
Fターム[4C082AJ11]の内容
放射線治療装置 (15,937) | 放射の位置決め・確認・モニタリング (834) | 超音波の使用 (36)
Fターム[4C082AJ11]に分類される特許
1 - 20 / 36
ターゲット位置をリアルタイムでモニタリングする放射線治療システム

【課題】ターゲット位置をリアルタイムでモニタリングする放射線治療システムの提供。
【解決手段】本ターゲット位置をリアルタイムでモニタリングする放射線治療システムは、遠方制御システムを結合してリアルタイム撮影装置を操作しリアルタイムで撮影してターゲット位置をモニタリングし、並びに画像レジストレーションシステムを整合してリアルタイムで撮影した画像を放射線治療計画に用いられる画像と画像レジストレーションし、患者の腫瘍が先に計画されたビームアイビューの範囲にあるか否かを確認する。腫瘍が先に計画されたビームアイビュー範囲にあることが確認された時、治療の正確度が増し治療効果を高められるほか、放射線治療の照射範囲を縮小して放射線治療の安全性を高められる。
(もっと読む)
拡開可能な近接照射装置

【課題】組織内に近接照射を行う拡開可能な装置を提供する。
【解決手段】組織間内へ導入する大きさの近位端32と遠位端34を有し、放射線源を受ける経路を有する複数の細長部材を担持する細長ボディを具える、ターゲット組織領域へ近接照射を送達する装置10。細長部材は、折りたたんだ構造と拡開した構造の間で移動可能である。使用中は、組織を通る管が形成され、細長部材を担持している細長ボディをその管を通してターゲット位置へ、細長部材を折りたたんだ構造で進める。細長部材はターゲット位置において拡開構造に向けられ、例えば、一またはそれ以上の放射線源を経路に沿って導入するなどして、放射線を送達してターゲット位置において組織を治療する。この装置は、細長部材の過剰拡開を防ぐ、及び/又は、細長部材の迅速な折りたたみを容易にする特徴を具えている。
(もっと読む)
放射線治療システム
【課題】臓器の動きに応じて、照射条件を動的に変更するとともに、線量分布を正確に評価し、治療計画に基づいた適切な治療を行うことができる放射線治療システムを得ることを目的とする。
【解決手段】 呼吸位相毎に撮像された複数の3次元画像と、複数の3次元画像のそれぞれに対して生成された治療計画データRTPを保持する4次元治療計画装置11と、治療対象部位の変位を計測する治療対象部位変位計測装置12と、計測した変位データと、複数の3次元画像とに基づいて、呼吸位相を算出する呼吸位相算出装置13と、算出した呼吸位相と治療計画データに基づいて照射装置17を制御する照射制御部15,16と、放射線の線量分布を評価する線量分布評価部20と、を備え、線量分布評価部20は、呼吸位相ごとに当該呼吸位相に対応する治療計画データに基づいて計算した線量分布を重ね合わせ、重ね合わせた線量分布に応じて放射線量を制御する。
(もっと読む)
突出した形状適応的な器官の周辺近接照射治療に関する適用
【課題】患者の形状適応的な突出した器官内の標的体積に対して非侵襲性の近接照射治療を適用するシステムを提供する。
【解決手段】患者の突出した器官内の標的体積に対して非侵襲性の近接照射治療を適用するシステムおよび方法は、標的体積を取り囲む組織よりも高い線量が標的体積に対して送達されるように、増強された線量の発散放射線を、器官の周囲の、またはそれに近接した少なくとも2つの位置から経皮的に、少なくとも2つの方向から突出した器官の標的体積に送達可能であるように、器官に対して位置付けられるようにして構築されたアプリケータを使用する。治療計画、およびイメージ・ガイダンス技術も記載される。
(もっと読む)
放射線源強度測定装置及び放射線源強度測定方法
