
重心移動装置と重心移動方法
【課題】 重心移動を簡単な構成で容易に行えるようにして、球体の転動等を容易に可能とする。
【解決手段】球状の殻体11の内部に、流動性物質である磁性流体15を設ける。球状殻体11の内面には、電磁石21〜26を均等に配置する。電磁石21〜26で発生させる磁力を制御して、磁性流体15を移動させることにより、重心を所望の位置に移動できるようにする。磁性流体15を移動させるだけで重心を移動できることから、構成が簡単となる。また、重心の移動も容易である。さらに、重心を所望の位置に移動させることで、所望の姿勢とすることができる。また、所望の位置への重心の移動を繰り返し行うものとすれば、球体を転動させることも簡単な構成で容易に実現できる。
【解決手段】球状の殻体11の内部に、流動性物質である磁性流体15を設ける。球状殻体11の内面には、電磁石21〜26を均等に配置する。電磁石21〜26で発生させる磁力を制御して、磁性流体15を移動させることにより、重心を所望の位置に移動できるようにする。磁性流体15を移動させるだけで重心を移動できることから、構成が簡単となる。また、重心の移動も容易である。さらに、重心を所望の位置に移動させることで、所望の姿勢とすることができる。また、所望の位置への重心の移動を繰り返し行うものとすれば、球体を転動させることも簡単な構成で容易に実現できる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、重心移動装置と重心移動方法に関する。詳しくは、球状の殻体内または接地面が曲面とされている殻体内に流動性物質を設け、該流動性物質の流動を制御して、重心を所望の位置に移動させることにより、姿勢の変更や球体の移動を容易に行えるようにするものである。
【背景技術】
【0002】
従来、所望の方向へ移動自在となる球体移動装置として、特許文献1の球体移動装置では、車輪部を球体内部で動作させることにより、球体を移動させることが行われている。また、特許文献2の球殻体移動装置は、球体の内部に走行体を設けて、この走行体を移動させることにより、球体を転動させることが行われている。
【0003】
【特許文献1】特開平9−254838号公報
【特許文献2】特開平11−114234号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、球体内部に車輪部を設ける構成では、球体が所望の方向に移動するように、車輪部を持った駆動装置を球体内で移動させる必要がある。このように、駆動装置を球体内で移動させるためには、特殊な車輪構造や複数の車輪を持つなど複雑な構造が必要となってしまう。
【0005】
また、球体内に設けた走行体を移動させる場合、球体内に設けた走行体が転倒しないように、転倒防止手段を設けなければならないため、構造が複雑となる。
【0006】
そこで、この発明では、重心移動を簡単な構成で容易に行えるようにして、球体の転動等を可能とする重心移動装置と重心移動方法を提供するものである。
【課題を解決するための手段】
【0007】
この発明の第1の側面は、
球体または球体の一部の曲面を持つ形状で、球体面または前記曲面を接地面とする殻体と、
前記殻体内に設けられた流動性物質と、
前記殻体内に設けられて、前記流動性物質を移動させる流動性物質駆動部と、
前記殻体内に設けられて、前記流動性物質駆動部を制御して、前記流動性物質を移動させることにより所望の位置に重心を移動させる移動制御部と
を備える重心移動装置にある。
【0008】
また、この発明の第2の側面は、
球体または球体の一部の曲面を持つ形状で球体面または前記曲面を接地面とする殻体において、前記殻体の内部に設けられている流動性物質を前記殻体の内部に設けられている流動性物質駆動部によって移動させるステップと、
前記殻体の内部に設けられている移動制御部によって、前記流動性物質駆動部を制御して、前記流動性物質を移動させることにより所望の位置に重心を移動させるステップとを具備する重心移動方法にある。
【0009】
この発明においては、球体または球体の一部の曲面を持つ形状で、球体面または前記曲面を接地面とする殻体の内部に、流動性物質例えば磁性流体が設けられる。殻体内面には複数の磁石が均等に配置されており、磁石駆動部によって磁力が制御される。外部から移動位置を示す情報が供給されたとき、移動制御部は、現在位置と移動位置から移動位置の方向および移動位置までの距離を判別して、判別結果に応じて磁性流体の移動に用いる磁石と磁力を決定して、該決定に基づき前記磁石駆動部で前記磁石を駆動させる。また、移動制御部は、現在位置から移動位置までの距離が所定距離よりも長いとき、所定距離に応じて磁石と磁力を決定して前記磁性流体を移動させる処理を繰り返すことで、所定距離単位で移動を行う。また、光や音で移動指示が行われたとき、光の方向や音の方向を判別して、判別結果に応じて磁性流体の移動に用いる磁石と磁力が決定される。さらに、殻体の内部には殻体内面を支持する支柱が設けられる。また、重心を移動させる際に、複数の磁石における所定の磁石で磁力を発生させて磁性流体の一部を吸着させておくことで、慣性モーメントの偏りが補正される。
【発明の効果】
【0010】
この発明によれば、接地面が曲面とされている殻体内に流動性物質が設けられて、この流動性物質が駆動部によって殻体内で流動される。また、移動制御部によって、流動性物質の流動が制御されて、重心が所望の位置に移動される。このため、複雑な移動機構を必要とせず、任意の方向に移動することが可能となる。また、姿勢を任意の姿勢とすることが容易に可能となる。
【発明を実施するための最良の形態】
【0011】
以下、発明を実施するための最良の形態について説明する。この発明は、球体または球体の一部の曲面を持つ形状で、球体面または前記曲面を接地面とする殻体内に流動性物質例えば磁性流体を設けて、この磁性流体を移動させることによって、重心移動を行うものである。なお、説明は以下の順序で行うものとする。また、第1〜6の実施の形態は、重心移動装置を球体移動装置に適用した場合、第7の実施の形態は、重心移動装置を姿勢制御装置に適用した場合ついて説明している。
【0012】
1.第1の実施の形態(球体移動装置と接地面との間で滑りを生じない場合)
2.第2の実施の形態(球体移動装置と接地面との間で滑りを生じる場合)
3.第3の実施の形態(光検出情報をもとに球体移動装置を移動させる場合)
4.第4の実施の形態(音検出情報をもとに球体移動装置を移動させる場合)
5.第5の実施の形態(球状殻体の中心を通る軸に対する慣性モーメントに偏りを生じる場合)
6.第6の実施の形態(球状殻体内に支柱を設けた場合)
7.第7の実施の形態(姿勢制御装置について)
8.第8の実施の形態(電磁石に代えて永久磁石を用いた場合)
【0013】
<1.第1の実施の形態>
[球体移動装置の構成]
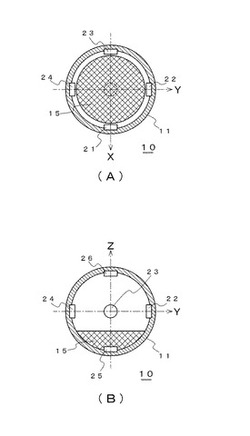
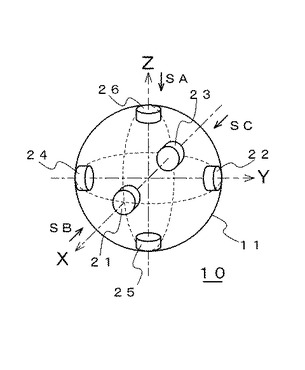
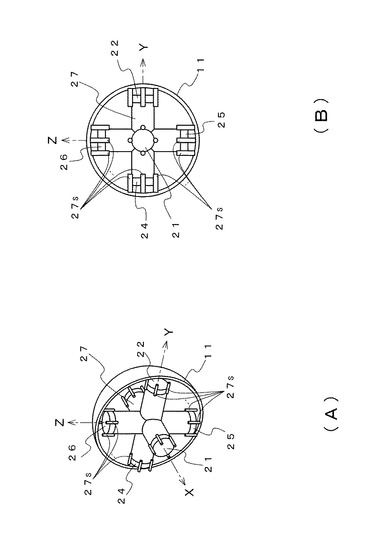
図1は、重心移動装置を適用した球体移動装置の斜視図である。また、図2は、この球体移動装置の断面概略図である。なお、図2の(A)は図1における位置「Z=0」での断面を上面側からみたとき(図1の矢印SA方向からみたとき)の図、図2の(B)は、図1における位置「X=0」での断面を前面側からみたとき(図1の矢印SB方向からみたとき)の図をそれぞれ示している。
【0014】
球体移動装置10は、球状殻体11を用いて構成する。球状殻体11の内面には、複数の電磁石を固定して配置する。複数の電磁石は、球状殻体11の中心を通る軸まわりの回転運動に対して偏りがなく、球状殻体11を任意の方向に容易に回転させることができるように、球状殻体11の内面に均等に配置する。例えば3軸(X軸,Y軸,Z軸)の交点と球状殻体11の中心を一致させたとき、3軸と球状殻体11が交わる6つの点に、それぞれ等しい重さとされている電磁石21〜26を配置する。
【0015】
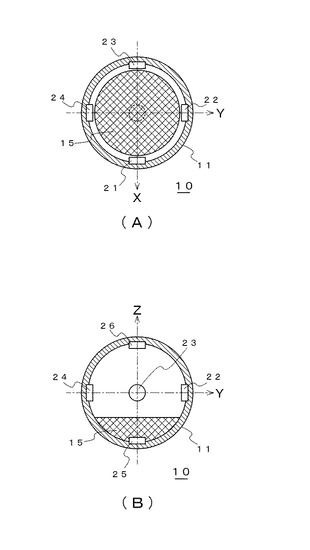
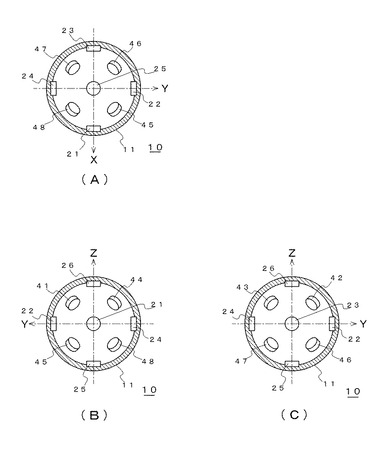
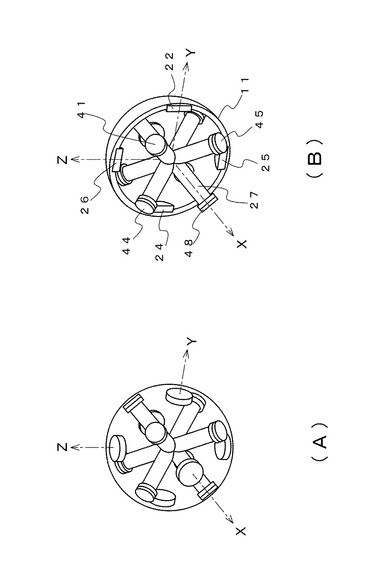
