
署名認証システム
【課題】反射光の検出及び処理を行うことで、ペンの3次元位置に基づく特有情報を取得し、署名の真偽を識別する署名認証装置を提供すること
【解決手段】署名認証装置に用いるペン型入力機器は、反射光の検出を行う検出部200と、検出部200での検出結果に基づいて処理を行う処理部300とを含み、入力機器は、長手方向において反射率の異なる第1の反射部RE1及び長手方向に沿った軸の軸周りでの回転方向において反射率の異なる第2の反射部RE2の少なくとも一方を有し、検出部200は、第1の反射部RE1及び第2の反射部RE2の少なくとも一方からの反射光を検出し、処理部300は、第1の反射部RE1の長手方向での移動量情報及び第2の反射部RE2の回転方向での回転量情報の少なくとも一方を求める。
【解決手段】署名認証装置に用いるペン型入力機器は、反射光の検出を行う検出部200と、検出部200での検出結果に基づいて処理を行う処理部300とを含み、入力機器は、長手方向において反射率の異なる第1の反射部RE1及び長手方向に沿った軸の軸周りでの回転方向において反射率の異なる第2の反射部RE2の少なくとも一方を有し、検出部200は、第1の反射部RE1及び第2の反射部RE2の少なくとも一方からの反射光を検出し、処理部300は、第1の反射部RE1の長手方向での移動量情報及び第2の反射部RE2の回転方向での回転量情報の少なくとも一方を求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、署名等の手書きデータの真偽を識別するための認証システムに関する。
【背景技術】
【0002】
従来から、US特許5123064号(特許文献2)、US特許5448044号(特許文献3)等に開示されているように、各社から多くのシグネチャーパッドと呼ばれる電子署名認証機器が販売されている。これらは、一般に平面上での筆跡データを読み取るものであるが、近年、3次元で筆跡を読み取る技術が提案されてきた。
特許文献1においては詳細な説明が無いものの、上記の署名認証システムでは、3次元位置を検出できるので、例えば、署名時のペンの傾き等も検出することが出来る。即ち、署名する個人の癖も読み取ることが出来るので、3次元検出は平面上の筆跡データのみの署名認証よりも信頼性を高めることが出来ると言える。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−9280号公報
【特許文献2】米国特許第5123064号明細書
【特許文献3】米国特許第5448044号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に示された書名認証システムは、ステレオカメラで取得した画像データを用いる為に、CPUのデータ処理に膨大な容量が必要となる。画像データを取得すると、実際に署名認証に必要なデータ以外の多くのデータ、例えば、背景画像や腕の画像も取得してしまうので、そういった無関係の画像データを排除しなければ、ノイズとなり、かえって信頼性が低下してしまうのである。
そこで、本発明の目的は、カメラ等で撮像画像データを取得する必要なしに、3次元的にペンの動きを読み取る署名認証装置、若しくは、3次元的なペンの動きによって得られる署名者毎の署名者特有情報を読み取る署名認証装置を提供することにある。
【課題を解決するための手段】
【0005】
(1)
本発明の一態様は、署名認証システムであって、手書き用の筆記用具と、前記筆記用具に照射光を出射する照射部と、前記照射光が前記筆記用具により反射する反射光を検出する検出部と、前記検出部での検出結果に基づいて処理を行う処理部と、特定の情報を記憶する記憶部と、前記処理部で処理された情報と前記特定の情報とを照合する照合部と、を含み、前記筆記用具は、前記筆記用具の長手方向において反射率の異なる第1の反射部、及び前記長手方向に沿った軸の軸周りでの回転方向において反射率の異なる第2の反射部の少なくとも一方を有し、前記検出部は、前記第1の反射部及び前記第2の反射部の少なくとも一方からの反射光を検出し、前記処理部は、前記検出部での検出結果に基づいて、前記第1の反射部の前記長手方向での移動量情報及び前記第2の反射部の前記回転方向での回転量情報の少なくとも一方を求めることを特徴とする。
上記構成によれば、筆記用具は第1の反射部及び第2の反射部の少なくとも一方を有し、第1の反射部の長手方向での移動量情報及び第2の反射部の回転方向での回転量情報の少なくとも一方を求めることができる。よって、筆記用具の傾き等の3次元的な動き情報を取得することが可能になる。
【0006】
(2)
また、本発明の一態様では、前記第1の反射部は、前記筆記用具の前記長手方向において徐々に反射率が変化し、前記第2の反射部は、前記長手方向に沿った軸の軸周りでの前記回転方向において徐々に反射率が変化する構成にしても良い。
上記構成によればり、長手方向或いは回転方向において反射率が徐々に変化する筆記用具を使用することができるため、筆記用具の動きを精度良く取得することが可能になる。
【0007】
(3)
また、本発明の一態様では、前記処理部は、前記第1の反射部での反射率の検出結果に基づいて、前記筆記用具の移動軌跡を求める構成にしても良い。
上記構成によれば、署名する人の筆跡を求めることができるため、例えば、筆跡をビットマップデータ等の画像データとして筆跡認証ソフトウェアでの真偽判定が可能になる。
【図面の簡単な説明】
【0008】
【図1】本実施形態の署名認証システムの基本構成を示すブロック図。
【図2】図1のブロック図を更に細分化したブロック図。
【図3】本実施形態で利用可能なペン型入力機器の構成例。
【図4】受光部の構成例。
【図5】図5(A)、図5(B)は受光ユニットの構成例。
【図6】照射部の構成例。
【図7】図7(A)、図7(B)は座標情報検出手法を説明する図。
【図8】図8(A)、図8(B)は発光制御信号の信号波形例。
【図9】照射部の他の構成例。
【図10】本実施形態で用いられる筆記用具の構成例。
【図11】伸縮可能な部材を用いることで筆記用具の例。
【図12】検出エリアを設けることで筆記用具の押し込み量を検出する例。
【図13】ペン型入力機器のブロック図。
【図14】検出部の構成例。
【図15】図15(A)、図15(B)は受光ユニットを3つ設ける例を説明する図。
【図16】図16(A)、図16(B)は3次元座標情報の取得に基づく筆記用具の位置の予測例。
【図17】認証因子の信号波形例。
【発明を実施するための形態】
【0009】
以下、本実施形態について説明する。なお、以下に説明する本実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また本実施形態で説明される構成の全てが、本発明の必須構成要件であるとは限らない。
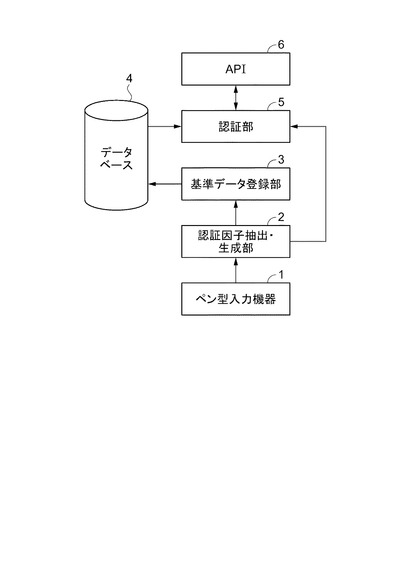
図1は、本発明の一実施形態の署名認証システムの基本構成を示すブロック図である。この署名認証システムは、ペン型入力機器1と、ペン型入力機器1によって得られた情報から筆跡データの認証のための認証因子を抽出し、生成する認証因子抽出・生成部2と、認証因子抽出・生成部2で得られた各個人の筆跡を基準データとして記憶する基準データ登録部3と、各個人毎の複数の基準データを記憶するデータベースと、認証モードにおいては抽出された認証因子とデータベース4の基準データとを照合し、真偽識別の認証を行う認証部5とから構成されている。尚、真偽結果はAPI(アプリケーション・プログラム・インターフェース)6を介して出力される。
ここで、認証因子とは、筆跡であるペン先の動き、ペンの傾き、ペンの速度をXYZ座標から割り出したデータである。
【0010】
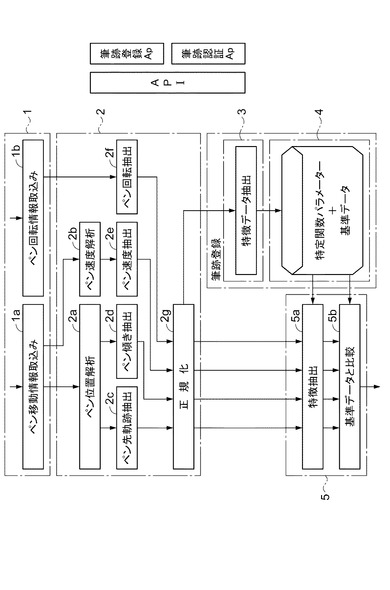
図2は、図1の装置を機能に基づいて細分化したブロック図である。ペン移動情報取込み(1a)により、ペンの3次元的な位置を時系列に取り込む。更に、ペン回転情報取込み(1b)により、ペンがペンの軸を中心に回転する情報を時系列に取り込み。そして、ペン移動情報は、ペン位置解析(2a)を経て、ペン先軌跡抽出(2c)と、ペン傾き抽出(2d)を行う。また、ペン移動情報は、ペン速度解析(2b)を経て、ペン速度抽出(2e)を行う。ペン回転情報により、ペン回転抽出(2f)を行う。ペン先軌跡、ペン傾き、ペン速度、ペン回転は正規化(2g)される。
【0011】
登録モードでは、正規化されたデータから特徴データを抽出(3)する。この特徴データは署名者毎の特有情報であり、すなわち、書名のプロファイルデータと言える。この特徴データには、ペン先の移動軌跡、ペン傾き、ペン速度という複数の認証因子で構成されている。筆跡は各個人の癖により、ペンの持ち方が常時一定でペン傾きが一定の人の場合、ペン傾きを重視して署名の真偽認証をすることが望ましい。また、各個人の癖によりペンを速く動かす人の場合、ペン速度を重視して署名の真偽認証をすることが望ましい。本実施例では、このような重みづけを行うパラメーターとして特徴関数パラメーターを設定する。例えば、署名者に同じ署名を3回書いて正規化したデータを取ると、署名者特有のプロファイルデータが3つ所得できる。これにより、その人の癖を見つけて特徴関数パラメーターを生成する。また、3回のプロファイルデータの平均値を基準データとする。そして、その特徴関数パラメーターと基準データをデータベース4に登録する。
【0012】
認証モードでは、正規化された抽出因子により特徴抽出(5a)を行いプロファイルデータを作成する。認証モードでは署名は通常1回であるので、1回の署名動作からプロファイルデータは作成される。そして、データベース4の基準データと比較(5b)を行うのであるが、書名は必ずしも、常に同じに出来るものではないので、1回の署名のプロファイルデータと基準データを比較すると、本人であっても、本人でないという誤った結論を導く可能性もある。そこで、特徴関数パラメーターによって、差異の許容範囲が設定される。これにより、信頼性の高い署名認証が可能になる。
【0013】
本実施例の署名認証システムでは、ペンの傾きも認証因子として考慮される。右利きの人と左利きの人では、ペンの傾きが全く逆であるので、本実施例の署名認証システムでは、右利きの人と左利きの人を錯誤する可能性は低くなる。これは、2次元署名認証システムには出来ない特徴であり、本実施例の署名認証システムの大きな利点になる。
【0014】
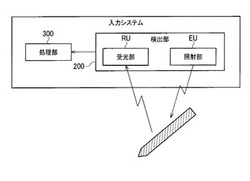
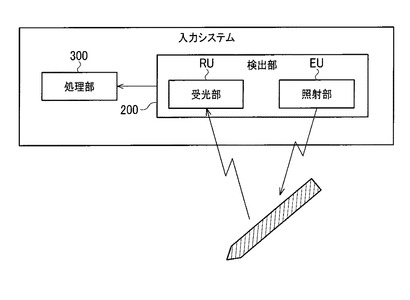
図3に、本実施形態に係るペン型入力機器1に利用可能な光学式位置検出装置100の基本的な構成例を示す。図3の光学式位置検出装置100は、検出部200、処理部300を含み、検出部200は照射部EU及び受光部RUを含む。
なお、ペン型入力機器1は、上述したように検出部200や処理部300を含む光学式位置検出装置100を用いて実現される形態には限定されない。情報処理装置(例えばPC等)により、検出部200や処理部300の機能が実現され、照射部EU及び受光部RUと、上記情報処理装置とが連動して動作する構成でもよい。
【0015】
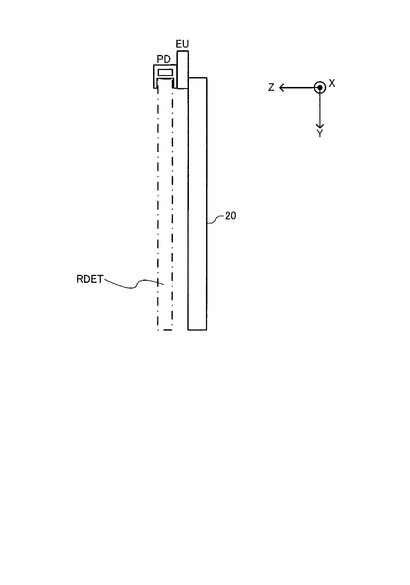
検出部200は、照射光LTが筆記用具OB(ペン)により反射することによる反射光LRの受光結果に基づいて、筆記用具OBの情報(例えば、座標情報や反射率情報)を検出する。具体的には例えば、検出部200は、筆記用具OBが検出されるエリアである検出エリアRDETがX−Y平面に沿ったエリアである場合に、少なくとも検出エリアRDETに存在する筆記用具OBのX座標情報及びY座標情報を検出する。なお、検出部200による座標情報の検出手法については、後述する。また、具体的には筆記用具OBの反射率に関する情報である反射率情報を検出する。