【課題】患部挿入用の放射線源の強度を効率良く測定することが可能な放射線源強度測定装置及び放射線源強度測定方法を提供する。また、放射線源の取り違えを検出することができる放射線源強度測定装置及び放射線源強度測定方法を提供する。
【解決手段】放射線源の強度を求める放射線源強度測定装置は、微小放射線源挿入装置1の微小放射線源の挿入位置毎に測定パラメータを記憶する記憶部を備えるコンピュータ33と、微小放射線源の挿入時に、微小放射線源挿入装置1のガイド針21中を移動中の微小放射線源からの放射線の強度を測定する放射線センサ31とを備える。コンピュータ33は、挿入位置に基づいて記憶している測定パラメータを特定し、特定した測定パラメータと放射線センサ31により測定された放射線強度とに基づいて、微小放射線源の強度を求める。
(もっと読む)
フィデューシャルを配備するためのシステム及び方法
実施形態は、フィデューシャル配備システム(1000)と、それを使用するための方法と、を含んでいる。フィデューシャル(400)は、本システムの針の1つ又はそれ以上のスロット(806)に係合するように構成されている1つ又はそれ以上の突起(408)を含むことができる。針(800)は、複数のフィデューシャル(400)を標的場所に、一度に1つずつ連続式に送達するように構成することができる。一部の特定の実施形態では、フィデューシャル(400)のエコー源性的設置は特定の利点をもたらす。 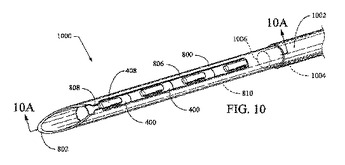 (もっと読む)
(もっと読む)
第1座標系に関係する医療情報をMPSシステムを使用する第2座標系において位置合わせする方法及びシステム
【課題】カテーテル挿入の容易化のため、ある座標系において取得した画像を、他の座標系において取得した画像と位置合わせする新奇の方法を提供する。
【解決手段】身体の第1位置及び方向を検出する第1医療位置決めシステム226と、第2位置及び方向を検出する第2医療位置決めシステム236と、第2イメージャ及び第2医療位置決めシステムに結合される位置合わせモジュール232とを含み、前記第1医療位置決めシステムは第1イメージャ224に関係付けられて身体の第1画像を前記第1位置及び方向と関係付ける。前記第2医療位置決めシステムは、前記第2イメージャ234に関係付けられて第2画像を前記第2位置及び方向と関係付け、前記位置合わせモジュールは、前記第1位置及び方向及び前記第2位置及び方向にしたがって、前記第1画像を前記第2画像に位置合わせする。
(もっと読む)
薬液注入装置、この薬液注入装置を有する透視撮像システム、薬液注入装置のコンピュータプログラムおよびデータ処理方法
【課題】撮像被験者に適正な注入制御データを簡単に設定することができる薬液注入装置を提供する。
【解決手段】薬液注入装置400は、撮像作業ごとに設定される注入制御データに対応して動作制御するシリンジ駆動機構412により薬液注入を実行する。ただし、注入制御データの自動設定要求が入力操作されると、RIS100の撮像オーダデータから被験者管理データを取得し、この被験者管理データで注入制御データを生成設定する。しかし、RIS100から被験者管理データを取得できないときには被験者管理装置910,920から被験者管理データを取得する。従って、撮像オーダデータに被験者管理データが適正に登録されていれば、この被験者管理データで注入制御データを生成し、登録されていなくとも被験者管理装置910,920の被験者管理データで注入制御データを生成する。
(もっと読む)
モデルにより強調される画像化