また、球状殻体11の内面には、図3に示すように、外部からの移動指令を受信する移動指令受信部41、受信された移動指令に応じて電磁石で発生させる磁力を制御する移動制御部42、移動制御部42からの制御信号に基づいて電磁石で磁力を発生させる電磁石駆動部43、各部を動作させるための電源部44〜48を固定して配置する。なお、図3の(A)は、図1における位置「Z=0」での断面を上面側からみたとき(図1の矢印SA方向)の断面概略図を示している。図3の(B)は、図1における位置「X=0」での断面を後面側からみたとき(図1の矢印SC方向からみたとき)の図を示している。また、図3の(C)は、図1における位置「X=0」での断面を前面側からみたとき(図1の矢印SB方向からみたとき)の図を示している。
【0016】
さらに、球状殻体11の内部には、図2に示すように、錘として機能する磁性流体15を設ける。この磁性流体15は、磁力によって吸着する流体である。
【0017】
球体移動装置10は、移動目標点に応じて、駆動する電磁石および電磁石の駆動電流の決定を行い、決定した駆動電流で電磁石を駆動して磁力を発生させて、球体移動装置10の重心の最下点が移動目標点の位置になるように磁性流体15を移動させる。このように、磁性流体15を移動させることで、球体移動装置10は、スムーズに転動して移動目標点に移動することになる。
【0018】
ここで、球状殻体11の中心を通る回転軸に対する慣性モーメントに大きく偏りがある場合、すなわち球体移動装置10の重心が回転軸から離れている場合、球体移動装置10の重心の位置は、球体移動装置10の転動に伴い上下方向に変動することがある。このため、球体移動装置10をスムーズに転動させるためには、球体移動装置10が転動しても球体移動装置10の重心の位置が上下方向に変動することのないように、磁性流体15の移動を複雑に制御しなければならない。例えば、球体移動装置10の重心が回転軸から離れている場合、球体移動装置10の重心が高い位置へと移動するときには転動を抑制する力が生じ、球体移動装置10の重心が低い位置へと移動する場合は転動を促進する力が生じる。したがって、転動を抑制する力や転動を促進する力が生じないように、磁性流体15の移動を複雑に制御しなければならない。
【0019】
そこで、移動指令受信部41と移動制御部42と電磁石駆動部43および電源部44〜48は、球状殻体11の中心を通る軸に対する慣性モーメントに大きな偏りがなく、球体移動装置10を任意の方向に容易に移動させることができるように配置する。例えば、移動指令受信部41と移動制御部42と電磁石駆動部43および電源部44〜48を、予め個々の電磁石21〜26と等しい重量に調整しておき、近接する3つの電磁石から等しい距離の位置にそれぞれ配置する。なお、電磁石や移動指令受信部等は、球状殻体11の内面から突出して配置してもよく、球状殻体11が厚い場合には、球状殻体11に埋設してもよい。
【0020】
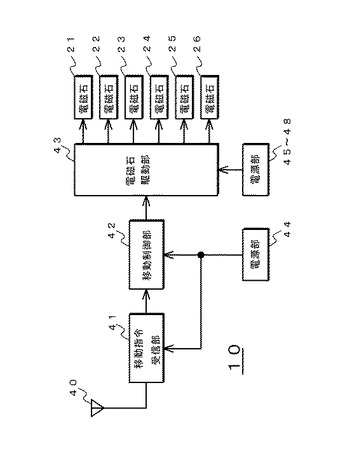
図4は、球体移動装置10の機能ブロック図を示している。アンテナ40は、移動指令を示す外部からの無線信号を受信して移動指令受信部41に供給する。移動指令受信部41は、受信した信号に基づき外部から供給された移動指令を得て移動制御部42に供給する。移動制御部42は、移動指令に基づき移動方向や移動量を決定して、決定した移動方向に移動量分だけ球体移動装置10が移動するように、各電磁石で発生させる磁力を制御するための制御信号を生成して電磁石駆動部43に供給する。電磁石駆動部43は、移動制御部42から供給された制御信号に基づき電磁石21〜26を駆動して、球体移動装置10が決定した移動方向に移動量分だけ移動するように磁性流体15を移動させる。電源部44は、移動指令受信部41と移動制御部42に対して電力供給を行う。電源部45〜48は、電磁石駆動部43に対して電力供給を行う。
【0021】
[球体移動装置と接地面との間で滑りを生じない場合の移動動作]
次に、球体移動装置10の移動動作について説明する。球体移動装置10は、移動方向の電磁石に駆動電流を供給して磁力を発生させる。このとき、磁性流体15は、発生された磁力に応じて移動して、磁力を発生した移動方向の電磁石に吸着される。このため、球体移動装置10は、磁性流体15の移動に伴い重心が移動したことから移動方向に転動して、結果として球体移動装置10が移動する。例えば図2の(A)において、電磁石21で磁力を発生して磁性流体15を吸着すれば、球体移動装置10の重心がX方向に移動して、球体移動装置10がX方向に転動する。すなわち、球体移動装置10をX方向に移動させることができる。また、任意の方向に関しては、移動方向に存在する3つの電磁石で発生される磁力を調整することで可能となる。
【0022】
球体移動装置10と接地面との間で滑りを生じない場合、電磁石21〜26の駆動結果から球体移動装置10の位置と姿勢を一意に求めることができる。図5は、球状殻体11に固定された座標系であるUVW座標系と空間座標系であるXYZ座標系の関係を示している。例えば、初期状態では、U軸とX軸、V軸とY軸、W軸とZ軸が一致しているものとする。
【0023】
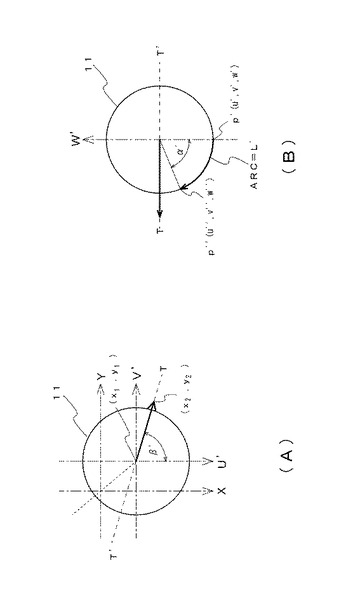
また、移動指令がたとえば移動位置(x1,y1)への移動を示しており、図6に示すように、球体移動装置10を移動指令に応じて(X,Y)=(x1,y1)の位置に移動するとき、移動制御部42は、回転角度αと移動方向角度βを定義する。なお、図6の(A)は球状殻体11の上面図を示しており、X軸に対する位置(x1,y1)の方向の角度を移動方向角度βとする。また、図6の(B)は、球状殻体11をXY平面と垂直であって移動方向となる面(XY平面に対して垂直でT−T’を通る面)で切断したときの断面図を示している。この図6の(B)に示す円弧の長さARCと位置(x1,y1)までの移動距離が一致するときの球状殻体11の回転角度を回転角度αとする。
【0024】
ここで、移動距離を「L」、球状殻体11の外側球面の半径を「r」としたとき、回転角度αは式(1)から算出できる。また、移動方向角度βは式(2)〜(5)から算出する。
【0025】
【数1】

【0026】
球状殻体11における移動前の接地点pのUVW座標系の座標は、座標(0,0,−r)である。また、球体移動装置10が(X,Y)=(x1,y1)の位置に移動したときの球状殻体11の接地点p’、すなわち移動目標点である接地点p’のUVW座標系の座標(u’,v’,w’)は、式(6)(7)で求めることができる。
【0027】
【数2】
【0028】
なお、R(α,β)は回転行列である。ここで、回転行列について説明する。例えば、Z軸まわりのθ回転をあらわす行列をRz(θ)、Y軸まわりのθ回転をあらわす行列をRy(θ)とする。式(8)は行列Rz(θ)、式(9)は行列Ry(θ)を示している。
【0029】
【数3】
【0030】
まず、Z軸周りに「−β」だけ回転して、Y軸と進行方向の回転軸を合わせる。次にY軸周りに「α」だけ回転させて(右ねじ則の逆で定義)、そしてZ軸まわりに「β」だけ回転させてもとの軸の位置に戻すと、所望の回転をしたことになる。この動作をRz,Ryを使って表記すると式(10)になる。
R(α,β)=Rz(β)・Ry(α)・Rz(−β) --(10)
【0031】
したがって、式(10)に式(8)(9)を代入すると式(11)となり、式(11)を整理すると式(7)となる。
【0032】
【数4】
【0033】
また、回転行列Rの逆行列について考えると、Z軸周りに「−β」回転、Y軸周りに「−α」回転、Z軸周りに「β」回転させることと同じであることから、回転行列Rの逆行列は式(12)で示すことができる。
R−1(α,β)=Rz(β)・Ry(−α)・Rz(−β)=R(−α,β) --(12)
【0034】
移動制御部42は、球状殻体11に固定されたUVW座標系における移動目標点を決定したことから、この移動目標点に応じて、駆動する電磁石および電磁石の駆動電流を決定する。移動制御部42は、決定された駆動電流で電磁石を電磁石駆動部43によって駆動させることにより磁力を発生させて、球体移動装置10の重心の最下点が移動目標点の位置になるように磁性流体15を移動させる。この磁性流体15の移動に伴い、球体移動装置10が転動されて、球体移動装置10は所望の移動先に移動することになる。
【0035】