検出エリアRDETとは、筆記用具OBが検出されるエリア(領域)であって、具体的には、例えば照射光LTが筆記用具OBに反射されることによる反射光LRを、受光部RUが受光して、筆記用具OBを検出することができるエリアである。より具体的には、受光部RUが反射光LRを受光して筆記用具OBを検出することが可能であって、かつ、その検出精度について、許容できる範囲の精度が確保できるエリアである。
【0016】
処理部300は、検出部200が検出した対象物情報に基づいて種々の処理を行う。この処理部300の機能は、例えばCPU等のプロセッサー及びプロセッサーで実行されるプログラムや、専用ICなどにより実現できる。
照射部EUは、検出エリアRDETに対して照射光LTを出射する。後述するように、照射部EUは、LED(発光ダイオード)等の発光素子から成る光源部を含み、光源部が発光することで、例えば赤外光(可視光領域に近い近赤外線)を出射する。
受光部RUは、照射光LTが筆記用具OBにより反射することによる反射光LRを受光する。受光部RUは、複数の受光ユニットPDを含んでもよい。受光ユニットPDは、例えばフォトダイオードやフォトトランジスターなどを用いることができる。
【0017】
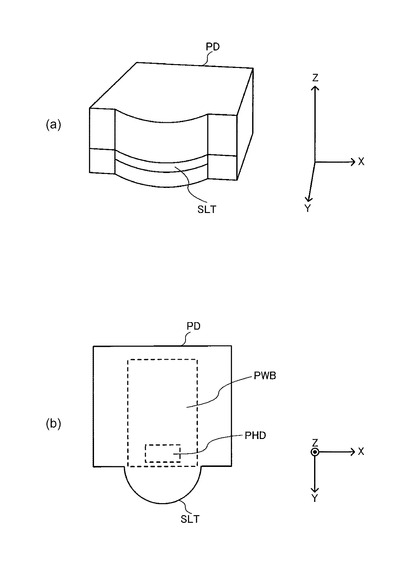
図4に、本実施形態の受光部RUの具体的な構成例を示す。図4の構成例では、受光部RUは受光ユニットPDを含む。受光ユニットPDは、入射光が入射する角度(Y−Z平面上の角度)を制限するためのスリット等(入射光制限部)が設けられ、検出エリアRDETに存在する筆記用具OBからの反射光LRを受光する。検出部200は、受光ユニットPDの受光結果に基づいて、X座標情報及びY座標情報を検出する。なお、照射部EUは、検出エリアRDETに対して照射光LTを出射する。また検出エリアRDETは、X−Y平面に沿ったエリアである。なお、図4の構成例は1つの受光ユニットで構成されるが、2つ以上の受光ユニットを含む構成としてもよい。
【0018】
図5(A)、図5(B)に、スリットSLT(入射光制限部)を有する受光ユニットPDの構成例を示す。図5(A)に示すように、受光素子PHDの前面にスリットSLTを設けて、入射する入射光を制限する。スリットSLTはX−Y平面に沿って設けられ、入射光が入射するZ方向の角度を制限することができる。すなわち受光ユニットPDは、スリットSLTのスリット幅で規定される所定の角度で入射する入射光を受光することができる。
図5(B)は、スリットSLTを有する受光ユニットの上から見た平面図である。例えばアルミニウム等の筐体(ケース)内に配線基板PWBが設けられ、この配線基板PWB上に受光素子PHDが実装される。
【0019】
図6に、本実施形態の照射部EUの詳細な構成例を示す。図6の構成例の照射部EUは、光源部LS1、LS2と、ライトガイドLGと、照射方向設定部LEを含む。また反射シートRSを含む。そして照射方向設定部LEは光学シートPS及びルーバーフィルムLFを含む。なお、本実施形態の照射部EUは、図6の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0020】
光源部LS1、LS2は、光源光を出射するものであり、LED(発光ダイオード)等の発光素子を有する。この光源部LS1、LS2は例えば赤外光(可視光領域に近い近赤外線)の光源光を放出する。即ち、光源部LS1、LS2が発光する光源光は、ユーザーの指やタッチペン等の対象物により効率的に反射される波長帯域の光や、外乱光となる環境光にあまり含まれない波長帯域の光であることが望ましい。具体的には、人体の表面での反射率が高い波長帯域の光である850nm付近の波長の赤外光や、環境光にあまり含まれない波長帯域の光である950nm付近の赤外光などである。
【0021】
光源部LS1は、図6のF1に示すようライトガイドLGの一端側に設けられる。また第2の光源部LS2は、F2に示すようにライトガイドLGの他端側に設けられる。そして光源部LS1が、ライトガイドLGの一端側(F1)の光入射面に対して光源光を出射することで、照射光LT1を出射し、第1の照射光強度分布LID1を対象物の検出エリアに形成(設定)する。一方、光源部LS2が、ライトガイドLGの他端側(F2)の光入射面に対して第2の光源光を出射することで、第2の照射光LT2を出射し、第1の照射光強度分布LID1とは強度分布が異なる第2の照射光強度分布LID2を検出エリアに形成する。このように照射部EUは、検出エリアRDETでの位置に応じて強度分布が異なる照射光を出射することができる。
【0022】
ライトガイドLG(導光部材)は、光源部LS1、LS2が発光した光源光を導光するものである。例えばライトガイドLGは、光源部LS1、LS2からの光源光を曲線状の導光経路に沿って導光し、その形状は曲線形状になっている。具体的には図6ではライトガイドLGは円弧形状になっている。なお図6ではライトガイドLGはその中心角が180度の円弧形状になっているが、中心角が180度よりも小さい円弧形状であってもよい。ライトガイドLGは、例えばアクリル樹脂やポリカーボネートなどの透明な樹脂部材等により形成される。
ライトガイドLGの外周側及び内周側の少なくとも一方には、ライトガイドLGからの光源光の出光効率を調整するための加工が施されている。加工手法としては、例えば反射ドットを印刷するシルク印刷方式や、スタンパーやインジェクションで凹凸を付ける成型方式や、溝加工方式などの種々の手法を採用できる。
【0023】
プリズムシートPSとルーバーフィルムLFにより実現される照射方向設定部LEは、ライトガイドLGの外周側に設けられ、ライトガイドLGの外周側(外周面)から出射される光源光を受ける。そして曲線形状(円弧形状)のライトガイドLGの内周側から外周側へと向かう方向に照射方向が設定された照射光LT1、LT2を出射する。即ち、ライトガイドLGの外周側から出射される光源光の方向を、ライトガイドLGの例えば法線方向(半径方向)に沿った照射方向に設定(規制)する。これにより、ライトガイドLGの内周側から外周側に向かう方向に、照射光LT1、LT2が放射状に出射されるようになる。
【0024】
このような照射光LT1、LT2の照射方向の設定は、照射方向設定部LEのプリズムシートPSやルーバーフィルムLFなどにより実現される。例えばプリズムシートPSは、ライトガイドLGの外周側から低視角で出射される光源光の方向を、法線方向側に立ち上げて、出光特性のピークが法線方向になるように設定する。またルーバーフィルムLFは、法線方向以外の方向の光(低視角光)を遮光(カット)する。
【0025】
このように本実施形態の照射部EUによれば、ライトガイドLGの両端に光源部LS1、LS2を設け、これらの光源部LS1、LS2を交互に点灯させることで、2つの照射光強度分布を形成することができる。すなわちライトガイドLGの一端側の強度が高くなる照射光強度分布LID1と、ライトガイドLGの他端側の強度が高くなる照射光強度分布LID2を交互に形成することができる。
【0026】
このような照射光強度分布LID1、LID2を形成し、これらの強度分布の照射光による対象物の反射光を受光することで、環境光などの外乱光の影響を最小限に抑えた、より精度の高い対象物の検出が可能になる。即ち、外乱光に含まれる赤外成分を相殺することが可能になり、この赤外成分が対象物の検出に及ぼす悪影響を最小限に抑えることが可能になる。
【0027】
<光学式位置検出装置による座標検出手法>
図7(A)、図5(B)は、本実施形態に係るペン型入力機器1に利用可能な光学式位置検出装置100による、座標情報検出の手法を説明する図である。
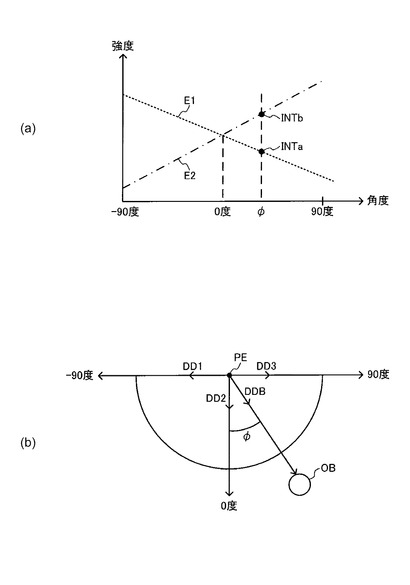
図7(A)のE1は、図4の照射光強度分布LID1において、照射光LT1の照射方向の角度と、その角度での照射光LT1の強度との関係を示す図である。図7(A)のE1では、照射方向が図7(B)のDD1の方向(左方向)である場合に強度が最も高くなる。一方、DD3の方向(右方向)である場合に強度が最も低くなり、DD2の方向ではその中間の強度になる。具体的には方向DD1から方向DD3への角度変化に対して照射光の強度は単調減少しており、例えばリニア(直線的)に変化している。なお図7(B)では、ライトガイドLGの円弧形状の中心位置が、照射部EUの配置位置PEになっている。
【0028】
また図7(A)のE2は、図6の照射光強度分布LID2において、照射光LT2の照射方向の角度と、その角度での照射光LT2の強度との関係を示す図である。図7(A)のE2では、照射方向が図7(B)のDD3の方向である場合に強度が最も高くなる。一方、DD1の方向である場合に強度が最も低くなり、DD2の方向ではその中間の強度になる。具体的には方向DD3から方向DD1への角度変化に対して照射光の強度は単調減少しており、例えばリニアに変化している。なお図7(A)では照射方向の角度と強度の関係はリニアな関係になっているが、本実施形態はこれに限定されず、例えば双曲線の関係等であってもよい。
【0029】
そして図7(B)に示すように、角度φの方向DDBに筆記用具OBが存在したとする。すると、光源部LS1が発光することで照射光強度分布LID1を形成した場合(E1の場合)には、図7(A)に示すように、DDB(角度φ)の方向に存在する筆記用具OBの位置での強度はINTaになる。一方、光源部LS2が発光することで照射光強度分布LID2を形成した場合(E2の場合)には、DDBの方向に存在する筆記用具OBの位置での強度はINTbになる。
【0030】
従って、これらの強度INTa、INTbの関係を求めることで、筆記用具OBの位置する方向DDB(角度φ)を特定できる。そして例えば後述する図8(A)、図8(B)の手法により光学式位置検出装置の配置位置PEからの筆記用具OBの距離を求めれば、求められた距離と方向DDBとに基づいて筆記用具OBの位置を特定できる。或いは、後述する図9に示すように、照射部EUとして2個の照射ユニットEU1、EU2を設け、EU1、EU2の各照射ユニットに対する筆記用具OBの方向DDB1(φ1)、DDB2(φ2)を求めれば、これらの方向DDB1、DDB2と照射ユニットEU1、EU2間の距離DSとにより、筆記用具OBの位置を特定できる。
【0031】
このような強度INTa、INTbの関係を求めるために、本実施形態では、受光部RUが、照射光強度分布LID1を形成した際の筆記用具OBの反射光(第1の反射光)を受光する。この時の反射光の検出受光量をGaとした場合に、このGaが強度INTaに対応するようになる。また受光部RUが、照射光強度分布LID2を形成した際の筆記用具OBの反射光(第2の反射光)を受光する。この時の反射光の検出受光量をGbとした場合に、このGbが強度INTbに対応するようになる。従って、検出受光量GaとGbの関係が求まれば、強度INTa、INTbの関係が求まり、筆記用具OBの位置する方向DDBを求めることができる。
【0032】
例えば光源部LS1の制御量(例えば電流量)、変換係数、放出光量を、各々、Ia、k、Eaとする。また光源部LS2の制御量(電流量)、変換係数、放出光量を、各々、Ib、k、Ebとする。すると下式(1)、(2)が成立する。
Ea=k・Ia (1)
Eb=k・Ib (2)
【0033】
また光源部LS1からの光源光(第1の光源光)の減衰係数をfaとし、この光源光に対応する反射光(第1の反射光)の検出受光量をGaとする。また光源部LS2からの光源光(第2の光源光)の減衰係数をfbとし、この光源光に対応する反射光(第2の反射光)の検出受光量をGbとする。すると下式(3)、(4)が成立する。
Ga=fa・Ea=fa・k・Ia (3)
Gb=fb・Eb=fb・k・Ib (4)
従って、検出受光量Ga、Gbの比は下式(5)のように表せる。
Ga/Gb=(fa/fb)・(Ia/Ib) (5)
【0034】
ここでGa/Gbは、受光部RUでの受光結果から特定することができ、Ia/Ibは、照射部EUの制御量から特定することができる。そして図5(A)の強度INTa、INTbと減衰係数fa、fbとは一意の関係にある。例えば減衰係数fa、fbが小さな値となり、減衰量が大きい場合は、強度INTa、INTbが小さいことを意味する。一方、減衰係数fa、fbが大きな値となり、減衰量が小さい場合は、強度INTa、INTbが大きいことを意味する。従って、上式(5)から減衰率の比fa/fbを求めることで、対象物の方向、位置等を求めることが可能になる。