治療反応シミュレータは、目的物又は対象についての情報に基づいて治療される目的物又は対象の構造体のモデルを生成するモデラ202と、モデル及び治療計画に基づいて構造体が治療に対してどのように反応する見込みであるかを示す予測される反応を生成する予測器204とを含んでいる。他の観点では、システムが、他の患者に対応するパラメータの候補のセットを用いて患者に関する患者の状態を決定するコンピュータでのシミュレーションを実行することと、患者の予測される状態を示す第1の信号を生成することと、患者の既知の状態に基づいてパラメータの候補のセットが患者に適しているかどうかを示す第2の信号を生成することとを含んでいる。 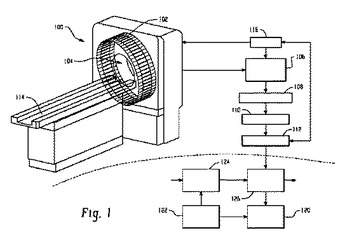 (もっと読む)
(もっと読む)
ジョーとガントリーとカウチの協調動作を利用した放射線療法の画像化及び送達
患者の治療区域に放射線療法治療計画を送達する方法。治療計画は、患者を支持するための可動式支持台と、支持台に対して動かすことができるガントリーとを含む放射線療法システムを使用して送達される。ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している。支持台は、治療区域への治療計画の送達中に動かされ、ジョーの幅は、治療区域への治療計画の送達中に動的に調節される。 (もっと読む)
治療中に呼吸と患者の運動を補償するための装置
【課題】患者の身体内の内部標的領域に関する位置データを周期的に発生する第1検出装置が作動しない時に、外科治療の位置的な正確性と医学的有効性とを改善するための装置提供すること。
【解決手段】患者の身体内の内部標的領域に関する位置データを周期的に発生する第1検出装置と、第1検出装置が作動しないときに、患者の身体の外部移動を示す1つ以上の外部センサに関する位置データを連続的に発生する第2検出装置と、患者の移動を補償するために第1検出装置が作動しないときに、内部標的領域の位置と外部センサの位置との対応関係を創成し、治療すべき内部標的領域の位置を決定するプロセッサとを有し、前記位置は内部標的領域の所定位置に対応する外部マーカの発生位置に基いて決定されることを特徴とする治療中の患者の呼吸および他の移動を補償する装置。
(もっと読む)
放射線療法送達の運動適応最適化のためのシステム及び方法
放射線療法治療の送達を最適化するシステムと方法。システムは、治療送達を、患者の解剖学的及び生理学的変化(例えば、呼吸及び他の動きなど)や機械構成の変化(例えば、ビーム出力係数、カウチ誤差、リーフ誤差など)の様な各種要因を考慮に入れて最適化する。 (もっと読む)
マーカーシステムおよびその使用方法
マーカーシステムは、第1の表面および第2の表面を有する構造と、第1の表面上に位置する第1のマーカーと、第2の表面上に位置する第2のマーカーとを含み、第1のマーカーおよび第2のマーカーは、ほぼ同じ方向に面するように、かつ光学装置で同時に見ることができるように配置され、第1および第2のマーカーを光学装置で同時に見たとき、第1のマーカーと光学装置との間の第1の距離は、第2のマーカーと光学装置との間の第2の距離とは異なる。 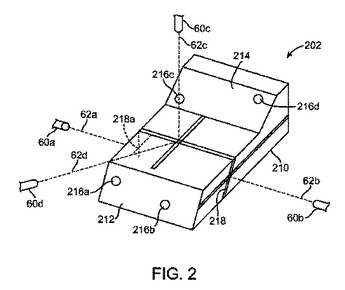 (もっと読む)
(もっと読む)
数量的データ分析の運動補償及び治療
装置は、診断用スキャナ(102)及び処理プランナ(112)を含む。処理プランナ(112)は、対象に付与される処理を計画する。処理装置(114)は、処理計画にしたがって前記対象を処理する。処理スキャナ(108)は、処理セッションの間に前記対象を走査する。運動モデラー(116)は、前記対象の運動をモデル化するように処理走査からの情報を使用する。運動補償された数量的データ生成器(1004)は、前記対象の特徴を示す運動補償された数量的データを生成するように、診断(102)又は他のスキャナ(特徴ジオメトリ(1008)及び特徴運動(1006)情報と同様に)からのデータを使用する。 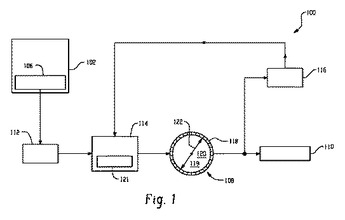 (もっと読む)
(もっと読む)