また、球体移動装置10の接地点が移動目標点の位置となったのち、さらに球体移動装置10を移動させる場合には、図7で示すように、XYZ座標系の原点を(x1,y1,0)に移動させたものと等しいU’V’W’座標系を球状殻体11に固定して新たに定義する。
【0036】
なお、図7の(A)は球状殻体11の上面図を示している。また、図7の(B)は、球状殻体11をXY平面と垂直であって移動方向となる面(XY平面に対して垂直でT−T’を通る面)で切断したときの断面図を示している。
【0037】
次の移動位置(x2,y2)に移動させるとき、(x2’,y2’)=(x2−x1,y2−y1)として、上述の移動動作と同様に移動距離「L’」、回転角度α’、移動方向角度β’を定義する。このとき、球体移動装置10が位置(x2,y2)に移動したときの球状殻体11における接地点p’’、すなわち移動目標点である接地点p’’のU’V’W’座標系の座標(u’’,v’’,w’’)は、式(13)で求めることができる。
【0038】
【数5】
【0039】
ここで、U’V’W’座標系を初期のUVW座標系に変換する行列を姿勢行列Qとして定義すると、姿勢行列Qを用いて式(14)からUVW座標系での座標(u’’,v’’,w’’)を算出できる。
【0040】
【数6】
【0041】
姿勢行列Qを掛けることは、回転行列R(α,β)の逆行列を掛けることであり、上述の式(12)に示す逆行列を用いればよい。すなわち、姿勢行列Qは式(15)となる。
【0042】
Q=R−1(α,β)=R(−α,β) --(15)
移動制御部42は、球状殻体11に固定されたUVW座標系における新たな移動目標点を決定したことから、新たな移動目標点に応じて、駆動する電磁石および電磁石の駆動電流を決定する。移動制御部42は、決定された駆動電流で電磁石を電磁石駆動部43によって駆動させることにより磁力を発生させて、球体移動装置10の重心の最下点が移動目標点の位置になるように磁性流体15を移動させる。この磁性流体15の移動に伴い、球体移動装置10が転動されて、球体移動装置10は所望の移動先に移動することになる。
【0043】
また、球体移動装置10の移動に伴い、球体移動装置10の姿勢状態が回転行列R(α’,β’)だけ回転した状態となっているので、次回の移動時に用いられる姿勢行列Qを式(16)のように更新しておく。
Q=QR(−α’,β’) --(16)
【0044】
なお、上述の例では、初期状態でXYZ座標系とUVW座標系が等しいため、最初の移動である位置(x1,y1)への移動時には姿勢行列Qが単位行列であったが、初期状態で姿勢が一致しない場合は、あらかじめ姿勢の初期状態の姿勢行列Qを求めておけば、同様に処理できる。姿勢の状態は、球状殻体11上の異なる3点のXYZ座標系とUVW座標系の関係が明らかになれば、逆行列演算で求められる。
【0045】
球体移動装置10の移動において、図1に示すように電磁石を配置している場合、一度の移動動作で移動できる最大移動距離Lmaxは、球体移動装置10の球状殻体11における外側球面の半径を「r」とすると、「Lmax=πr/2」に制限される。したがって、球体移動装置10は、最大移動距離Lmax以下に設定した移動距離(以下「規定距離」という)Lsを設けて、規定距離Ls以下の移動動作を繰り返すことで、規定距離Lsよりも大きい距離の移動を行う。すなわち、現在位置から規定距離Lsの位置を途中点として、途中点までの移動動作を繰り返し、残存距離が規定距離Ls以下となったとき、移動目標点の位置となるように移動動作を行う。
【0046】
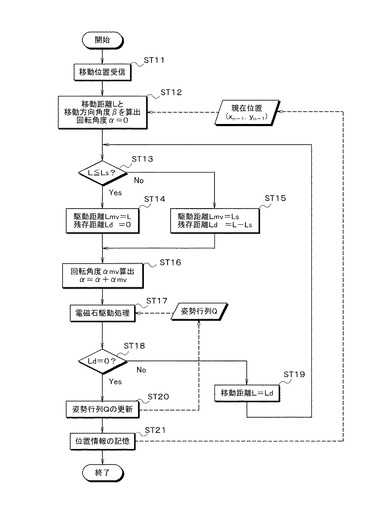
図8は、球体移動装置10おける駆動動作を示すフローチャートである。ステップST11で移動制御部42は、移動位置を受信する。移動制御部42は、移動指令受信部41で受信された移動指令が示す移動位置を判別してステップST12に進む。この移動指令は、例えば移動位置(xn,yn)を示すものとする。
【0047】
ステップST12で移動制御部42は、移動距離Lと移動方向角度βを算出する。また、移動制御部42は、回転角度αの初期化「α=0」を行う。なお、現在位置を位置(xn−1,yn−1)とした場合、移動距離Lは式(17)において「x0」を「xn−1」、「y0」を「yn−1」、「x1」を「xn」、「y1」を「yn」に置き換えれば算出できる。
【0048】
【数7】
【0049】
ステップST13で移動制御部42は、移動距離Lが規定距離Ls以下であるか否か判別する。移動制御部42は、移動距離Lが規定距離Ls以下であるときステップST14に進み、移動距離Lが規定距離Lsよりも大きいときステップST15に進む。
【0050】
ステップST14で移動制御部42は、駆動距離Lmvとして移動距離Lを設定する。また移動制御部42は、残存距離Ldを「0」としてステップST16に進む。
【0051】
ステップST15で移動制御部42は、駆動距離Lmvとして規定距離Lsを設定する。また移動制御部42は、移動距離Lから規定距離Lsを減算して残存距離LdとしてステップST16に進む。すなわち、ステップST15では途中点を設定する。
【0052】
ステップST16で移動制御部42は、駆動距離Lmv分の回転角度αmvを算出して、算出した回転角度αmvを回転角度αに加算して新たな回転角度αとしてステップST17に進む。
【0053】
ステップST17で移動制御部42は、電磁石駆動処理を行う。移動制御部42は、姿勢行列Qを用いて上述の式(14)の演算を行い、移動目標点を設定する。また、移動制御部42は、設定した移動目標点に応じて、駆動する電磁石および電磁石の駆動電流を決定する。さらに、移動制御部42は、決定された駆動電流で電磁石を駆動する駆動動作を電磁石駆動部43で行わせて、電磁石で発生された磁力によって、球体移動装置10の重心の最下点が移動目標点(または途中点)の位置になるように磁性流体15を移動させてステップST18に進む。
【0054】
ステップST18で移動制御部42は、残存距離Ldが「0」であるか否かを判別する。移動制御部42は、残存距離Ldが「0」でないときステップST19に進み、残存距離Ldが「0」であるときステップST20に進む。
【0055】
ステップST19で移動制御部42は、残存距離Ldを新たに移動距離Lに設定してステップST13に戻る。
【0056】
ステップST20で移動制御部42は、姿勢行列Qの更新を行ってステップST21に進む。移動制御部42は、上述の式(16)に示すように姿勢行列Qを更新してステップST21に進む。
【0057】
ステップST21で移動制御部42は、位置情報を記憶する。すなわち、移動制御部42は、移動動作が完了した位置を現在位置(xn−1,yn−1)として記憶することで、次の移動指令が行われたとき、現在位置(xn−1,yn−1)を基準として移動動作を行えるようにする。
【0058】
このような処理を行うものとすれば、移動指令で示された位置までの距離が規定距離Lsよりも大きいときは、規定距離Lsで移動動作が繰り返されて、残存距離Ldが規定距離Ls以下となったとき、残存距離Ldの移動動作が行われる。したがって、一度の移動動作で移動できる規定距離Lsを超えて、球体移動装置10を移動させることができる。
【0059】
<2.第2の実施の形態>
球体移動装置と接地面との間で滑りを生じる場合、球体移動装置は、駆動距離Lmvを設定して移動を行っても、移動距離が駆動距離Lmvと異なってしまうことがある。このため、球体移動装置は、移動指示によって指示された位置までの距離や方向だけで、指示された位置に正しく移動することができない。そこで、センサを用いて球体移動装置の位置と姿勢の検出を行い、球体移動装置は、センサの検出結果を用いることで、指示された位置に正しく移動する。
【0060】
[球体移動装置の構成]
図9は、球体移動装置10aにおける現在の姿勢を検出するための姿勢検出センサ、例えば3軸加速度センサ49を設けた場合の構成を示している。なお、3軸加速度センサ49は、球体移動装置10aに固定されていれば、球体移動装置10aの内部のいずれに設置してもよい。なお、図9では、移動指令/位置情報受信部の内部に3軸加速度センサ49を設けた場合を示している。また、球体移動装置10aにおいて、3軸加速度センサ49を除く他の部分は、上述の球体移動装置10と同様に構成する。
【0061】