【0035】
より具体的には、一方の制御量IaをImに固定し、検出受光量の比Ga/Gbが1になるように、他方の制御量Ibを制御する。例えば光源部LS1、LS2を逆相で交互に点灯させる制御を行い、検出受光量の波形を解析し、検出波形が観測されなくなるように(Ga/Gb=1になるように)、他方の制御量Ibを制御する。そして、この時の他方の制御量Ib=Im・(fa/fb)から、減衰係数の比fa/fbを求めて、対象物の方向、位置等を求める。
【0036】
また下式(6)、(7)のように、Ga/Gb=1になると共に制御量IaとIbの和が一定になるように制御してもよい。
Ga/Gb=1 (6)
Im=Ia+Ib (7)
上式(6)、(7)を上式(5)に代入すると下式(8)が成立する。
Ga/Gb=1=(fa/fb)・(Ia/Ib)
=(fa/fb)・{(Im−Ib)/Ib} (8)
上式(8)より、Ibは下式(9)のように表される。
Ib={fa/(fa+fb)}・Im (9)
ここでα=fa/(fa+fb)とおくと、上式(9)は下式(10)のように表され、減衰係数の比fa/fbは、αを用いて下式(11)のように表される。
Ib=α・Im (10)
fa/fb=α/(1−α) (11)
【0037】
従って、Ga/Gb=1になると共にIaとIbの和が一定値Imになるように制御すれば、そのときのIb、Imから上式(10)によりαを求め、求められたαを上式(11)に代入することで、減衰係数の比fa/fbを求めることができる。これにより、対象物の方向、位置等を求めることが可能になる。そしてGa/Gb=1になると共にIaとIbの和が一定になるように制御することで、外乱光の影響等を相殺することが可能になり、検出精度の向上を図れる。
【0038】
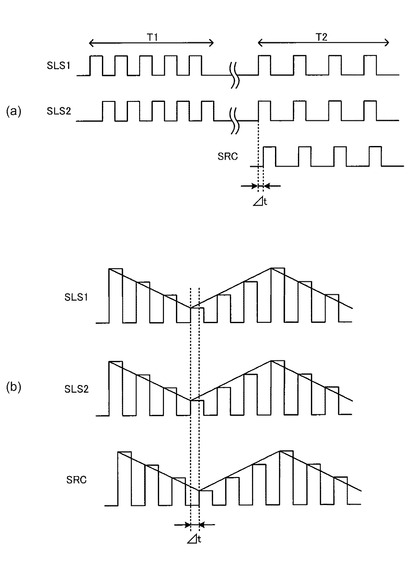
次に本実施形態の光学式検出システムを用いて対象物の座標情報を検出する手法の一例について説明する。図8(A)は、光源部LS1、LS2の発光制御についての信号波形例である。信号SLS1は、光源部LS1の発光制御信号であり、信号SLS2は、光源部LS2の発光制御信号であり、これらの信号SLS1、SLS2は逆相の信号になっている。また信号SRCは受光信号である。
例えば光源部LS1は、信号SLS1がHレベルの場合に点灯(発光)し、Lレベルの場合に消灯する。また光源部LS2は、信号SLS2がHレベルの場合に点灯(発光)し、Lレベルの場合に消灯する。従って図8(A)の第1の期間T1では、光源部LS1と光源部LS2が交互に点灯するようになる。即ち光源部LS1が点灯している期間では、光源部LS2は消灯する。これにより図6に示すような照射光強度分布LID1が形成される。一方、光源部LS2が点灯している期間では、光源部LS1は消灯する。これにより図6に示すような照射光強度分布LID2が形成される。
【0039】
このように検出部200は、第1の期間T1において、光源部LS1と光源部LS2を交互に発光(点灯)させる制御を行う。そしてこの第1の期間T1において、光学式位置検出装置(照射部)から見た対象物の位置する方向が検出される。具体的には、例えば上述した式(6)、(7)のようにGa/Gb=1になると共に制御量IaとIbの和が一定になるような発光制御を、第1の期間T1において行う。そして図7(B)に示すように筆記用具OBの位置する方向DDBを求める。例えば上式(10)、(11)から減衰係数の比fa/fbを求め、図7(A)、図7(B)で説明した手法により筆記用具OBの位置する方向DDBを求める。
【0040】
そして第1の期間T1に続く第2の期間T2では、受光部RUでの受光結果に基づいて筆記用具OBまでの距離(方向DDBに沿った方向での距離)を検出する。そして、検出された距離と、筆記用具OBの方向DDBとに基づいて、対象物の位置を検出する。即ち図7(B)において、光学式位置検出装置の配置位置PEから筆記用具OBまでの距離と、筆記用具OBの位置する方向DDBを求めれば、筆記用具OBのX、Y座標位置を特定できる。このように、光源の点灯タイミングと受光タイミングの時間のずれから距離を求め、これと角度結果を併せることで、筆記用具OBの位置を特定できる。
具体的には図8(A)では、発光制御信号SLS1、SLS2による光源部LS1、LS2の発光タイミングから、受光信号SRCがアクティブになるタイミング(反射光を受光したタイミング)までの時間Δtを検出する。即ち、光源部LS1、LS2からの光が筆記用具OBに反射されて受光部RUで受光されるまでの時間Δtを検出する。この時間Δtを検出することで、光の速度は既知であるため、筆記用具OBまでの距離を検出できる。即ち、光の到達時間のずれ幅(時間)を測定し、光の速度から距離を求める。
【0041】
なお、光の速度はかなり速いため、電気信号だけでは単純な差分を求めて時間Δtを検出することが難しいという問題もある。このような問題を解決するためには、図8(B)に示すように発光制御信号の変調を行うことが望ましい。ここで図8(B)は、制御信号SLS1、SLS2の振幅により光の強度(電流量)を模式的に表している模式的な信号波形例である。
具体的には図8(B)では、例えば公知の連続波変調のTOF(Time Of Flight)方式で距離を検出する。この連続波変調TOF方式では、一定周期の連続波で強度変調した連続光を用いる。そして、強度変調された光を照射すると共に、反射光を、変調周期よりも短い時間間隔で複数回受光することで、反射光の波形を復調し、照射光と反射光との位相差を求めることで、距離を検出する。なお図8(B)において制御信号SLS1、SLS2のいずれか一方に対応する光のみを強度変調してもよい。また図8(B)のようなクロック波形ではなく、連続的な三角波やSin波で変調した波形であってもよい。また、連続変調した光としてパルス光を用いるパルス変調のTOF方式で、距離を検出してもよい。距離検出手法の詳細については例えば特開2009−8537号などに開示されている。
【0042】
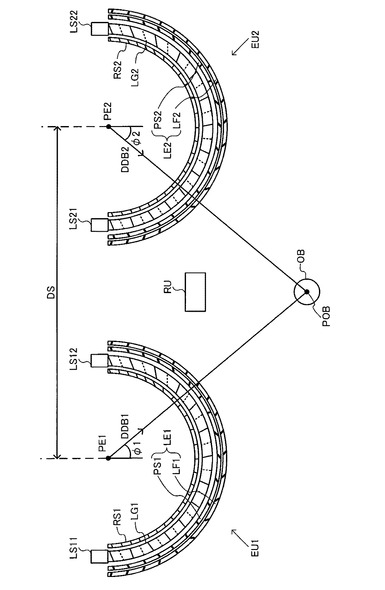
図9に、本実施形態の照射部EUの変形例を示す。図9では、照射部EUとして第1、第2の照射ユニットEU1、EU2が設けられる。これらの第1、第2の照射ユニットEU1、EU2は、筆記用具OBの検出エリアRDETの面に沿った方向において所与の距離DSだけ離れて配置される。即ち図1のX軸方向に沿って距離DSだけ離れて配置される。
【0043】
第1の照射ユニットEU1は、照射方向に応じて強度が異なる第1の照射光を放射状に出射する。第2の照射ユニットEU2は、照射方向に応じて強度が異なる第2の照射光を放射状に出射する。受光部RUは、第1の照射ユニットEU1からの第1の照射光が筆記用具OBに反射されることによる第1の反射光と、第2の照射ユニットEU2からの第2の照射光が筆記用具OBに反射されることによる第2の反射光を受光する。そして検出部200は、受光部RUでの受光結果に基づいて、筆記用具OBの位置POBを検出する。
具体的には検出部200は、第1の反射光の受光結果に基づいて、第1の照射ユニットEU1に対する筆記用具OBの方向を第1の方向DDB1(角度φ1)として検出する。また第2の反射光の受光結果に基づいて、第2の照射ユニットEU2に対する筆記用具OBの方向を第2の方向DDB2(角度φ2)として検出する。そして検出された第1の方向DDB1(φ1)及び第2の方向DDB2(φ2)と、第1、第2の照射ユニットEU1、EU2の間の距離DSとに基づいて、筆記用具OBの位置POBを求める。
【0044】
図9の変形例によれば、図8(A)、図8(B)のように光学式位置検出装置と筆記用具OBとの距離を求めなくても、筆記用具OBの位置POBを検出できるようになる。
【0045】
<ペン型入力機器の3次元での位置情報の取得>
次に、ペン型入力機器1の3次元での位置情報を取得する手法について説明する。
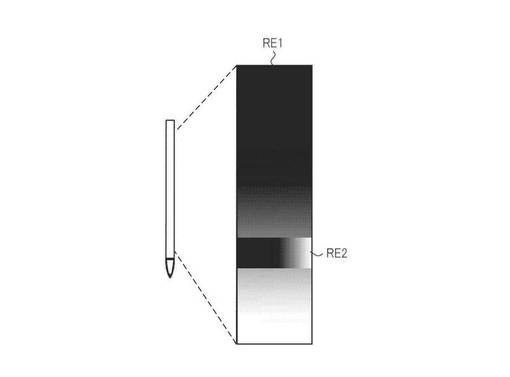
本実施形態で用いられる筆記用具の例を図10に示す。尚、筆記用具の柄の部分に設けられる反射部の拡大図も示す。
【0046】
筆記用具は、図10に示したように、長手方向において反射率が異なる反射部材(第1の反射部RE1)と、長手方向に沿った軸の軸周りの回転方向において反射率が異なる反射部材(第2の反射部RE2)とが設けられる。長手方向に設けられた第1の反射部RE1での反射光に基づいて、長手方向における移動量(押し込み量)を求め、回転方向に設けられた第2の反射部RE2での反射光に基づいて、回転方向における回転量を求める。
【0047】
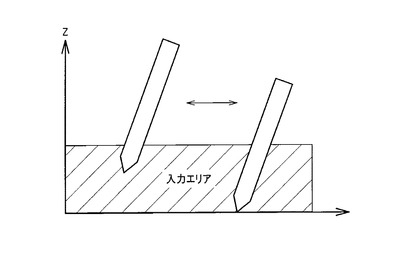
また、長手方向における移動量を検出するための構造については複数の手法が考えられる。例えば、図11に示すように筆記用具を第1の部分と第2の部分に分け、第1の部分と第2の部分をバネのような伸縮可能な素材で結ぶ手法が考えられる。このようにしても、バネが縮むことにより、ペン先が対象面に触れている状態から、さらに筆記用具を対象面方向に押し込むことが可能になるため、長手方向における移動量を求められる。さらには、上述のような変形可能な素材やバネ機構を用いない筆記用具であってもよい。その場合には例えば、ペン先を対象面から浮かせた状態でも文字等を入力できるようにする。例えば図12に示すように、対象面からある程度のZ座標範囲を入力範囲と規定して、入力範囲に筆記用具が存在する場合に入力を行う。そして、その際の筆記用具のZ座標情報(例えばペン先部分のZ座標情報)を求め、その座標情報の大小から長手方向における移動量を求めればよい。
【0048】
<受光ユニットの構成例>
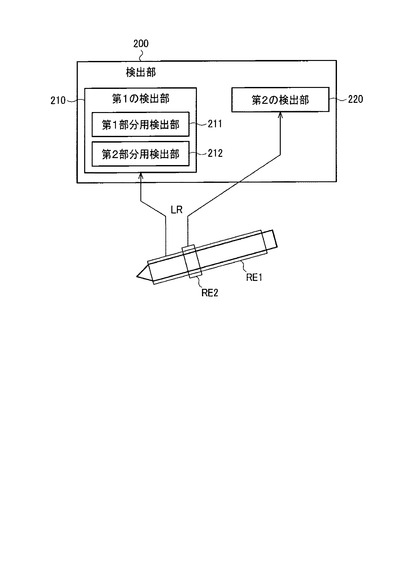
次に、光学式位置検出装置100の受光ユニットの構成例について述べる。なお、ここでは図13に示したような検出部200内の受光部RUに含まれる受光ユニットとして説明するが、詳細には、図14に示したような検出部200に含まれる第1の検出部210及び第2の検出部220等のことである。第1の検出部210は、第1の反射部RE1からの反射光を検出し、第2の検出部220は、第2の反射部RE2からの反射光を検出する。また、第1の検出部210は図13に示したように、第1部分用検出部211及び第2部分用検出部212等を含んでもよい。
【0049】
上述の光学式位置検出装置100の説明においては、受光ユニットは1つであるものとしていたが、本実施形態においては、受光ユニットは複数用いられるものとする。なお、上述したように、本実施形態で用いられる受光ユニットは、位置検出精度向上のため、受光する範囲(ここではZ座標範囲)が狭く限定されるものであることを前提としている。
【0050】
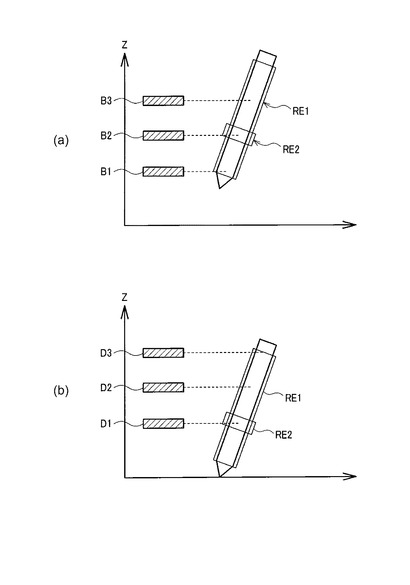
受光ユニットの構成例を図15(A)に示す。本実施形態においては、Z座標軸において異なる位置に複数の受光ユニットを設ける。ここでは特に3つの受光ユニットを設ける例について説明する。Z座標軸において異なる位置に設けられる受光ユニットのうち、長手方向における移動量を求めるために必要なものは、長手方向に設けられた第1の反射部RE1からの反射光を受光する受光ユニット1つである。また、回転方向での回転量を求めるために必要なものは、回転方向に設けられた第2の反射部RE2からの反射光を受光する受光ユニット1つである。さらに筆記用具の傾き(及びポインティング位置)を求める際には、第1の反射部RE1、第2の反射部RE2どちらからの反射光でもよいから異なる2点からの反射光を受光する2つの受光ユニットが必要となる。よって、傾きを求める際の2つの受光ユニットのうち、一方を長手方向での移動量情報を求める受光ユニットと兼用し、他方を回転方向での回転量情報を求める受光ユニットと兼用するとすれば、長手方向での移動量情報、回転方向での回転量情報及び傾きを求める際には合計2つの受光ユニットがあればよいことになる。
