、CT装置、X線透視装置、PET装置、および超音波装置から成る群から選択される、請求項40に記載の方法。
【請求項42】
前記第1のマーカーを前記第1の位置に配置する前記ステップが、患者に印を付けるステップを含む、請求項36に記載の方法。
【請求項43】
前記第1のマーカーが前記患者の一部分を含み、前記第1のマーカーを前記第1の位置に配置する前記ステップが、前記患者の前記部分を位置付けるステップを含む、請求項36に記載の方法。
【図1】

【図2】

【図3A】
【図3B】
【図4A】

【図4B】

【図5】

【図6】
【図7】
【図8】

【図9】

【図2】
【図3A】
【図3B】
【図4A】
【図4B】
【図5】
【図6】
【図7】
【図8】
【図9】
【公表番号】特表2010−530253(P2010−530253A)
【公表日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願番号】特願2010−508495(P2010−508495)
【出願日】平成20年5月6日(2008.5.6)
【国際出願番号】PCT/US2008/062727
【国際公開番号】WO2008/144211
【国際公開日】平成20年11月27日(2008.11.27)
【出願人】(500414202)ヴァリアン メディカル システムズ インコーポレイテッド (6)
【Fターム(参考)】
【公表日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願日】平成20年5月6日(2008.5.6)
【国際出願番号】PCT/US2008/062727
【国際公開番号】WO2008/144211
【国際公開日】平成20年11月27日(2008.11.27)
【出願人】(500414202)ヴァリアン メディカル システムズ インコーポレイテッド (6)
【Fターム(参考)】
[ Back to top ]