3軸加速度センサ49のUsVsWs座標系は、図9に示すように、球体移動装置10aのUVW座標系の原点をセンサ位置に移動した座標系とする。3軸加速度センサ49が示す重力加速度の向きは、UVW座標系における球体移動装置10aの底面を指すベクトルの方向と等しくなる。したがって、球体移動装置10aは、3軸加速度センサ49で重力加速度を検出することで、球状殻体11上における接地点のUVW座標系の座標(ub,vb,wb)を推定できる。球体移動装置10aは、3軸加速度センサ49で得られたUsVsWs座標系における加速度の値As=(au,av,aw)から重力方向単位ベクトルes=As/|As|を算出する。また、球体移動装置10aは、球状殻体11の外側球面の半径「r」と重力方向単位ベクトルesを乗算する。すなわち(ub,vb,wb)=res=(rau/|As|,rav/|As|,raw/|As|)がUVW座標系における接地点の座標になる。
【0062】
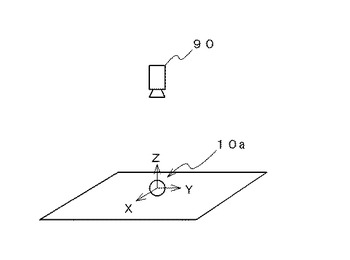
この段階では、XYZ座標系とUVW座標系の関係については一意に決定されていない。したがって、XYZ座標系における球体移動装置10aの位置を検出するため、図10に示すように、球体移動装置10aの位置検出装置として、XY平面の上方に例えば撮像装置90を設ける。撮像装置90は、XY平面の上方から球体移動装置10aを撮像して、XY平面上における球体移動装置10aの中央の座標値(xc0,yc0)を特定する。この球体移動装置10aの中央の座標と球体移動装置10aの接地点座標から、接地点とそのとき頂点の座標の2点が特定される。
【0063】
また、球体移動装置10aにおける球状殻体11の外側球面に識別マークを設けて、この識別マークの位置を用いて球体移動装置10aの姿勢を特定する。
【0064】
識別マークとしては、球体移動装置10aの内部に配置されている電磁石もしくは移動指令受信部等の位置に、例えば外側に向けて発光する複数の発光部を配置し、これらを順番に1個点灯させる処理を繰り返す。また、各発光部の位置を予め保持しておき、点灯している発光部を検出したとき、駆動されている発光部の位置を判別することで、球状殻体上における一点の位置を取得できるようにする。
【0065】
図11は、座標「V=0」の平面での断面の一部を示している。発光部である発光デバイス61は、光の放射方向が球体移動装置10bの中心(球状殻体11の中心)から外側の向きとなるようにして、球状殻体11と電磁石21と間に設ける。この発光デバイス61は、発光ダイオード(LED:light emitting diode)等を用いて構成する。また、発光デバイス61からの光が球状殻体11を透過して外部に放射されない場合、光を外部に放射するための貫通穴を球状殻体11に形成する。なお、貫通穴の穴径は、球体移動装置10aの転動が阻害されないように設定する。また、電磁石22〜26の位置にも同様に発光デバイス62〜66を設ける。各電磁石の位置に設けた発光デバイスは、ある時刻で特定の1つだけが点灯している状態となるように順次点灯駆動する。
【0066】
撮像装置90で取得できる情報は、図12に示すように、XY平面上の座標である。しかし、点が球状殻体11上の点であることを考慮すれば、球状殻体11の中央のZ座標値は±r、中央以外の点灯した一点(UVW座標系における既知の座標(up1,vp1,wp1)の点)に関して得られたXY座標を(xc1,yc1)とすると、撮像装置90で観測できる球状殻体11上の点はZ≧0であるので、中央のXY座標値(xc0,yc0)を用いて式(18)からZ座標値(zc1)を求めることができる。
【0067】
【数8】
【0068】
これにより、球状殻体11上における3点のXYZ座標系の座標値(xc0,yc0,r),(xc0,yc0,−r),(xc1,yc1,zc1)とUVW座標系の座標値(ub,vb,wb),(−ub,−vb,−wb),(up1,vp1,wp1)が得られるので、式(19)から姿勢行列Qを求めることができる。なお、姿勢行列Qを求めることができるようにするため、撮像装置90で取得する一点は、中央以外の点灯した一点とする。
【0069】
【数9】
【0070】
また、球体移動装置10aの位置は球状殻体11の中央座標であるので座標値(xc0,yc0)である。
【0071】
このようにして、現在位置と移動目標点と現在の姿勢行列Qが求められることから、球体移動装置と接地面との間で滑りを生じる場合でも、上述の滑りを生じていない場合と同様に、上述の式(7)や式(14)等を用いて球体移動装置10aを移動目標点に正しく移動させることができる。
【0072】
図13は、球体移動装置10aの機能ブロック図を示している。アンテナ40aは、外部からの移動指令を示す無線信号と撮像装置90からの球体移動装置10aの位置情報を示す無線信号を受信して移動指令/位置情報受信部41aに供給する。移動指令/位置情報受信部41aは、受信した信号に基づき外部から供給された移動指令や位置情報を移動制御部42aに供給する。
【0073】
また、移動指令/位置情報受信部41aには、発光デバイス(例えばLED)61〜66を順番に1つずつ点灯させる点滅駆動部51を接続する。点滅駆動部51は、発光デバイス61〜66を順番に1つ点灯させる。また、点滅駆動部51は、点灯している発光デバイスのUVW座標系における座標値を位置情報として移動指令/位置情報受信部41aに供給する。移動指令/位置情報受信部41aは、移動指令や位置情報を移動制御部42aに供給する。また、移動指令/位置情報受信部41aは、撮像装置で点灯した一点の座標が取得されたとき、この点灯した発光デバイスのUVW座標系における座標値を点灯情報として移動制御部42aに供給する。
【0074】
3軸加速度センサ49は、加速度検出結果を移動制御部42aに供給する。
【0075】
移動制御部42aは、球体移動装置10aの現在位置と移動指令と位置情報や点灯情報および加速度検出結果に基づき移動方向や移動量を決定して、決定した移動方向に移動量分だけ球体移動装置10を移動させるように、各電磁石で発生させる磁力を制御するための制御信号を生成して電磁石駆動部43に供給する。電磁石駆動部43は、移動制御部42から供給された制御信号に基づき電磁石21〜26を駆動して、球体移動装置10が決定した移動方向に移動量分だけ移動するように磁性流体を、電磁石21〜26で発生した磁力によって移動させる。
【0076】
発光デバイス61は電磁石21の位置に設ける。同様に、発光デバイス62〜66は電磁石22〜26の位置に設ける。発光デバイス61〜66は、点滅駆動部51からの駆動信号によって点滅動作を行い、球体移動装置10aの外部に光を放射する。
【0077】
[球体移動装置と接地面との間で滑りを生じる場合の移動動作]
図14は、球体移動装置10aおける駆動動作を示すフローチャートである。ステップST31で移動制御部42aは、移動位置を受信する。移動制御部42は、移動指令/位置情報受信部41aで受信された移動指令が示す移動位置を判別してステップST32に進む。この移動指令は、例えば移動位置(xn,yn)を示すものとする。
【0078】
ステップST32で移動制御部42aは、現在位置を受信する。移動制御部42aは、移動指令/位置情報受信部41aで受信された現在位置情報が示す現在位置を判別してステップST33に進む。この現在位置情報は、XY平面における球体移動装置10aの中央の座標値(xc0,yc0)を示すものである。
【0079】
ステップST33で移動制御部42aは、移動距離Lを算出する。移動制御部42は、球体移動装置10aの中央の座標値(xc0,yc0)と移動位置(xn,yn)から移動距離を算出してステップST34に進む。なお、移動距離Lは式(17)において「x0」を「xc0」、「y0」を「yc0」、「x1」を「xn」、「y1」を「yn」に置き換えれば算出できる。
【0080】
ステップST34で移動制御部42aは、移動距離Lが「L=0」であるか否か判別する。移動制御部42は、移動距離Lが「L=0」でないときステップST35に進む。また、移動距離Lが「L=0」であるときは、球体移動装置10aの中央の座標が移動位置となっていることから、移動制御部42aは移動動作を終了する。
【0081】
ステップST35で移動制御部42aは、点滅座標位置を受信する。移動制御部42aは、移動指令/位置情報受信部41aで受信された点滅位置情報が示す点滅座標位置を判別する。この点滅位置情報は、中央以外の点灯した一点の座標値(xc1,yc1)を示すものである。また、移動制御部42aは、点灯した一点である発光デバイスについてUVW座標系における座標値の判別も行ってステップST36に進む。