【0051】
しかし、図10に示したように、回転量検出用の第2の反射部RE2は、第1の反射部RE1と区別するために、長手方向において狭い領域に配置されている。つまり、筆記用具を対象面20に対して立てて使用するケースが想定されることに鑑みれば、長手方向とはZ軸方向に対応する方向になるため、回転量検出用の第2の反射部RE1は、Z座標において狭い範囲に配置されることになる。筆記用具の構成例において説明したように、長手方向において筆記用具はある程度移動することが想定されているため、筆記用具の長手方向への移動(バネ機構の伸縮を含む)に伴って、第2の反射部RE2からの反射光が受光ユニットで受光できなくなる可能性がある。
【0052】
そこで本実施形態では、Z座標軸において異なる位置に3つの受光ユニットを設ける。そして、第1の受光ユニットは第1の反射部RE1からの反射光を受光するものとする。また、第2の受光ユニット及び第3の受光ユニットは、筆記用具の長手方向での移動量を考慮した位置に設けられ、第2の受光ユニットと第3の受光ユニットのどちらかで、第2の反射部RE2からの反射光を受光する。その際、第2の反射部RE2からの反射光を受光しない方の受光ユニットは、第1の反射部RE1からの反射光を受光する。一例を図15(A)、図15(B)に示す。図15(A)のように、押し込み量が小さい状態において、第2の反射部RE2からの反射光を受光する位置(B2)に第2の受光ユニットを設け、図15(B)のように、押し込み量が大きい状態において第2の反射部RE2からの反射光を受光する位置(D1)に第3の受光ユニットを設ける。そして、図15(A)の状態では、第1の受光ユニット(B3)及び第3の受光ユニット(B1)で、第1の反射部RE1からの反射光を受光し、長手方向における移動量を求め、第2の受光ユニット(B2)で、第2の反射部RE2からの反射光を受光し、回転量を求める。同様に、図15(B)の状態では、第1の受光ユニット(D1)及び第2の受光ユニット(D2)で、第1の反射部RE1からの反射光を受光し、長手方向における移動量を求め、第3の受光ユニット(D1)で、第2の反射部RE2からの反射光を受光し、回転量を求める。
【0053】
ただし、受光ユニットの構成例は上述したものに限定されるわけではない。第2の反射部RE2をZ長手方向において広い範囲に設定できるのであれば、2つの受光ユニットで十分である。また、長手方向における移動量及び回転量のどちらか一方を求めるのであれば、2つの受光ユニットを設ければ足りる。ここで、2つとしているのは傾き情報の取得を前提としているためであり、筆記用具の傾きも必要ないとなれば、1つの受光ユニットを設けるだけでもよい。
【0054】
<入力データの取得手法>
次に入力用データの取得手法について説明する。
まず、入力位置の基準位置を設定するためのキャリブレーションを行う必要がある。ここでは具体例として、筆記用具を対象面方向に対して完全に押し込んだ時を基準位置とする。
具体的には、筆記用具を対象面に対して完全に押し込んだ時の各受光ユニットにおける受光量に基づいて、3つの反射率情報をキャリブレーション情報として取得する。
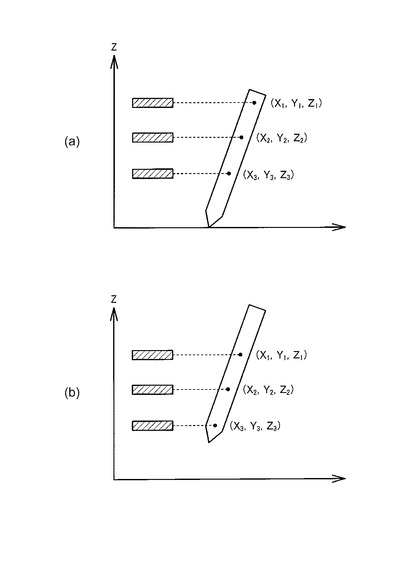
次に、各受光部においてX座標情報及びY座標情報を取得する。座標情報の取得手法については、光学式位置検出装置の説明において上述したとおりである。3つの受光ユニットを用いる例においては、第1の受光ユニットにおいて座標情報(X1,Y1)を取得し、第2の受光ユニットにおいて座標情報(X2,Y2)を取得し、第3の受光ユニットにおいて座標情報(X3,Y3)を取得する。そして、第1の受光ユニットが設けられているZ座標位置がZ1であり、且つ、受光ユニットはZ座標において狭い範囲の光を受光することから、第1の受光ユニットからの座標情報として、(X1,Y1,Z1)という3次元情報を取得する。同様に、第2の受光ユニットから(X2,Y2,Z2)を取得し、第3の受光ユニットから(X3,Y3,Z3)を取得する。これにより、筆記用具の傾きがわかるため(ただし、筆記用具は直線的な棒状のものとしている)、筆記用具と対象面(描画面)との接触位置を求めることができ、接触位置はそのまま署名位置として用いることが可能である。
【0055】
<反射率情報の取得>
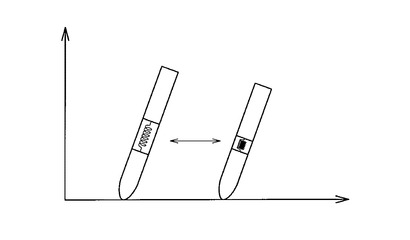
3つの3次元座標情報を取得したとしても、筆記用具の長手方向における移動量や回転方向における回転量を求めることはできない。なぜなら、上述の3次元座標情報からは、3点を通る位置に筆記用具が存在することがわかるだけであり、図16(A)の状態なのか、図16(B)の状態なのかを判別できないからである。
【0056】
そのため、本実施形態においては、筆記用具に設けられた第1、第2の反射部の反射率情報をあわせて取得する。第1の反射部RE1は、上述したように、筆記用具の長手方向においてグラデーションを描くように反射率が変化する。そのため、反射率情報(具体的には受光ユニットにおける電流値等)を用いることで、受光ユニットで検出した情報が、筆記用具のどの部分に対応するものかを判定することができる。例えば、筆記用具の端部からs1[cm]のポイントが(X1,Y1,Z1)に存在し、かつ、s2[cm]のポイントが(X2,Y2,Z2)に存在するということがわかれば、筆記用具の3次元位置を詳細に求めることができる。同様に、第2の反射部RE2は、長手方向に沿った軸の軸周りでの回転方向においてグラデーションを描くように反射率が変化する。そのため、筆記用具のどの部分が受光ユニットの方向を向いているかを求めることができる。
【0057】
なお、反射率情報により表される値(受光ユニットにおける電流値等)の絶対値をそのまま用いる手法には限定されない。むしろ、照射部EUにおける照射光の強度が変化する等の要因があった場合には、電流値は全体的に変化するため、1つの値の絶対値を用いたのでは問題が生じてしまう。そのため、2つの時点での反射率情報を取得し、その比較により位置情報(長手方向における移動量、回転量等)を求めてもよい。具体的には例えば、上述したキャリブレーション時の値を用いる手法が考えられる。キャリブレーション情報を基準として、キャリブレーション情報の値からの変化を検出する。上述の例では、完全に押し込んだ状態を基準位置としているため、キャリブレーション情報からの変化に基づいて、完全に押し込んだ状態からどれだけ移動或いは回転しているかを求めることができる。
【0058】
また、キャリブレーションを行ってから、実際の検出処理を行うまでの間に照射光強度の変化等の要因が発生するおそれもある。その場合には、ある時刻T1と、別の時刻T2での反射率情報をそれぞれ検出し、T1での反射率情報とT2での反射率情報との差を求めてもよい。この場合には、基準位置との比較ではないので、筆記用具の絶対的な位置を求めることはできないが、T1からT2の間での移動量(例えば長手方向における移動量、或いは回転方向における回転量等)を求めることが可能になる。この際、T1とT2の間隔を十分短い間隔に設定しておけば、照射光強度等の変化等による影響を抑止することができる。
【0059】
<署名認証の方法>
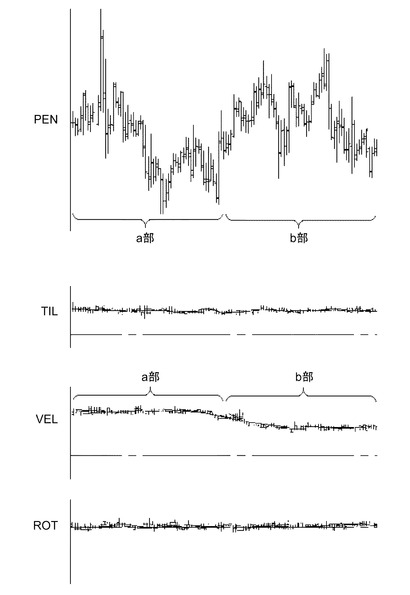
上述したように、ペン型入力機器1によって、3次元的ペン位置が検出されるので、その3次元的ペン位置情報に基づいて、認証因子が抽出され、署名者毎の特有のプロファイルデータが生成される。このプロファイルデータの基になる認証因子が時系列に配列されたデータの一例を図17に示す。これは、例えば、「山田浩(やまだひろし)」と署名した例とする。
【0060】
ここで、ペン先の位置検出用情報PENは、ペン型入力機器1の受光部RUが、署名者の署名時において検出した受光強度を時系列に表示した信号波形である。この信号波形を前述したX座標、Y座標の検出の計算を行うことで、ペン先であるところの筆記用具OBの先端の位置の変化を計算することができ、その結果、信号波形のa部は「山田」、信号波形のb部は「浩」と記載していることを判別することができる。
【0061】
ペン傾き情報TILは、ペン型入力機器1で計算した筆記用具OB(ペン)の傾きの変化を時系列に表示しや信号波形である。この信号レベルは、署名動作中、殆ど一定の値をしており、この署名者はペンの傾きを常に一定に保持して署名する癖があることが分かる。また、ペン速度情報VELは、ペン型入力機器1で計算した筆記用具OB(ペン)の移動量を単位時間で割った値、すなわち、ペンの速度変化を示している。信号のレベルがa部よりb部の方が低い値を示している。これにより、この署名者は「山田」という苗字を書く時よりも、「浩」という名前を書く時の方が、ペン速度をゆっくり書くという癖があることが分かる。
【0062】
また、ペン回転情報ROTは、ペン型入力機器1で計算した筆記用具OB(ペン)の回転速度を表示している。この信号レベルの変化が殆ど無いことから、ペンを殆ど回転させずに署名していることが分かる。ボールペンや万年筆の場合、ペンを殆ど回転させない場合が多いが、毛筆ペンの場合、ペンを回転させて書く場合もあり、署名認証において、ペンの回転を検出することは認証精度の改善に有益になる場合もある。
【0063】
署名の真偽認証では、図17に示す認証因子からプロファイルデータを作成し。そのプロファイルデータと基準データを比較するものである。まず、ペン先の位置検出用情報PENから筆跡画像(例えばビットマップデータ)を生成する。そして、筆跡画像の類似性を比較にし、基準データの筆跡画像と比較する。この画像データの比較は筆跡認証ソフトウェア等を用意すればよい。
【0064】
本実施例では、ペン型入力機器1は3次元位置が検出できるので、筆跡のビットマットデータを作成することができる為、上述した例では、筆記用具OB(ペン)の先端の位置を検出し、それを一旦筆跡画像に変換し、その筆跡画像の形から真偽判定を行う方法を説明した。
しかしながら、筆跡画像を作成することは必ずしも必要ではない。署名認証のみ行う場合、筆記用具OB(ペン)の位置であるX座標及びY座標を計算せずに、反射光の信号波形自体で比較することも可能である。つまり、基準データ登録時において、反射光の信号波形自体を基準データとして登録し、認証時には署名者が署名動作した時の信号波形をプロファイルデータとして、そのプロファイルデータと基準データとを比較するのである。これは、本実施例に用いるペン型入力機器1は、極めて特徴ある光の出射方法を用いているので、その出射光を筆記用具OB(ペン)で反射する光の強度レベルの信号波形は声紋のような個人特有のパターンを持っていることになり、この個人特有のパターンを直接、プロファイルデータとして利用することが可能なために実現できる。
【符号の説明】
【0065】
1 ペン型入力機器、2 認証因子抽出・生成部、3 基準データ登録部、
4 データベース、5 認証部、
20 対象面、100 光学式位置検出装置、200 検出部、210 検出部、
211 第1部分用検出部、212 第2部分用検出部、220 検出部、
300 処理部、EU 照射部、LE 照射方向設定部、LF ルーバーフィルム、
LG ライトガイド、OB 対象物、PD 受光ユニット、
PD1 第1の受光ユニット、PD2 第2の受光ユニット、
PD3 第3の受光ユニット、PHD 受光素子、PS プリズムシート、
PS 光学シート、PWB 配線基板、RE1 第1の反射部、RE2 第2の反射部、
RS 反射シート、RU 受光部、SLT スリット、
PEN 位置検出用情報。
【技術分野】
【0001】
本発明は、署名等の手書きデータの真偽を識別するための認証システムに関する。
【背景技術】
【0002】