病変部位の解像および確認のための方法と装置
【課題】放射線治療のプランニングを目的とした病変または器官の解像、位置測定および治療位置の確認のための方法と装置を提供する。
【解決手段】位置感知システムの使用を通じて診断映像システムの座標空間に関する超音波映像の位置測定を確保するために、超音波映像システムと診断映像システムの組合せを使用する。本方法は、位置測定超音波映像内の病変の位置と患者が治療ユニットの処置台に横たわっている間に撮られる超音波映像内の病変の位置を比較し、病変をその対象治療位置に配置するための正しい方策を示唆し、かつ有資格者から得られる確認による補正を実行する。
(もっと読む)
拡開可能な近接照射装置
組織間内へ導入する大きさの近位端と遠位端を有し、放射線源を受ける経路を有する複数の細長部材を担持する細長ボディを具える、ターゲット組織領域へ近接照射を送達する装置。細長部材は、折りたたんだ構造と拡開した構造の間で移動可能である。使用中は、組織を通る管が形成され、細長部材を担持している細長ボディをその管を通してターゲット位置へ、細長部材を折りたたんだ構造で進める。細長部材はターゲット位置において拡開構造に向けられ、例えば、一またはそれ以上の放射線源を経路に沿って導入するなどして、放射線を送達してターゲット位置において組織を治療する。この装置は、細長部材の過剰拡開を防ぐ、及び/又は、細長部材の迅速な折りたたみを容易にする特徴を具えていても良い。 (もっと読む)
柔軟な針の制御された操作
【課題】軟らかい組織への挿入中の柔軟な針を、該針の位置を明らかにする画像を用いて閉ループ操作する、コンピューター制御された新規のロボットシステムと、これを用いる方法とを提供すること。
【解決手段】軟らかい組織への挿入中の柔軟な針を操作するロボットシステムは、前記針の位置を明らかにする画像を用いる。途中で危険な障害物を避けつつ所望の目標位置に到達する、前記針の先端部の軌道を制御装置が計算する。逆運動学のアルゴリズムを用いて、前記先端部を前記軌道に従わせるために前記針の基部に必要とされる動きが計算され、ロボットが、制御された前記針の挿入を行う。柔軟な針の変形可能な組織への挿入は、仮想バネにより支持された線形の梁としてモデル化され、前記仮想バネの弾性係数は前記針に沿って変化する。前記針の順運動学及び逆運動学が解析的に解かれ、リアルタイムの経路計画及び修正が可能となる。X線透視画像において行われる画像処理により前記針の形状が検出される。検出された前記針の形状から前記組織の剛性が計算される。
(もっと読む)
3次元医用画像の描画
3次元医用画像で関心ボリューム構造を描画する方法及び装置。この装置は、3次元画像を格納するためのデータ記憶デバイス、及び3次元画像の関心ボリューム構造を描画するためのディジタル処理デバイスを含む。 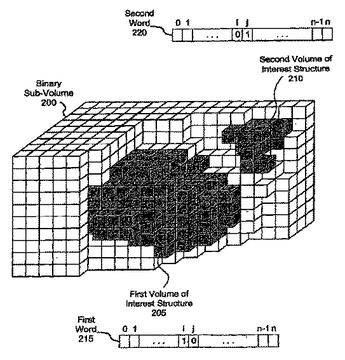 (もっと読む)
(もっと読む)
複数のコリメータの自動選択
複数の治療ノードのそれぞれにおけるビーム・パラメータを自動的に決定するためのシステム及び方法が開示される。ビーム・パラメータは、ビーム形状、ビーム寸法及び/又はビーム配向を含んでよい。また、放射線治療システムにおいて複数のコリメータを自動的に選択するためのシステム及び方法が開示される。 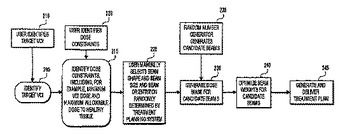 (もっと読む)
(もっと読む)
眼内近接照射療法のための方法および装置
標的組織に放射線を供給するためにカニューレが眼中に導入される、眼内近接照射療法の方法および装置を開示する。標的組織に対してカニューレを適切に位置決めし、非標的組織を保護し、x線放出体によって生成される熱を調節し、治療を組み合わせる技術を開示する。 (もっと読む)
1 - 20 / 36
[ Back to top ]