【0082】
ステップST36で移動制御部42aは、接地点の推定を行う。移動制御部42aは、3軸加速度センサ49で得られた加速度検出結果を用いて、球体移動装置10aにおける球状殻体11の接地点を推定してステップST37に進む。この推定した接地点の座標値は、UVW座標系における座標値(ub,vb,wb)とする。
【0083】
ステップST37で移動制御部42aは、姿勢行列Qの算出を行う。移動制御部42aは、球体移動装置10aの球状殻体11上における3点のXYZ座標系の座標値(xc0,yc0,r),(xc0,yc0,−r),(xc1,yc1,zc1)と、UVW座標系の座標値(ub,vb,wb),(−ub,−vb,−wb)、および点灯した一点におけるUVW座標系の座標(up1,vp1,wp1)から姿勢行列Qを算出してステップST38に進む。
【0084】
ステップST38で移動制御部42aは、移動方向角度βを算出する。移動制御部42aは、上述の式(2)〜(5)から移動方向角度βを算出してステップST39に進む。
【0085】
ステップST39で移動制御部42aは、移動距離Lが規定距離Ls以下であるか否か判別する。移動制御部42aは、移動距離Lが規定距離Ls以下であるときステップST40に進み、移動距離Lが規定距離Lsよりも大きいときステップST41に進む。
【0086】
ステップST40で移動制御部42aは、駆動距離Lmvとして移動距離Lを設定してステップST42に進む。
【0087】
ステップST41で移動制御部42aは、駆動距離Lmvとして規定距離Lsを設定してステップST42に進む。
【0088】
ステップST42で移動制御部42aは、駆動距離Lmv分の回転角度αmvを算出して、算出した回転角度αmvを回転角度αとしてステップST44に進む。
【0089】
ステップST43で移動制御部42aは、電磁石駆動処理を行う。移動制御部42aは、姿勢行列Qを用いて上述の式(14)の演算を行い移動目標点を設定する。また、移動制御部42aは、設定した移動目標点に応じて、駆動する電磁石および電磁石の駆動電流を決定する。さらに、移動制御部42aは、決定された駆動電流で電磁石を駆動する駆動動作を電磁石駆動部43で行わせて、電磁石で発生された磁力によって、球体移動装置10の重心の最下点が移動目標点(途中点)の位置になるように磁性流体15を移動させる。さらに、移動制御部42aは、電磁石の駆動制御を行ったのちステップST32に戻り、移動後の球体移動装置10aの位置である新たな現在位置情報を受信して、上述の処理を繰り返す。
【0090】
このように駆動動作を行うものとすれば、球体移動装置10aの中央の座標が移動位置となるまで、球体移動装置10aが駆動されるので、球体移動装置と接地面との間で滑りを生じる場合でも、球体移動装置10aを指示された位置に移動させることができる。
【0091】
<3.第3の実施の形態>
上述の第1および第2の実施の形態では、移動指令を示す無線信号を受信して球体移動装置の移動を行う場合について説明したが、球体移動装置の移動は、無線信号による移動指令に基づいて行う場合に限られるものではない。次に、センサの情報例えば光センサから得られた光検出情報に基づいて球体移動装置を移動させる場合について説明する。
【0092】
[球体移動装置の構成]
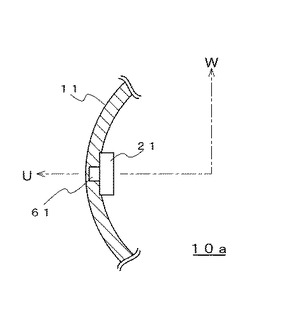
図15は、座標「V=0」の平面での断面の一部を示している。光センサ71は、外部からの照射光の強度を検出できるようにして、球状殻体11と電磁石21と間に設ける。また、外部からの光が球状殻体11を透過して光センサ71に入射されない場合、光を光センサ71に入射させるための貫通穴を球状殻体11に設ける。なお、貫通穴の穴径は、球体移動装置10aの転動が阻害されないように設定する。また、電磁石22〜26の位置にも同様に光センサ72〜76を設ける。光センサ71で検出された光強度は、強度G71とする。光センサ72〜76で検出された光強度は、強度G72〜G76とする。なお、強度G71〜76は、スカラー量である。
【0093】
ここで、球体移動装置10bの中心から光センサの取り付けられた位置に向かう方向のUVW座標系における向きを考慮すると、各光センサ71〜76で得られた強度と向きを含めたベクトルVTは、式(20)として示すことができる。
【0094】
VT=(G71−G73,G72−G74,G75−G76) --(20)
これは、UVW座標系における目標方向になるが、球体移動装置10bはZ軸方向には進めないので、ベクトルVTの接地面に対する水平成分だけを考える。
【0095】
XYZ座標系における−Z方向のベクトルは重力方向であるから、3軸加速度センサ49で得られた加速度検出結果を参照することで、UVW座標系における−Z方向を検出することが可能となる。
【0096】
図16は、球体移動装置10bにおける球状殻体11の移動方向の断面概略図を示している。ここで、3軸加速度センサ49からの加速度検出結果に基づいて判別した重力方向のベクトルを重力方向単位ベクトルesとすると、光センサ71〜76で得られた強度から求まるベクトルVTの重力方向(−Z方向)の成分は、重力方向単位ベクトルesとベクトルVTとの内積で算出できる。したがって、ベクトルVTのXY平面方向の成分を水平方向移動成分VTHとすると、水平方向移動成分VTHは式(21)から求めることができる(Z軸方向の成分VTZ=(es・VT)esを元のベクトルVTから引く)。
【0097】
VTH=VT−(es・VT)es --(21)
なお、(es・VT)は重力方向単位ベクトルesとベクトルVTとの内積であることを表している。
【0098】
さらに、水平方向移動成分VTHと、球体移動装置10bの接触点ベクトル(res)との和を進むべき方向として、この向きの球面上との交点を移動目標ベクトルVFTとすると移動目標ベクトルVFTは、式(22)から算出できる。
【0099】
【数10】
【0100】
なお、|VTH+res|はベクトル(VTH+res)の大きさを表している。
【0101】
これによりUVW座標系における、移動目標ベクトルVFTで求まり、移動目標ベクトルVFTが示す球面上の位置(目標接地点)PFTが、球体移動装置10bの最下点となるように電磁石21〜26を駆動し、磁性流体15を移動させて重心を変化させて、球体移動装置10bを転動させる。これにより、光センサ71〜76で取得した光の強度が強い方向に球体移動装置10bを移動させることができる。
【0102】
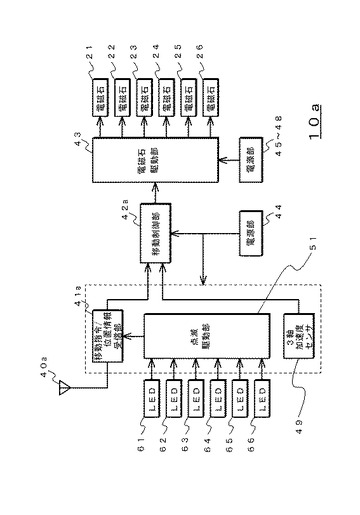
図17は、球体移動装置10bの機能ブロック図を示している。光センサ71〜76は、光の強度を検出して検出結果を、光センサ情報として移動制御部42bに供給する。また、3軸加速度センサ49は、加速度検出結果を移動制御部42bに供給する。
【0103】
移動制御部42bは、光センサ71〜76からの光センサ情報と3軸加速度センサ49からの加速度検出結果を用いて移動方向や移動量を決定して、決定した移動方向に移動量分だけ球体移動装置10bを移動させるように、各電磁石21〜26で発生させる磁力を制御するための制御信号を生成して電磁石駆動部43に供給する。電磁石駆動部43は、移動制御部42bから供給された制御信号に基づき電磁石21〜26を駆動して、球体移動装置10bが決定した移動方向に移動量分だけ移動するように磁性流体を、電磁石21〜26で発生した磁力によって移動させる。
【0104】
[球体移動装置の移動動作(光強度の強い方向に移動するとき)]
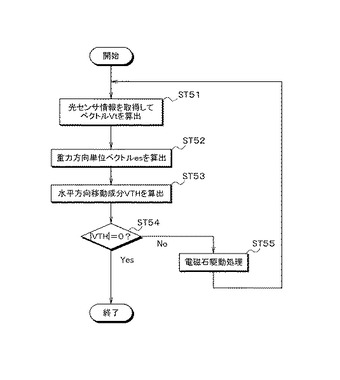
図18は、球体移動装置10bおける駆動動作を示すフローチャートである。ステップST51で移動制御部42bは、光センサ情報を取得してベクトルVTを算出する。移動制御部42bは、光センサ71〜76から光強度を示す光センサ情報を取得する。また、移動制御部42bは、取得した光センサ情報で示された強度G71〜G76を用いて式(20)からベクトルVTを算出してステップST52に進む。
【0105】
ステップST52で移動制御部42bは、重力方向単位ベクトルesの算出を行う。移動制御部42bは、3軸加速度センサ49からの加速度検出結果に基づいて重力方向単位ベクトルesを算出してステップST53に進む。