従来から、US特許5123064号(特許文献2)、US特許5448044号(特許文献3)等に開示されているように、各社から多くのシグネチャーパッドと呼ばれる電子署名認証機器が販売されている。これらは、一般に平面上での筆跡データを読み取るものであるが、近年、3次元で筆跡を読み取る技術が提案されてきた。
特許文献1においては詳細な説明が無いものの、上記の署名認証システムでは、3次元位置を検出できるので、例えば、署名時のペンの傾き等も検出することが出来る。即ち、署名する個人の癖も読み取ることが出来るので、3次元検出は平面上の筆跡データのみの署名認証よりも信頼性を高めることが出来ると言える。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−9280号公報
【特許文献2】米国特許第5123064号明細書
【特許文献3】米国特許第5448044号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に示された書名認証システムは、ステレオカメラで取得した画像データを用いる為に、CPUのデータ処理に膨大な容量が必要となる。画像データを取得すると、実際に署名認証に必要なデータ以外の多くのデータ、例えば、背景画像や腕の画像も取得してしまうので、そういった無関係の画像データを排除しなければ、ノイズとなり、かえって信頼性が低下してしまうのである。
そこで、本発明の目的は、カメラ等で撮像画像データを取得する必要なしに、3次元的にペンの動きを読み取る署名認証装置、若しくは、3次元的なペンの動きによって得られる署名者毎の署名者特有情報を読み取る署名認証装置を提供することにある。
【課題を解決するための手段】
【0005】
(1)
本発明の一態様は、署名認証システムであって、手書き用の筆記用具と、前記筆記用具に照射光を出射する照射部と、前記照射光が前記筆記用具により反射する反射光を検出する検出部と、前記検出部での検出結果に基づいて処理を行う処理部と、特定の情報を記憶する記憶部と、前記処理部で処理された情報と前記特定の情報とを照合する照合部と、を含み、前記筆記用具は、前記筆記用具の長手方向において反射率の異なる第1の反射部、及び前記長手方向に沿った軸の軸周りでの回転方向において反射率の異なる第2の反射部の少なくとも一方を有し、前記検出部は、前記第1の反射部及び前記第2の反射部の少なくとも一方からの反射光を検出し、前記処理部は、前記検出部での検出結果に基づいて、前記第1の反射部の前記長手方向での移動量情報及び前記第2の反射部の前記回転方向での回転量情報の少なくとも一方を求めることを特徴とする。
上記構成によれば、筆記用具は第1の反射部及び第2の反射部の少なくとも一方を有し、第1の反射部の長手方向での移動量情報及び第2の反射部の回転方向での回転量情報の少なくとも一方を求めることができる。よって、筆記用具の傾き等の3次元的な動き情報を取得することが可能になる。
【0006】
(2)
また、本発明の一態様では、前記第1の反射部は、前記筆記用具の前記長手方向において徐々に反射率が変化し、前記第2の反射部は、前記長手方向に沿った軸の軸周りでの前記回転方向において徐々に反射率が変化する構成にしても良い。
上記構成によればり、長手方向或いは回転方向において反射率が徐々に変化する筆記用具を使用することができるため、筆記用具の動きを精度良く取得することが可能になる。
【0007】
(3)
また、本発明の一態様では、前記処理部は、前記第1の反射部での反射率の検出結果に基づいて、前記筆記用具の移動軌跡を求める構成にしても良い。
上記構成によれば、署名する人の筆跡を求めることができるため、例えば、筆跡をビットマップデータ等の画像データとして筆跡認証ソフトウェアでの真偽判定が可能になる。
【図面の簡単な説明】
【0008】
【図1】本実施形態の署名認証システムの基本構成を示すブロック図。
【図2】図1のブロック図を更に細分化したブロック図。
【図3】本実施形態で利用可能なペン型入力機器の構成例。
【図4】受光部の構成例。
【図5】図5(A)、図5(B)は受光ユニットの構成例。
【図6】照射部の構成例。
【図7】図7(A)、図7(B)は座標情報検出手法を説明する図。
【図8】図8(A)、図8(B)は発光制御信号の信号波形例。
【図9】照射部の他の構成例。
【図10】本実施形態で用いられる筆記用具の構成例。
【図11】伸縮可能な部材を用いることで筆記用具の例。
【図12】検出エリアを設けることで筆記用具の押し込み量を検出する例。
【図13】ペン型入力機器のブロック図。
【図14】検出部の構成例。
【図15】図15(A)、図15(B)は受光ユニットを3つ設ける例を説明する図。
【図16】図16(A)、図16(B)は3次元座標情報の取得に基づく筆記用具の位置の予測例。
【図17】認証因子の信号波形例。
【発明を実施するための形態】
【0009】
以下、本実施形態について説明する。なお、以下に説明する本実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また本実施形態で説明される構成の全てが、本発明の必須構成要件であるとは限らない。
図1は、本発明の一実施形態の署名認証システムの基本構成を示すブロック図である。この署名認証システムは、ペン型入力機器1と、ペン型入力機器1によって得られた情報から筆跡データの認証のための認証因子を抽出し、生成する認証因子抽出・生成部2と、認証因子抽出・生成部2で得られた各個人の筆跡を基準データとして記憶する基準データ登録部3と、各個人毎の複数の基準データを記憶するデータベースと、認証モードにおいては抽出された認証因子とデータベース4の基準データとを照合し、真偽識別の認証を行う認証部5とから構成されている。尚、真偽結果はAPI(アプリケーション・プログラム・インターフェース)6を介して出力される。
ここで、認証因子とは、筆跡であるペン先の動き、ペンの傾き、ペンの速度をXYZ座標から割り出したデータである。
【0010】
図2は、図1の装置を機能に基づいて細分化したブロック図である。ペン移動情報取込み(1a)により、ペンの3次元的な位置を時系列に取り込む。更に、ペン回転情報取込み(1b)により、ペンがペンの軸を中心に回転する情報を時系列に取り込み。そして、ペン移動情報は、ペン位置解析(2a)を経て、ペン先軌跡抽出(2c)と、ペン傾き抽出(2d)を行う。また、ペン移動情報は、ペン速度解析(2b)を経て、ペン速度抽出(2e)を行う。ペン回転情報により、ペン回転抽出(2f)を行う。ペン先軌跡、ペン傾き、ペン速度、ペン回転は正規化(2g)される。
【0011】
登録モードでは、正規化されたデータから特徴データを抽出(3)する。この特徴データは署名者毎の特有情報であり、すなわち、書名のプロファイルデータと言える。この特徴データには、ペン先の移動軌跡、ペン傾き、ペン速度という複数の認証因子で構成されている。筆跡は各個人の癖により、ペンの持ち方が常時一定でペン傾きが一定の人の場合、ペン傾きを重視して署名の真偽認証をすることが望ましい。また、各個人の癖によりペンを速く動かす人の場合、ペン速度を重視して署名の真偽認証をすることが望ましい。本実施例では、このような重みづけを行うパラメーターとして特徴関数パラメーターを設定する。例えば、署名者に同じ署名を3回書いて正規化したデータを取ると、署名者特有のプロファイルデータが3つ所得できる。これにより、その人の癖を見つけて特徴関数パラメーターを生成する。また、3回のプロファイルデータの平均値を基準データとする。そして、その特徴関数パラメーターと基準データをデータベース4に登録する。
【0012】
認証モードでは、正規化された抽出因子により特徴抽出(5a)を行いプロファイルデータを作成する。認証モードでは署名は通常1回であるので、1回の署名動作からプロファイルデータは作成される。そして、データベース4の基準データと比較(5b)を行うのであるが、書名は必ずしも、常に同じに出来るものではないので、1回の署名のプロファイルデータと基準データを比較すると、本人であっても、本人でないという誤った結論を導く可能性もある。そこで、特徴関数パラメーターによって、差異の許容範囲が設定される。これにより、信頼性の高い署名認証が可能になる。
【0013】
本実施例の署名認証システムでは、ペンの傾きも認証因子として考慮される。右利きの人と左利きの人では、ペンの傾きが全く逆であるので、本実施例の署名認証システムでは、右利きの人と左利きの人を錯誤する可能性は低くなる。これは、2次元署名認証システムには出来ない特徴であり、本実施例の署名認証システムの大きな利点になる。
【0014】
図3に、本実施形態に係るペン型入力機器1に利用可能な光学式位置検出装置100の基本的な構成例を示す。図3の光学式位置検出装置100は、検出部200、処理部300を含み、検出部200は照射部EU及び受光部RUを含む。
なお、ペン型入力機器1は、上述したように検出部200や処理部300を含む光学式位置検出装置100を用いて実現される形態には限定されない。情報処理装置(例えばPC等)により、検出部200や処理部300の機能が実現され、照射部EU及び受光部RUと、上記情報処理装置とが連動して動作する構成でもよい。
【0015】
検出部200は、照射光LTが筆記用具OB(ペン)により反射することによる反射光LRの受光結果に基づいて、筆記用具OBの情報(例えば、座標情報や反射率情報)を検出する。具体的には例えば、検出部200は、筆記用具OBが検出されるエリアである検出エリアRDETがX−Y平面に沿ったエリアである場合に、少なくとも検出エリアRDETに存在する筆記用具OBのX座標情報及びY座標情報を検出する。なお、検出部200による座標情報の検出手法については、後述する。また、具体的には筆記用具OBの反射率に関する情報である反射率情報を検出する。
検出エリアRDETとは、筆記用具OBが検出されるエリア(領域)であって、具体的には、例えば照射光LTが筆記用具OBに反射されることによる反射光LRを、受光部RUが受光して、筆記用具OBを検出することができるエリアである。より具体的には、受光部RUが反射光LRを受光して筆記用具OBを検出することが可能であって、かつ、その検出精度について、許容できる範囲の精度が確保できるエリアである。
【0016】
処理部300は、検出部200が検出した対象物情報に基づいて種々の処理を行う。この処理部300の機能は、例えばCPU等のプロセッサー及びプロセッサーで実行されるプログラムや、専用ICなどにより実現できる。
照射部EUは、検出エリアRDETに対して照射光LTを出射する。後述するように、照射部EUは、LED(発光ダイオード)等の発光素子から成る光源部を含み、光源部が発光することで、例えば赤外光(可視光領域に近い近赤外線)を出射する。
受光部RUは、照射光LTが筆記用具OBにより反射することによる反射光LRを受光する。受光部RUは、複数の受光ユニットPDを含んでもよい。受光ユニットPDは、例えばフォトダイオードやフォトトランジスターなどを用いることができる。
【0017】
図4に、本実施形態の受光部RUの具体的な構成例を示す。図4の構成例では、受光部RUは受光ユニットPDを含む。受光ユニットPDは、入射光が入射する角度(Y−Z平面上の角度)を制限するためのスリット等(入射光制限部)が設けられ、検出エリアRDETに存在する筆記用具OBからの反射光LRを受光する。検出部200は、受光ユニットPDの受光結果に基づいて、X座標情報及びY座標情報を検出する。なお、照射部EUは、検出エリアRDETに対して照射光LTを出射する。また検出エリアRDETは、X−Y平面に沿ったエリアである。なお、図4の構成例は1つの受光ユニットで構成されるが、2つ以上の受光ユニットを含む構成としてもよい。
【0018】
図5(A)、図5(B)に、スリットSLT(入射光制限部)を有する受光ユニットPDの構成例を示す。図5(A)に示すように、受光素子PHDの前面にスリットSLTを設けて、入射する入射光を制限する。スリットSLTはX−Y平面に沿って設けられ、入射光が入射するZ方向の角度を制限することができる。すなわち受光ユニットPDは、スリットSLTのスリット幅で規定される所定の角度で入射する入射光を受光することができる。