【0106】
ステップST53で移動制御部42bは、水平方向移動成分VTHの算出を行う。移動制御部42bは、ステップST51で算出したベクトルVTとステップST52で算出した重力方向単位ベクトルesを用いて式(22)の演算を行い、水平方向移動成分VTHを算出してステップST54に進む。
【0107】
ステップST54で移動制御部42bは、水平方向移動成分VTHの大きさが「0」であるか否かを判別する。移動制御部42bは、水平方向移動成分VTHの大きさが「0」でないときステップST55に進み、水平方向移動成分VTHの大きさが「0」あるときは、球体移動装置10bを停止する。
【0108】
ステップST55で移動制御部42bは、電磁石駆動処理を行う。移動制御部42bは、上述の式(22)の演算を行い、移動目標ベクトルVFTを算出して、移動目標ベクトルVFTが示す球面上の位置を目標接地点PFTとする。また、移動制御部42bは、設定した目標接地点PFTに応じて、駆動する電磁石および電磁石の駆動電流を決定する。さらに、移動制御部42は、決定された駆動電流で電磁石を駆動する駆動動作を電磁石駆動部43で行わせて、電磁石で発生された磁力によって、目標接地点PFTで接地するように磁性流体15を移動させる。移動制御部42aは、電磁石駆動処理を行ったのちステップST51に戻り、移動後の球体移動装置10bの位置で、新たに光センサ71〜76からの光センサ情報や3軸加速度センサ49からの加速度検出結果を取得して上述の処理を繰り返す。
【0109】
このように、球体移動装置10bにおける駆動動作を行うものとすれば、光強度の強い方向に球体移動装置10bを自動的に移動させることができる。例えば、球体移動装置10bに照明を当てることで、照明の光源に近づくように球体移動装置10bを移動させることができる。また、照明の光源方向とは異なる方向に球体移動装置10bを移動させるものとすれば、球体移動装置10bに光を当てたときに、光から逃れるように球体移動装置10bを移動させることも可能となる。
【0110】
<4.第4の実施の形態>
次に、センサの情報例えば音センサから得られた音検出情報を元に移動方向と量を決定して、球体移動装置を移動させる場合について説明する。
【0111】
[球体移動装置の構成]
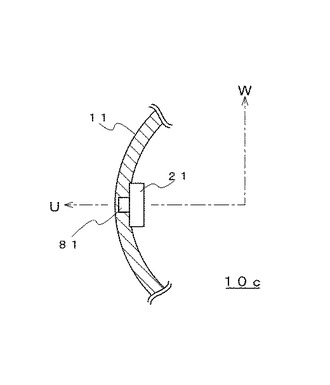
図19は、座標「V=0」の平面での断面の一部を示している。音センサ81は、外部からの音の強度を検出できるようにして、球状殻体11と電磁石21と間に設ける。音センサ81は、例えば音声を収音するマイクを用いて構成する。また、外部からの音が球状殻体11を透過して音センサ81に届きにくい場合、音を通過させるための貫通穴を球状殻体11に設ける。なお、貫通穴の穴径は、球体移動装置10cの転動が阻害されないように設定する。また、電磁石22〜26の位置にも同様に音センサ82〜86を設ける。音センサ81で検出された音声レベルは、強度G71とする。音センサ82〜86で検出された音声レベルは、強度G72〜G76とする。このように音センサ81〜86で検出された音声レベルを強度G71〜G76とすると、光センサ71〜76で検出された光強度を強度G71〜G76とした場合と同様な処理を行うことで、音センサ81〜86で取得した音の強度が強い方向に球体移動装置10cを移動させることができる。
【0112】
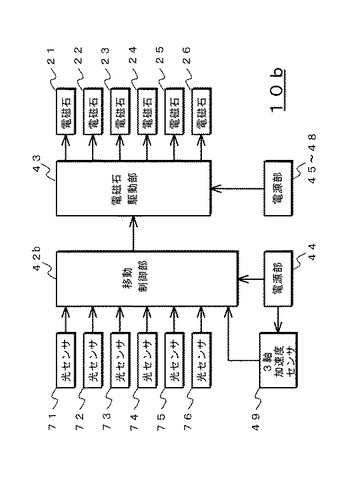
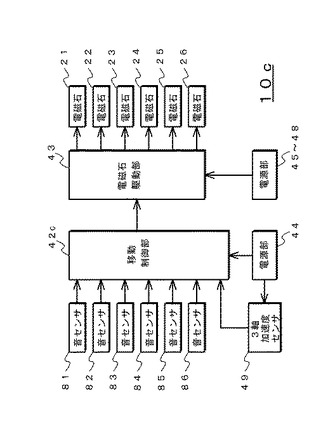
図20は、球体移動装置10cの機能ブロック図を示している。音センサ81〜86は、音声レベルを検出して検出結果を、音センサ情報として移動制御部42cに供給する。また、3軸加速度センサ49は、加速度検出結果を移動制御部42cに供給する。
【0113】
移動制御部42cは、音センサ81〜86からの音センサ情報と3軸加速度センサ49からの加速度検出結果を用いて移動方向や移動量を決定して、決定した移動方向に移動量分だけ球体移動装置10cを移動させるように、各電磁石21〜26で発生させる磁力を制御するための制御信号を生成して電磁石駆動部43に供給する。電磁石駆動部43は、移動制御部42bから供給された制御信号に基づき電磁石21〜26を駆動して、球体移動装置10cが決定した移動方向に移動量分だけ移動するように磁性流体を、電磁石21〜26で発生した磁力によって移動させる。
【0114】
[球体移動装置の移動動作(音の強度の強い方向に移動するとき)]
図21は、球体移動装置10cおける駆動動作を示すフローチャートである。ステップST61で移動制御部42bは、音センサ情報を取得してベクトルVTを算出する。移動制御部42bは、音センサ81〜86から音の強度を示す音センサ情報を取得する。また、移動制御部42bは、取得した音センサ情報で示された強度G71〜G76を用いて式(20)からベクトルVTを算出してステップST62に進む。
【0115】
ステップST62で移動制御部42bは、重力方向単位ベクトルesの算出を行う。移動制御部42bは、3軸加速度センサ49からの加速度検出結果に基づいて重力方向単位ベクトルesを算出してステップST63に進む。
【0116】
ステップST63で移動制御部42bは、水平方向移動成分VTHの算出を行う。移動制御部42bは、ステップST61で算出したベクトルVTとステップST62で算出した重力方向単位ベクトルesを用いて式(22)の演算を行い、水平方向移動成分VTHを算出してステップST64に進む。
【0117】
ステップST64で移動制御部42bは、水平方向移動成分VTHの大きさが「0」であるか否かを判別する。移動制御部42bは、水平方向移動成分VTHの大きさが「0」でないときステップST65に進み、水平方向移動成分VTHの大きさが「0」あるときは、球体移動装置10cを停止する。
【0118】
ステップST65で移動制御部42bは、電磁石駆動処理を行う。移動制御部42bは、上述の式(22)の演算を行い、移動目標ベクトルVFTを算出して、移動目標ベクトルVFTが示す球面上の位置を目標接地点PFTとする。また、移動制御部42bは、設定した目標接地点PFTに応じて、駆動する電磁石および電磁石の駆動電流を決定する。さらに、移動制御部42は、決定された駆動電流で電磁石を駆動する駆動動作を電磁石駆動部43で行わせて、電磁石で発生された磁力によって、目標接地点PFTで接地するように磁性流体15を移動させる。移動制御部42aは、電磁石駆動処理を行ったのちステップST61に戻り、移動後の球体移動装置10cの位置で、新たに音センサ81〜86からの音センサ情報や3軸加速度センサ49からの加速度検出結果を取得して上述の処理を繰り返す。
【0119】
このように、球体移動装置10cにおける駆動動作を行うものとすれば、音の強度の強い方向に球体移動装置10cを自動的に移動させることができる。
【0120】
また、音の反射などの影響がある場合は、音の到達時刻の早さを音の強度のかわりに利用することで反射などの影響を回避して、直接到達する音の方向に球体移動装置10cを自動的に移動させることもできる。
【0121】
<5.第5の実施の形態>
上述の第1〜第4の実施の形態では、球状殻体11の中心を通る軸に対する慣性モーメントに大きく偏りがなく、球体移動装置を任意の方向に容易に転動させることができるように、電磁石や移動制御部および電磁石駆動部や電源部等を予め等しい重量に調整して、球状殻体11の内面に均等に配置して固定するものとしている。この場合、電磁石や各部の重量を等しく調整する作業が必要となる。また、電磁石や各部の重さを最も重量の重いものに合わせると、球体移動装置が重くなってしまう。そこで、電磁石や各部の重さの違い等によって、球状殻体11の中心を通る軸に対する慣性モーメントに偏りを生じる場合でも、磁性流体の移動を複雑に制御することなく、球体移動装置をスムーズに転動させる場合について説明する。
【0122】
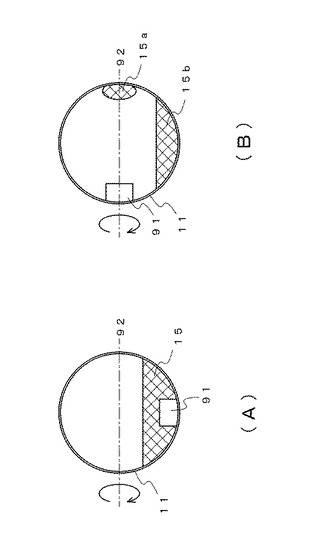
図22は、第5の実施の形態についての動作原理を示している。図22の(A)は、球状殻体11の内部に設けられた移動制御部や電源部等の設置物91によって、球状殻体11の中心を通る軸に対する慣性モーメントに大きく偏りを生じている場合を示している。この場合、回転軸92を中心として球状殻体11を回転させると、設置物91が天頂部に達するまでは転動を抑制する力が作用し、天頂部を越えると転動を促進する力が作用する。そこで、図22の(B)に示すように、一部の磁性流体15aが設置物91と対向する位置に留まるように磁力を生じさせて、重心が球状殻体11の中心に近づくように、すなわち球状殻体11の中心を通る軸に対する慣性モーメントの偏りが小さくなるようにする。このように、一部の磁性流体15aが設置物91と対向する位置に留まるように磁力を発生させておけば、残りの磁性流体15bを上述の第1〜第4の実施の形態と同様にして移動させることで、磁性流体の移動を複雑に制御しなくとも、球体移動装置をスムーズに転動させることができるようになる。
【0123】
<6.第6の実施の形態>
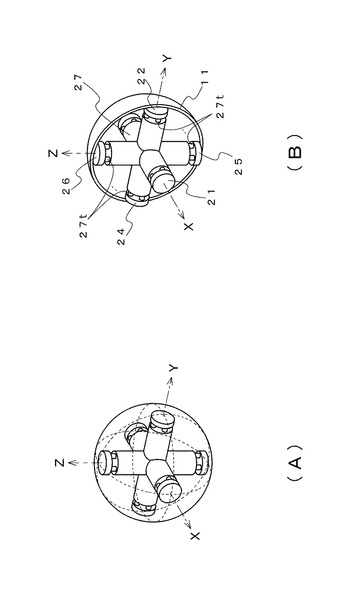
図23〜図25は、球状殻体11の内部に支柱27を設けた場合を示している。球状殻体11の内部に支柱27を設けると、球状殻体11の強度を高めることができる。また、支柱27の内部に移動制御部や電磁石駆動部および電源部等を内蔵して、支柱27の端部に電磁石を設ければ、各部の接続や電磁石と電磁石駆動部との接続等が容易となり、球体移動装置を簡単に組み立てることができるようになる。
【0124】
図23は、支柱を設けた第1の構造を示している。なお、図23の(A)は支柱を設けたときの球体移動装置の内部構造、図23の(B)は球状殻体11の半球部分を切り取った状態を示す斜視図である。
【0125】
支柱27の端部には、電磁石を介した支柱27の支持機能と電磁石への駆動電流の供給経路となる機能を有する端子部27tを設ける。端子部27tは、支柱27の端部面から突出するように形成して、電磁石と端子部27tが接続された状態でも、電磁石と支柱の端部面との間に空隙を生じるようにする。
【0126】
図24は、支柱を設けた第2の構造を示している。なお、図24の(A)は球状殻体11の半球部分を切り取った状態を示す斜視図、図24の(B)は球状殻体11の半球部分を切り取った状態の側面図を示している。
【0127】
支柱27の端部面には電磁石を設けるものとして、支柱27の端部側面に支持脚27sを設ける。支持脚27sは、球状殻体11に当接して支柱27を球状殻体11の内部に固定するものである。また、支持脚27sは、電磁石よりも突出するように形成して、球状殻体11と支持脚27sが当接した状態でも、電磁石と球状殻体11との間に空隙を生じるようにする。
【0128】
図25は、支柱を設けた第3の構造を示している。なお、図25の(A)は支柱を設けたときの球体移動装置の内部構造、図25の(B)は球状殻体11の半球部分を切り取った状態を示す斜視図である。
【0129】
このように、電磁石と支柱の端部面との間、または電磁石と殻体との間に空隙を生じさせることで、空隙が設けられていない場合よりも、電磁石の部分に磁性流体が集まり易くなり、磁性流体の移動もスムーズとなる。
【0130】
第3の構造では、電磁石の部分に集まる磁性流体を多くできるように、電磁石とは異なる位置、例えば移動制御部42や電源部44,45等の位置に支柱27を設けた場合を示している。このように支柱27を設けると、電磁石の部分の空間が広くなることから、磁性流体の移動が第1の構造や第2の構造に比べて容易で、電磁石の部分に磁性流体が集まり易くなる。
【0131】
<7.第7の実施の形態>
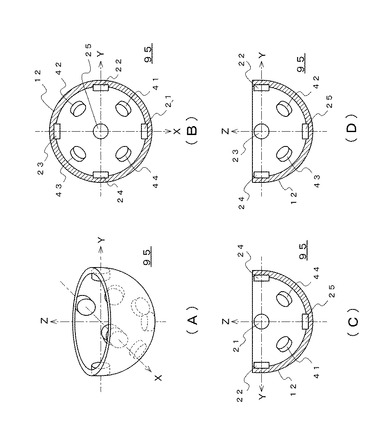
図26は、重心移動装置を適用した姿勢制御装置における構成を示している。なお、図26の(A)は姿勢制御装置95の斜視図、図26の(B)は上面図、図26の(C)は位置「X=0」での断面を図26の(B)における矢印SA方向からみた側面図、図26の(D)は位置「X=0」での断面を、図26の(B)における矢印SB方向からみた側面図である。
【0132】
姿勢制御装置95は、球体の一部の曲面を持つ形状である例えば半球状殻体12を用いて構成する。半球状殻体12の内面には、複数の電磁石を固定して配置する。複数の電磁石は、半球状殻体12を任意の方向に容易に傾斜させることができるように、半球状殻体12の内面に均等に配置する。例えば3軸(X軸,Y軸,Z軸)の交点と半球状殻体12の中心を一致させたとき、3軸と半球状殻体12が交わる5つの点に、それぞれ等しい重さとされている電磁石21〜25を配置する。
【0133】
また、半球状殻体12の内面には、外部からの移動指令を受信する移動指令受信部41、受信された移動指令に応じて電磁石で発生させる磁力を制御する移動制御部42、移動制御部42からの制御信号に基づいて電磁石で磁力を発生させる電磁石駆動部43、各部を動作させるための電源部44を固定して配置する。
【0134】
このように姿勢制御装置95を構成すると、電磁石21〜25で発生させる磁力に応じて半球状殻体12の内部に設けた磁性流体(図示せず)が移動して、姿勢制御装置95の重心が変化する。このため、重心の変化に伴い姿勢制御装置95の姿勢が変化する。したがって、電磁石21〜25で発生させる磁力を制御して、姿勢制御装置95を所望の姿勢とすることができる。さらに、電磁石21〜25で発生させる磁力を制御して、磁性流体の移動を繰り返し行うものとすれば、姿勢制御装置95を所望の姿勢に設定できるだけでなく、揺動動作等も行うことが可能となる。
【0135】
なお、図26では、半球状殻体12を用いた場合について図示しているが、球体の一部の曲面を接地面とする形状であれば、姿勢制御装置95の殻体の形状は半球状に限られるものではない。
【0136】
<8.第8の実施の形態>
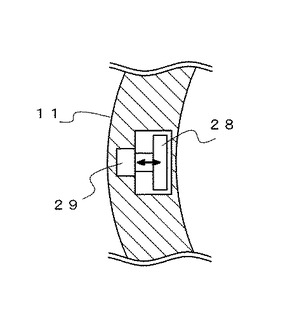
図27は、磁力の発生手段として永久磁石を用いた場合の構成を示している。永久磁石を用いる場合、永久磁石が球状殻体11の内面に固定されている状態では、磁力を変化させることができない。そこで、永久磁石を用いる場合、例えば永久磁石28を球状殻体11に内蔵させて、永久磁石駆動部29で永久磁石28を球状殻体11の中心方向に進退させることで、磁力を変化させる。
【0137】
このように永久磁石を用いる場合でも、磁力を制御可能な構成とすれば、電磁石を用いた場合と同様に、球体移動装置を転動させたり姿勢制御装置の姿勢を変化させることが可能となる。
【0138】
また、電磁石と永久磁石を組み合わせて用いるものとしてもよい。
【産業上の利用可能性】
【0139】
この発明によれば、球体または球体の一部の曲面を持つ形状で、球体面または前記曲面を接地面とする殻体の内部に流動性物質が設けられて、この流動性物質を殻体内で移動させることにより重心が所望の位置に移動される。このため、例えば回転動作や揺動動作あるいは姿勢変化を行う遊技機、搬送装置の駆動部等に適用することができる。
【図面の簡単な説明】
【0140】
【図1】球状移動装置の斜視図である。
【図2】球状移動装置の断面概略図である。
【図3】球状殻体の内面の配置図である。
【図4】第1の実施の形態の機能ブロック図である。
【図5】UVW座標系とXYZ座標系の関係を示す図である。
【図6】回転角度と移動方向角度を示す図である。
【図7】接地点が移動目標点の位置となったのち、さらに移動させる場合を示す図である。
【図8】第1の実施の形態における駆動動作を示すフローチャートである。
【図9】現在の姿勢を検出するための姿勢検出センサを設けた場合の構成を示す図である。
【図10】XYZ座標系における球体移動装置の位置を検出する構成を示す図である。
【図11】発光部を設けた場合を示す図である。
【図12】撮像装置で取得できる情報を説明するための図である。
【図13】第2の実施の形態の機能ブロック図である。
【図14】第2の実施の形態の駆動動作を示すフローチャートである。
【図15】電磁石の位置に光センサを設けた場合を示す図である。
【図16】球体移動装置における移動方向の断面概略図である。
【図17】第3の実施の形態の機能ブロック図である。
【図18】第3の実施の形態の駆動動作を示すフローチャートである。
【図19】電磁石の位置に音検出センサを設けた場合を示す図である。
【図20】第4の実施の形態の機能ブロック図である。
【図21】第4の実施の形態の駆動動作を示すフローチャートである。
【図22】第5の実施の形態の動作原理を説明するための図である。
【図23】殻体に支柱を設けたときの第1の構造を示す図である。
【図24】殻体に支柱を設けたときの第2の構造を示す図である。