図5(B)は、スリットSLTを有する受光ユニットの上から見た平面図である。例えばアルミニウム等の筐体(ケース)内に配線基板PWBが設けられ、この配線基板PWB上に受光素子PHDが実装される。
【0019】
図6に、本実施形態の照射部EUの詳細な構成例を示す。図6の構成例の照射部EUは、光源部LS1、LS2と、ライトガイドLGと、照射方向設定部LEを含む。また反射シートRSを含む。そして照射方向設定部LEは光学シートPS及びルーバーフィルムLFを含む。なお、本実施形態の照射部EUは、図6の構成に限定されず、その構成要素の一部を省略したり、他の構成要素に置き換えたり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0020】
光源部LS1、LS2は、光源光を出射するものであり、LED(発光ダイオード)等の発光素子を有する。この光源部LS1、LS2は例えば赤外光(可視光領域に近い近赤外線)の光源光を放出する。即ち、光源部LS1、LS2が発光する光源光は、ユーザーの指やタッチペン等の対象物により効率的に反射される波長帯域の光や、外乱光となる環境光にあまり含まれない波長帯域の光であることが望ましい。具体的には、人体の表面での反射率が高い波長帯域の光である850nm付近の波長の赤外光や、環境光にあまり含まれない波長帯域の光である950nm付近の赤外光などである。
【0021】
光源部LS1は、図6のF1に示すようライトガイドLGの一端側に設けられる。また第2の光源部LS2は、F2に示すようにライトガイドLGの他端側に設けられる。そして光源部LS1が、ライトガイドLGの一端側(F1)の光入射面に対して光源光を出射することで、照射光LT1を出射し、第1の照射光強度分布LID1を対象物の検出エリアに形成(設定)する。一方、光源部LS2が、ライトガイドLGの他端側(F2)の光入射面に対して第2の光源光を出射することで、第2の照射光LT2を出射し、第1の照射光強度分布LID1とは強度分布が異なる第2の照射光強度分布LID2を検出エリアに形成する。このように照射部EUは、検出エリアRDETでの位置に応じて強度分布が異なる照射光を出射することができる。
【0022】
ライトガイドLG(導光部材)は、光源部LS1、LS2が発光した光源光を導光するものである。例えばライトガイドLGは、光源部LS1、LS2からの光源光を曲線状の導光経路に沿って導光し、その形状は曲線形状になっている。具体的には図6ではライトガイドLGは円弧形状になっている。なお図6ではライトガイドLGはその中心角が180度の円弧形状になっているが、中心角が180度よりも小さい円弧形状であってもよい。ライトガイドLGは、例えばアクリル樹脂やポリカーボネートなどの透明な樹脂部材等により形成される。
ライトガイドLGの外周側及び内周側の少なくとも一方には、ライトガイドLGからの光源光の出光効率を調整するための加工が施されている。加工手法としては、例えば反射ドットを印刷するシルク印刷方式や、スタンパーやインジェクションで凹凸を付ける成型方式や、溝加工方式などの種々の手法を採用できる。
【0023】
プリズムシートPSとルーバーフィルムLFにより実現される照射方向設定部LEは、ライトガイドLGの外周側に設けられ、ライトガイドLGの外周側(外周面)から出射される光源光を受ける。そして曲線形状(円弧形状)のライトガイドLGの内周側から外周側へと向かう方向に照射方向が設定された照射光LT1、LT2を出射する。即ち、ライトガイドLGの外周側から出射される光源光の方向を、ライトガイドLGの例えば法線方向(半径方向)に沿った照射方向に設定(規制)する。これにより、ライトガイドLGの内周側から外周側に向かう方向に、照射光LT1、LT2が放射状に出射されるようになる。
【0024】
このような照射光LT1、LT2の照射方向の設定は、照射方向設定部LEのプリズムシートPSやルーバーフィルムLFなどにより実現される。例えばプリズムシートPSは、ライトガイドLGの外周側から低視角で出射される光源光の方向を、法線方向側に立ち上げて、出光特性のピークが法線方向になるように設定する。またルーバーフィルムLFは、法線方向以外の方向の光(低視角光)を遮光(カット)する。
【0025】
このように本実施形態の照射部EUによれば、ライトガイドLGの両端に光源部LS1、LS2を設け、これらの光源部LS1、LS2を交互に点灯させることで、2つの照射光強度分布を形成することができる。すなわちライトガイドLGの一端側の強度が高くなる照射光強度分布LID1と、ライトガイドLGの他端側の強度が高くなる照射光強度分布LID2を交互に形成することができる。
【0026】
このような照射光強度分布LID1、LID2を形成し、これらの強度分布の照射光による対象物の反射光を受光することで、環境光などの外乱光の影響を最小限に抑えた、より精度の高い対象物の検出が可能になる。即ち、外乱光に含まれる赤外成分を相殺することが可能になり、この赤外成分が対象物の検出に及ぼす悪影響を最小限に抑えることが可能になる。
【0027】
<光学式位置検出装置による座標検出手法>
図7(A)、図5(B)は、本実施形態に係るペン型入力機器1に利用可能な光学式位置検出装置100による、座標情報検出の手法を説明する図である。
図7(A)のE1は、図4の照射光強度分布LID1において、照射光LT1の照射方向の角度と、その角度での照射光LT1の強度との関係を示す図である。図7(A)のE1では、照射方向が図7(B)のDD1の方向(左方向)である場合に強度が最も高くなる。一方、DD3の方向(右方向)である場合に強度が最も低くなり、DD2の方向ではその中間の強度になる。具体的には方向DD1から方向DD3への角度変化に対して照射光の強度は単調減少しており、例えばリニア(直線的)に変化している。なお図7(B)では、ライトガイドLGの円弧形状の中心位置が、照射部EUの配置位置PEになっている。
【0028】
また図7(A)のE2は、図6の照射光強度分布LID2において、照射光LT2の照射方向の角度と、その角度での照射光LT2の強度との関係を示す図である。図7(A)のE2では、照射方向が図7(B)のDD3の方向である場合に強度が最も高くなる。一方、DD1の方向である場合に強度が最も低くなり、DD2の方向ではその中間の強度になる。具体的には方向DD3から方向DD1への角度変化に対して照射光の強度は単調減少しており、例えばリニアに変化している。なお図7(A)では照射方向の角度と強度の関係はリニアな関係になっているが、本実施形態はこれに限定されず、例えば双曲線の関係等であってもよい。
【0029】
そして図7(B)に示すように、角度φの方向DDBに筆記用具OBが存在したとする。すると、光源部LS1が発光することで照射光強度分布LID1を形成した場合(E1の場合)には、図7(A)に示すように、DDB(角度φ)の方向に存在する筆記用具OBの位置での強度はINTaになる。一方、光源部LS2が発光することで照射光強度分布LID2を形成した場合(E2の場合)には、DDBの方向に存在する筆記用具OBの位置での強度はINTbになる。
【0030】
従って、これらの強度INTa、INTbの関係を求めることで、筆記用具OBの位置する方向DDB(角度φ)を特定できる。そして例えば後述する図8(A)、図8(B)の手法により光学式位置検出装置の配置位置PEからの筆記用具OBの距離を求めれば、求められた距離と方向DDBとに基づいて筆記用具OBの位置を特定できる。或いは、後述する図9に示すように、照射部EUとして2個の照射ユニットEU1、EU2を設け、EU1、EU2の各照射ユニットに対する筆記用具OBの方向DDB1(φ1)、DDB2(φ2)を求めれば、これらの方向DDB1、DDB2と照射ユニットEU1、EU2間の距離DSとにより、筆記用具OBの位置を特定できる。
【0031】
このような強度INTa、INTbの関係を求めるために、本実施形態では、受光部RUが、照射光強度分布LID1を形成した際の筆記用具OBの反射光(第1の反射光)を受光する。この時の反射光の検出受光量をGaとした場合に、このGaが強度INTaに対応するようになる。また受光部RUが、照射光強度分布LID2を形成した際の筆記用具OBの反射光(第2の反射光)を受光する。この時の反射光の検出受光量をGbとした場合に、このGbが強度INTbに対応するようになる。従って、検出受光量GaとGbの関係が求まれば、強度INTa、INTbの関係が求まり、筆記用具OBの位置する方向DDBを求めることができる。
【0032】
例えば光源部LS1の制御量(例えば電流量)、変換係数、放出光量を、各々、Ia、k、Eaとする。また光源部LS2の制御量(電流量)、変換係数、放出光量を、各々、Ib、k、Ebとする。すると下式(1)、(2)が成立する。
Ea=k・Ia (1)
Eb=k・Ib (2)
【0033】
また光源部LS1からの光源光(第1の光源光)の減衰係数をfaとし、この光源光に対応する反射光(第1の反射光)の検出受光量をGaとする。また光源部LS2からの光源光(第2の光源光)の減衰係数をfbとし、この光源光に対応する反射光(第2の反射光)の検出受光量をGbとする。すると下式(3)、(4)が成立する。
Ga=fa・Ea=fa・k・Ia (3)
Gb=fb・Eb=fb・k・Ib (4)
従って、検出受光量Ga、Gbの比は下式(5)のように表せる。
Ga/Gb=(fa/fb)・(Ia/Ib) (5)
【0034】
ここでGa/Gbは、受光部RUでの受光結果から特定することができ、Ia/Ibは、照射部EUの制御量から特定することができる。そして図5(A)の強度INTa、INTbと減衰係数fa、fbとは一意の関係にある。例えば減衰係数fa、fbが小さな値となり、減衰量が大きい場合は、強度INTa、INTbが小さいことを意味する。一方、減衰係数fa、fbが大きな値となり、減衰量が小さい場合は、強度INTa、INTbが大きいことを意味する。従って、上式(5)から減衰率の比fa/fbを求めることで、対象物の方向、位置等を求めることが可能になる。
【0035】
より具体的には、一方の制御量IaをImに固定し、検出受光量の比Ga/Gbが1になるように、他方の制御量Ibを制御する。例えば光源部LS1、LS2を逆相で交互に点灯させる制御を行い、検出受光量の波形を解析し、検出波形が観測されなくなるように(Ga/Gb=1になるように)、他方の制御量Ibを制御する。そして、この時の他方の制御量Ib=Im・(fa/fb)から、減衰係数の比fa/fbを求めて、対象物の方向、位置等を求める。
【0036】
また下式(6)、(7)のように、Ga/Gb=1になると共に制御量IaとIbの和が一定になるように制御してもよい。
Ga/Gb=1 (6)
Im=Ia+Ib (7)
上式(6)、(7)を上式(5)に代入すると下式(8)が成立する。
Ga/Gb=1=(fa/fb)・(Ia/Ib)
=(fa/fb)・{(Im−Ib)/Ib} (8)
上式(8)より、Ibは下式(9)のように表される。
Ib={fa/(fa+fb)}・Im (9)
ここでα=fa/(fa+fb)とおくと、上式(9)は下式(10)のように表され、減衰係数の比fa/fbは、αを用いて下式(11)のように表される。
Ib=α・Im (10)
fa/fb=α/(1−α) (11)
【0037】
従って、Ga/Gb=1になると共にIaとIbの和が一定値Imになるように制御すれば、そのときのIb、Imから上式(10)によりαを求め、求められたαを上式(11)に代入することで、減衰係数の比fa/fbを求めることができる。これにより、対象物の方向、位置等を求めることが可能になる。そしてGa/Gb=1になると共にIaとIbの和が一定になるように制御することで、外乱光の影響等を相殺することが可能になり、検出精度の向上を図れる。
【0038】
次に本実施形態の光学式検出システムを用いて対象物の座標情報を検出する手法の一例について説明する。図8(A)は、光源部LS1、LS2の発光制御についての信号波形例である。信号SLS1は、光源部LS1の発光制御信号であり、信号SLS2は、光源部LS2の発光制御信号であり、これらの信号SLS1、SLS2は逆相の信号になっている。また信号SRCは受光信号である。
例えば光源部LS1は、信号SLS1がHレベルの場合に点灯(発光)し、Lレベルの場合に消灯する。また光源部LS2は、信号SLS2がHレベルの場合に点灯(発光)し、Lレベルの場合に消灯する。従って図8(A)の第1の期間T1では、光源部LS1と光源部LS2が交互に点灯するようになる。即ち光源部LS1が点灯している期間では、光源部LS2は消灯する。これにより図6に示すような照射光強度分布LID1が形成される。一方、光源部LS2が点灯している期間では、光源部LS1は消灯する。これにより図6に示すような照射光強度分布LID2が形成される。
【0039】
このように検出部200は、第1の期間T1において、光源部LS1と光源部LS2を交互に発光(点灯)させる制御を行う。そしてこの第1の期間T1において、光学式位置検出装置(照射部)から見た対象物の位置する方向が検出される。具体的には、例えば上述した式(6)、(7)のようにGa/Gb=1になると共に制御量IaとIbの和が一定になるような発光制御を、第1の期間T1において行う。そして図7(B)に示すように筆記用具OBの位置する方向DDBを求める。例えば上式(10)、(11)から減衰係数の比fa/fbを求め、図7(A)、図7(B)で説明した手法により筆記用具OBの位置する方向DDBを求める。
【0040】
そして第1の期間T1に続く第2の期間T2では、受光部RUでの受光結果に基づいて筆記用具OBまでの距離(方向DDBに沿った方向での距離)を検出する。そして、検出された距離と、筆記用具OBの方向DDBとに基づいて、対象物の位置を検出する。即ち図7(B)において、光学式位置検出装置の配置位置PEから筆記用具OBまでの距離と、筆記用具OBの位置する方向DDBを求めれば、筆記用具OBのX、Y座標位置を特定できる。このように、光源の点灯タイミングと受光タイミングの時間のずれから距離を求め、これと角度結果を併せることで、筆記用具OBの位置を特定できる。
具体的には図8(A)では、発光制御信号SLS1、SLS2による光源部LS1、LS2の発光タイミングから、受光信号SRCがアクティブになるタイミング(反射光を受光したタイミング)までの時間Δtを検出する。即ち、光源部LS1、LS2からの光が筆記用具OBに反射されて受光部RUで受光されるまでの時間Δtを検出する。この時間Δtを検出することで、光の速度は既知であるため、筆記用具OBまでの距離を検出できる。即ち、光の到達時間のずれ幅(時間)を測定し、光の速度から距離を求める。
【0041】
なお、光の速度はかなり速いため、電気信号だけでは単純な差分を求めて時間Δtを検出することが難しいという問題もある。このような問題を解決するためには、図8(B)に示すように発光制御信号の変調を行うことが望ましい。ここで図8(B)は、制御信号SLS1、SLS2の振幅により光の強度(電流量)を模式的に表している模式的な信号波形例である。
具体的には図8(B)では、例えば公知の連続波変調のTOF(Time Of Flight)方式で距離を検出する。この連続波変調TOF方式では、一定周期の連続波で強度変調した連続光を用いる。そして、強度変調された光を照射すると共に、反射光を、変調周期よりも短い時間間隔で複数回受光することで、反射光の波形を復調し、照射光と反射光との位相差を求めることで、距離を検出する。なお図8(B)において制御信号SLS1、SLS2のいずれか一方に対応する光のみを強度変調してもよい。また図8(B)のようなクロック波形ではなく、連続的な三角波やSin波で変調した波形であってもよい。また、連続変調した光としてパルス光を用いるパルス変調のTOF方式で、距離を検出してもよい。距離検出手法の詳細については例えば特開2009−8537号などに開示されている。
【0042】
図9に、本実施形態の照射部EUの変形例を示す。図9では、照射部EUとして第1、第2の照射ユニットEU1、EU2が設けられる。これらの第1、第2の照射ユニットEU1、EU2は、筆記用具OBの検出エリアRDETの面に沿った方向において所与の距離DSだけ離れて配置される。即ち図1のX軸方向に沿って距離DSだけ離れて配置される。
【0043】
第1の照射ユニットEU1は、照射方向に応じて強度が異なる第1の照射光を放射状に出射する。第2の照射ユニットEU2は、照射方向に応じて強度が異なる第2の照射光を放射状に出射する。受光部RUは、第1の照射ユニットEU1からの第1の照射光が筆記用具OBに反射されることによる第1の反射光と、第2の照射ユニットEU2からの第2の照射光が筆記用具OBに反射されることによる第2の反射光を受光する。そして検出部200は、受光部RUでの受光結果に基づいて、筆記用具OBの位置POBを検出する。
具体的には検出部200は、第1の反射光の受光結果に基づいて、第1の照射ユニットEU1に対する筆記用具OBの方向を第1の方向DDB1(角度φ1)として検出する。また第2の反射光の受光結果に基づいて、第2の照射ユニットEU2に対する筆記用具OBの方向を第2の方向DDB2(角度φ2)として検出する。そして検出された第1の方向DDB1(φ1)及び第2の方向DDB2(φ2)と、第1、第2の照射ユニットEU1、EU2の間の距離DSとに基づいて、筆記用具OBの位置POBを求める。
【0044】
図9の変形例によれば、図8(A)、図8(B)のように光学式位置検出装置と筆記用具OBとの距離を求めなくても、筆記用具OBの位置POBを検出できるようになる。
【0045】
<ペン型入力機器の3次元での位置情報の取得>
次に、ペン型入力機器1の3次元での位置情報を取得する手法について説明する。
本実施形態で用いられる筆記用具の例を図10に示す。尚、筆記用具の柄の部分に設けられる反射部の拡大図も示す。
【0046】
筆記用具は、図10に示したように、長手方向において反射率が異なる反射部材(第1の反射部RE1)と、長手方向に沿った軸の軸周りの回転方向において反射率が異なる反射部材(第2の反射部RE2)とが設けられる。長手方向に設けられた第1の反射部RE1での反射光に基づいて、長手方向における移動量(押し込み量)を求め、回転方向に設けられた第2の反射部RE2での反射光に基づいて、回転方向における回転量を求める。
【0047】
また、長手方向における移動量を検出するための構造については複数の手法が考えられる。例えば、図11に示すように筆記用具を第1の部分と第2の部分に分け、第1の部分と第2の部分をバネのような伸縮可能な素材で結ぶ手法が考えられる。このようにしても、バネが縮むことにより、ペン先が対象面に触れている状態から、さらに筆記用具を対象面方向に押し込むことが可能になるため、長手方向における移動量を求められる。さらには、上述のような変形可能な素材やバネ機構を用いない筆記用具であってもよい。その場合には例えば、ペン先を対象面から浮かせた状態でも文字等を入力できるようにする。例えば図12に示すように、対象面からある程度のZ座標範囲を入力範囲と規定して、入力範囲に筆記用具が存在する場合に入力を行う。そして、その際の筆記用具のZ座標情報(例えばペン先部分のZ座標情報)を求め、その座標情報の大小から長手方向における移動量を求めればよい。
【0048】
<受光ユニットの構成例>
次に、光学式位置検出装置100の受光ユニットの構成例について述べる。なお、ここでは図13に示したような検出部200内の受光部RUに含まれる受光ユニットとして説明するが、詳細には、図14に示したような検出部200に含まれる第1の検出部210及び第2の検出部220等のことである。第1の検出部210は、第1の反射部RE1からの反射光を検出し、第2の検出部220は、第2の反射部RE2からの反射光を検出する。また、第1の検出部210は図13に示したように、第1部分用検出部211及び第2部分用検出部212等を含んでもよい。
【0049】
上述の光学式位置検出装置100の説明においては、受光ユニットは1つであるものとしていたが、本実施形態においては、受光ユニットは複数用いられるものとする。なお、上述したように、本実施形態で用いられる受光ユニットは、位置検出精度向上のため、受光する範囲(ここではZ座標範囲)が狭く限定されるものであることを前提としている。
【0050】
受光ユニットの構成例を図15(A)に示す。本実施形態においては、Z座標軸において異なる位置に複数の受光ユニットを設ける。ここでは特に3つの受光ユニットを設ける例について説明する。Z座標軸において異なる位置に設けられる受光ユニットのうち、長手方向における移動量を求めるために必要なものは、長手方向に設けられた第1の反射部RE1からの反射光を受光する受光ユニット1つである。また、回転方向での回転量を求めるために必要なものは、回転方向に設けられた第2の反射部RE2からの反射光を受光する受光ユニット1つである。さらに筆記用具の傾き(及びポインティング位置)を求める際には、第1の反射部RE1、第2の反射部RE2どちらからの反射光でもよいから異なる2点からの反射光を受光する2つの受光ユニットが必要となる。よって、傾きを求める際の2つの受光ユニットのうち、一方を長手方向での移動量情報を求める受光ユニットと兼用し、他方を回転方向での回転量情報を求める受光ユニットと兼用するとすれば、長手方向での移動量情報、回転方向での回転量情報及び傾きを求める際には合計2つの受光ユニットがあればよいことになる。
【0051】
しかし、図10に示したように、回転量検出用の第2の反射部RE2は、第1の反射部RE1と区別するために、長手方向において狭い領域に配置されている。つまり、筆記用具を対象面20に対して立てて使用するケースが想定されることに鑑みれば、長手方向とはZ軸方向に対応する方向になるため、回転量検出用の第2の反射部RE1は、Z座標において狭い範囲に配置されることになる。筆記用具の構成例において説明したように、長手方向において筆記用具はある程度移動することが想定されているため、筆記用具の長手方向への移動(バネ機構の伸縮を含む)に伴って、第2の反射部RE2からの反射光が受光ユニットで受光できなくなる可能性がある。
【0052】
そこで本実施形態では、Z座標軸において異なる位置に3つの受光ユニットを設ける。そして、第1の受光ユニットは第1の反射部RE1からの反射光を受光するものとする。また、第2の受光ユニット及び第3の受光ユニットは、筆記用具の長手方向での移動量を考慮した位置に設けられ、第2の受光ユニットと第3の受光ユニットのどちらかで、第2の反射部RE2からの反射光を受光する。その際、第2の反射部RE2からの反射光を受光しない方の受光ユニットは、第1の反射部RE1からの反射光を受光する。一例を図15(A)、図15(B)に示す。図15(A)のように、押し込み量が小さい状態において、第2の反射部RE2からの反射光を受光する位置(B2)に第2の受光ユニットを設け、図15(B)のように、押し込み量が大きい状態において第2の反射部RE2からの反射光を受光する位置(D1)に第3の受光ユニットを設ける。そして、図15(A)の状態では、第1の受光ユニット(B3)及び第3の受光ユニット(B1)で、第1の反射部RE1からの反射光を受光し、長手方向における移動量を求め、第2の受光ユニット(B2)で、第2の反射部RE2からの反射光を受光し、回転量を求める。同様に、図15(B)の状態では、第1の受光ユニット(D1)及び第2の受光ユニット(D2)で、第1の反射部RE1からの反射光を受光し、長手方向における移動量を求め、第3の受光ユニット(D1)で、第2の反射部RE2からの反射光を受光し、回転量を求める。
【0053】
ただし、受光ユニットの構成例は上述したものに限定されるわけではない。第2の反射部RE2をZ長手方向において広い範囲に設定できるのであれば、2つの受光ユニットで十分である。また、長手方向における移動量及び回転量のどちらか一方を求めるのであれば、2つの受光ユニットを設ければ足りる。ここで、2つとしているのは傾き情報の取得を前提としているためであり、筆記用具の傾きも必要ないとなれば、1つの受光ユニットを設けるだけでもよい。
【0054】
<入力データの取得手法>
次に入力用データの取得手法について説明する。
まず、入力位置の基準位置を設定するためのキャリブレーションを行う必要がある。ここでは具体例として、筆記用具を対象面方向に対して完全に押し込んだ時を基準位置とする。
具体的には、筆記用具を対象面に対して完全に押し込んだ時の各受光ユニットにおける受光量に基づいて、3つの反射率情報をキャリブレーション情報として取得する。
次に、各受光部においてX座標情報及びY座標情報を取得する。座標情報の取得手法については、光学式位置検出装置の説明において上述したとおりである。3つの受光ユニットを用いる例においては、第1の受光ユニットにおいて座標情報(X1,Y1)を取得し、第2の受光ユニットにおいて座標情報(X2,Y2)を取得し、第3の受光ユニットにおいて座標情報(X3,Y3)を取得する。そして、第1の受光ユニットが設けられているZ座標位置がZ1であり、且つ、受光ユニットはZ座標において狭い範囲の光を受光することから、第1の受光ユニットからの座標情報として、(X1,Y1,Z1)という3次元情報を取得する。同様に、第2の受光ユニットから(X2,Y2,Z2)を取得し、第3の受光ユニットから(X3,Y3,Z3)を取得する。これにより、筆記用具の傾きがわかるため(ただし、筆記用具は直線的な棒状のものとしている)、筆記用具と対象面(描画面)との接触位置を求めることができ、接触位置はそのまま署名位置として用いることが可能である。
【0055】
<反射率情報の取得>
3つの3次元座標情報を取得したとしても、筆記用具の長手方向における移動量や回転方向における回転量を求めることはできない。なぜなら、上述の3次元座標情報からは、3点を通る位置に筆記用具が存在することがわかるだけであり、図16(A)の状態なのか、図16(B)の状態なのかを判別できないからである。
【0056】
そのため、本実施形態においては、筆記用具に設けられた第1、第2の反射部の反射率情報をあわせて取得する。第1の反射部RE1は、上述したように、筆記用具の長手方向においてグラデーションを描くように反射率が変化する。そのため、反射率情報(具体的には受光ユニットにおける電流値等)を用いることで、受光ユニットで検出した情報が、筆記用具のどの部分に対応するものかを判定することができる。例えば、筆記用具の端部からs1[cm]のポイントが(X1,Y1,Z1)に存在し、かつ、s2[cm]のポイントが(X2,Y2,Z2)に存在するということがわかれば、筆記用具の3次元位置を詳細に求めることができる。同様に、第2の反射部RE2は、長手方向に沿った軸の軸周りでの回転方向においてグラデーションを描くように反射率が変化する。そのため、筆記用具のどの部分が受光ユニットの方向を向いているかを求めることができる。
【0057】
なお、反射率情報により表される値(受光ユニットにおける電流値等)の絶対値をそのまま用いる手法には限定されない。むしろ、照射部EUにおける照射光の強度が変化する等の要因があった場合には、電流値は全体的に変化するため、1つの値の絶対値を用いたのでは問題が生じてしまう。そのため、2つの時点での反射率情報を取得し、その比較により位置情報(長手方向における移動量、回転量等)を求めてもよい。具体的には例えば、上述したキャリブレーション時の値を用いる手法が考えられる。キャリブレーション情報を基準として、キャリブレーション情報の値からの変化を検出する。上述の例では、完全に押し込んだ状態を基準位置としているため、キャリブレーション情報からの変化に基づいて、完全に押し込んだ状態からどれだけ移動或いは回転しているかを求めることができる。
【0058】
また、キャリブレーションを行ってから、実際の検出処理を行うまでの間に照射光強度の変化等の要因が発生するおそれもある。その場合には、ある時刻T1と、別の時刻T2での反射率情報をそれぞれ検出し、T1での反射率情報とT2での反射率情報との差を求めてもよい。この場合には、基準位置との比較ではないので、筆記用具の絶対的な位置を求めることはできないが、T1からT2の間での移動量(例えば長手方向における移動量、或いは回転方向における回転量等)を求めることが可能になる。この際、T1とT2の間隔を十分短い間隔に設定しておけば、照射光強度等の変化等による影響を抑止することができる。
【0059】
<署名認証の方法>
上述したように、ペン型入力機器1によって、3次元的ペン位置が検出されるので、その3次元的ペン位置情報に基づいて、認証因子が抽出され、署名者毎の特有のプロファイルデータが生成される。このプロファイルデータの基になる認証因子が時系列に配列されたデータの一例を図17に示す。これは、例えば、「山田浩(やまだひろし)」と署名した例とする。
【0060】
ここで、ペン先の位置検出用情報PENは、ペン型入力機器1の受光部RUが、署名者の署名時において検出した受光強度を時系列に表示した信号波形である。この信号波形を前述したX座標、Y座標の検出の計算を行うことで、ペン先であるところの筆記用具OBの先端の位置の変化を計算することができ、その結果、信号波形のa部は「山田」、信号波形のb部は「浩」と記載していることを判別することができる。
【0061】
ペン傾き情報TILは、ペン型入力機器1で計算した筆記用具OB(ペン)の傾きの変化を時系列に表示しや信号波形である。この信号レベルは、署名動作中、殆ど一定の値をしており、この署名者はペンの傾きを常に一定に保持して署名する癖があることが分かる。また、ペン速度情報VELは、ペン型入力機器1で計算した筆記用具OB(ペン)の移動量を単位時間で割った値、すなわち、ペンの速度変化を示している。信号のレベルがa部よりb部の方が低い値を示している。これにより、この署名者は「山田」という苗字を書く時よりも、「浩」という名前を書く時の方が、ペン速度をゆっくり書くという癖があることが分かる。
【0062】
また、ペン回転情報ROTは、ペン型入力機器1で計算した筆記用具OB(ペン)の回転速度を表示している。この信号レベルの変化が殆ど無いことから、ペンを殆ど回転させずに署名していることが分かる。ボールペンや万年筆の場合、ペンを殆ど回転させない場合が多いが、毛筆ペンの場合、ペンを回転させて書く場合もあり、署名認証において、ペンの回転を検出することは認証精度の改善に有益になる場合もある。
【0063】
署名の真偽認証では、図17に示す認証因子からプロファイルデータを作成し。そのプロファイルデータと基準データを比較するものである。まず、ペン先の位置検出用情報PENから筆跡画像(例えばビットマップデータ)を生成する。そして、筆跡画像の類似性を比較にし、基準データの筆跡画像と比較する。この画像データの比較は筆跡認証ソフトウェア等を用意すればよい。
【0064】
本実施例では、ペン型入力機器1は3次元位置が検出できるので、筆跡のビットマットデータを作成することができる為、上述した例では、筆記用具OB(ペン)の先端の位置を検出し、それを一旦筆跡画像に変換し、その筆跡画像の形から真偽判定を行う方法を説明した。
しかしながら、筆跡画像を作成することは必ずしも必要ではない。署名認証のみ行う場合、筆記用具OB(ペン)の位置であるX座標及びY座標を計算せずに、反射光の信号波形自体で比較することも可能である。つまり、基準データ登録時において、反射光の信号波形自体を基準データとして登録し、認証時には署名者が署名動作した時の信号波形をプロファイルデータとして、そのプロファイルデータと基準データとを比較するのである。これは、本実施例に用いるペン型入力機器1は、極めて特徴ある光の出射方法を用いているので、その出射光を筆記用具OB(ペン)で反射する光の強度レベルの信号波形は声紋のような個人特有のパターンを持っていることになり、この個人特有のパターンを直接、プロファイルデータとして利用することが可能なために実現できる。
【符号の説明】
【0065】
1 ペン型入力機器、2 認証因子抽出・生成部、3 基準データ登録部、
4 データベース、5 認証部、
20 対象面、100 光学式位置検出装置、200 検出部、210 検出部、
211 第1部分用検出部、212 第2部分用検出部、220 検出部、
300 処理部、EU 照射部、LE 照射方向設定部、LF ルーバーフィルム、
LG ライトガイド、OB 対象物、PD 受光ユニット、
PD1 第1の受光ユニット、PD2 第2の受光ユニット、
PD3 第3の受光ユニット、PHD 受光素子、PS プリズムシート、
PS 光学シート、PWB 配線基板、RE1 第1の反射部、RE2 第2の反射部、
RS 反射シート、RU 受光部、SLT スリット、
PEN 位置検出用情報。
【特許請求の範囲】
【請求項1】
手書き用の筆記用具と、
前記筆記用具に照射光を出射する照射部と、
前記照射光が前記筆記用具により反射する反射光を検出する検出部と、
前記検出部での検出結果に基づいて処理を行う処理部と、
特定の情報を記憶する記憶部と、
前記処理部で処理された情報と前記特定の情報とを照合する照合部と、
を含み、
前記筆記用具は、前記筆記用具の長手方向において反射率の異なる第1の反射部、及び前記長手方向に沿った軸の軸周りでの回転方向において反射率の異なる第2の反射部の少なくとも一方を有し、
前記検出部は、前記第1の反射部及び前記第2の反射部の少なくとも一方からの反射光を検出し、
前記処理部は、前記検出部での検出結果に基づいて、前記第1の反射部の前記長手方向での移動量情報及び前記第2の反射部の前記回転方向での回転量情報の少なくとも一方を求めることを特徴とする署名認証システム。
【請求項2】
前記第1の反射部は、前記筆記用具の前記長手方向において徐々に反射率が変化し、
前記第2の反射部は、前記長手方向に沿った軸の軸周りでの前記回転方向において徐々に反射率が変化することを特徴とする請求項1に記載の署名認証システム。
【請求項3】
前記処理部は、前記第1の反射部での反射率の検出結果に基づいて、前記筆記用具の移動軌跡を求めることを特徴とする請求項1または2に記載の署名認証システム。
【請求項1】
手書き用の筆記用具と、
前記筆記用具に照射光を出射する照射部と、
前記照射光が前記筆記用具により反射する反射光を検出する検出部と、
前記検出部での検出結果に基づいて処理を行う処理部と、
特定の情報を記憶する記憶部と、
前記処理部で処理された情報と前記特定の情報とを照合する照合部と、
を含み、
前記筆記用具は、前記筆記用具の長手方向において反射率の異なる第1の反射部、及び前記長手方向に沿った軸の軸周りでの回転方向において反射率の異なる第2の反射部の少なくとも一方を有し、
前記検出部は、前記第1の反射部及び前記第2の反射部の少なくとも一方からの反射光を検出し、
前記処理部は、前記検出部での検出結果に基づいて、前記第1の反射部の前記長手方向での移動量情報及び前記第2の反射部の前記回転方向での回転量情報の少なくとも一方を求めることを特徴とする署名認証システム。
【請求項2】
前記第1の反射部は、前記筆記用具の前記長手方向において徐々に反射率が変化し、
前記第2の反射部は、前記長手方向に沿った軸の軸周りでの前記回転方向において徐々に反射率が変化することを特徴とする請求項1に記載の署名認証システム。
【請求項3】
前記処理部は、前記第1の反射部での反射率の検出結果に基づいて、前記筆記用具の移動軌跡を求めることを特徴とする請求項1または2に記載の署名認証システム。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図10】
【公開番号】特開2012−220972(P2012−220972A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−82504(P2011−82504)
【出願日】平成23年4月4日(2011.4.4)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月4日(2011.4.4)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]