【図25】殻体に支柱を設けたときの第3の構造を示す図である。
【図26】姿勢制御装置の構成を示す図である。
【図27】永久磁石を用いた場合の構成を示す図である。
【符号の説明】
【0141】
10,10a,10b,10c・・・球体移動装置、11・・・球状殻体、12・・・半球状殻体、15,15a,15b・・・磁性流体、21〜26・・・電磁石、27・・・支柱、27s・・・支持脚、27t・・・端子部、28・・・永久磁石、29・・・永久磁石駆動部、40,40a・・・アンテナ、41・・・移動指令受信部、41a・・・移動指令/位置情報受信部、42,42a,42b,42c・・・移動制御部、43・・・電磁石駆動部、44〜48・・・電源部、49・・・3軸加速度センサ、51・・・点滅駆動部、61〜66・・・発光デバイス、71〜76・・・光センサ、81〜86・・・音センサ、90・・・撮像装置、91・・・設置物、92・・・回転軸、95・・・姿勢制御装置
【技術分野】
【0001】
この発明は、重心移動装置と重心移動方法に関する。詳しくは、球状の殻体内または接地面が曲面とされている殻体内に流動性物質を設け、該流動性物質の流動を制御して、重心を所望の位置に移動させることにより、姿勢の変更や球体の移動を容易に行えるようにするものである。
【背景技術】
【0002】
従来、所望の方向へ移動自在となる球体移動装置として、特許文献1の球体移動装置では、車輪部を球体内部で動作させることにより、球体を移動させることが行われている。また、特許文献2の球殻体移動装置は、球体の内部に走行体を設けて、この走行体を移動させることにより、球体を転動させることが行われている。
【0003】
【特許文献1】特開平9−254838号公報
【特許文献2】特開平11−114234号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、球体内部に車輪部を設ける構成では、球体が所望の方向に移動するように、車輪部を持った駆動装置を球体内で移動させる必要がある。このように、駆動装置を球体内で移動させるためには、特殊な車輪構造や複数の車輪を持つなど複雑な構造が必要となってしまう。
【0005】
また、球体内に設けた走行体を移動させる場合、球体内に設けた走行体が転倒しないように、転倒防止手段を設けなければならないため、構造が複雑となる。
【0006】
そこで、この発明では、重心移動を簡単な構成で容易に行えるようにして、球体の転動等を可能とする重心移動装置と重心移動方法を提供するものである。
【課題を解決するための手段】
【0007】
この発明の第1の側面は、
球体または球体の一部の曲面を持つ形状で、球体面または前記曲面を接地面とする殻体と、
前記殻体内に設けられた流動性物質と、
前記殻体内に設けられて、前記流動性物質を移動させる流動性物質駆動部と、
前記殻体内に設けられて、前記流動性物質駆動部を制御して、前記流動性物質を移動させることにより所望の位置に重心を移動させる移動制御部と
を備える重心移動装置にある。
【0008】
また、この発明の第2の側面は、
球体または球体の一部の曲面を持つ形状で球体面または前記曲面を接地面とする殻体において、前記殻体の内部に設けられている流動性物質を前記殻体の内部に設けられている流動性物質駆動部によって移動させるステップと、
前記殻体の内部に設けられている移動制御部によって、前記流動性物質駆動部を制御して、前記流動性物質を移動させることにより所望の位置に重心を移動させるステップとを具備する重心移動方法にある。
【0009】
この発明においては、球体または球体の一部の曲面を持つ形状で、球体面または前記曲面を接地面とする殻体の内部に、流動性物質例えば磁性流体が設けられる。殻体内面には複数の磁石が均等に配置されており、磁石駆動部によって磁力が制御される。外部から移動位置を示す情報が供給されたとき、移動制御部は、現在位置と移動位置から移動位置の方向および移動位置までの距離を判別して、判別結果に応じて磁性流体の移動に用いる磁石と磁力を決定して、該決定に基づき前記磁石駆動部で前記磁石を駆動させる。また、移動制御部は、現在位置から移動位置までの距離が所定距離よりも長いとき、所定距離に応じて磁石と磁力を決定して前記磁性流体を移動させる処理を繰り返すことで、所定距離単位で移動を行う。また、光や音で移動指示が行われたとき、光の方向や音の方向を判別して、判別結果に応じて磁性流体の移動に用いる磁石と磁力が決定される。さらに、殻体の内部には殻体内面を支持する支柱が設けられる。また、重心を移動させる際に、複数の磁石における所定の磁石で磁力を発生させて磁性流体の一部を吸着させておくことで、慣性モーメントの偏りが補正される。
【発明の効果】
【0010】
この発明によれば、接地面が曲面とされている殻体内に流動性物質が設けられて、この流動性物質が駆動部によって殻体内で流動される。また、移動制御部によって、流動性物質の流動が制御されて、重心が所望の位置に移動される。このため、複雑な移動機構を必要とせず、任意の方向に移動することが可能となる。また、姿勢を任意の姿勢とすることが容易に可能となる。
【発明を実施するための最良の形態】
【0011】
以下、発明を実施するための最良の形態について説明する。この発明は、球体または球体の一部の曲面を持つ形状で、球体面または前記曲面を接地面とする殻体内に流動性物質例えば磁性流体を設けて、この磁性流体を移動させることによって、重心移動を行うものである。なお、説明は以下の順序で行うものとする。また、第1〜6の実施の形態は、重心移動装置を球体移動装置に適用した場合、第7の実施の形態は、重心移動装置を姿勢制御装置に適用した場合ついて説明している。
【0012】
1.第1の実施の形態(球体移動装置と接地面との間で滑りを生じない場合)
2.第2の実施の形態(球体移動装置と接地面との間で滑りを生じる場合)
3.第3の実施の形態(光検出情報をもとに球体移動装置を移動させる場合)
4.第4の実施の形態(音検出情報をもとに球体移動装置を移動させる場合)
5.第5の実施の形態(球状殻体の中心を通る軸に対する慣性モーメントに偏りを生じる場合)
6.第6の実施の形態(球状殻体内に支柱を設けた場合)
7.第7の実施の形態(姿勢制御装置について)
8.第8の実施の形態(電磁石に代えて永久磁石を用いた場合)
【0013】
<1.第1の実施の形態>
[球体移動装置の構成]
図1は、重心移動装置を適用した球体移動装置の斜視図である。また、図2は、この球体移動装置の断面概略図である。なお、図2の(A)は図1における位置「Z=0」での断面を上面側からみたとき(図1の矢印SA方向からみたとき)の図、図2の(B)は、図1における位置「X=0」での断面を前面側からみたとき(図1の矢印SB方向からみたとき)の図をそれぞれ示している。
【0014】
球体移動装置10は、球状殻体11を用いて構成する。球状殻体11の内面には、複数の電磁石を固定して配置する。複数の電磁石は、球状殻体11の中心を通る軸まわりの回転運動に対して偏りがなく、球状殻体11を任意の方向に容易に回転させることができるように、球状殻体11の内面に均等に配置する。例えば3軸(X軸,Y軸,Z軸)の交点と球状殻体11の中心を一致させたとき、3軸と球状殻体11が交わる6つの点に、それぞれ等しい重さとされている電磁石21〜26を配置する。
【0015】
また、球状殻体11の内面には、図3に示すように、外部からの移動指令を受信する移動指令受信部41、受信された移動指令に応じて電磁石で発生させる磁力を制御する移動制御部42、移動制御部42からの制御信号に基づいて電磁石で磁力を発生させる電磁石駆動部43、各部を動作させるための電源部44〜48を固定して配置する。なお、図3の(A)は、図1における位置「Z=0」での断面を上面側からみたとき(図1の矢印SA方向)の断面概略図を示している。図3の(B)は、図1における位置「X=0」での断面を後面側からみたとき(図1の矢印SC方向からみたとき)の図を示している。また、図3の(C)は、図1における位置「X=0」での断面を前面側からみたとき(図1の矢印SB方向からみたとき)の図を示している。
【0016】
さらに、球状殻体11の内部には、図2に示すように、錘として機能する磁性流体15を設ける。この磁性流体15は、磁力によって吸着する流体である。
【0017】
球体移動装置10は、移動目標点に応じて、駆動する電磁石および電磁石の駆動電流の決定を行い、決定した駆動電流で電磁石を駆動して磁力を発生させて、球体移動装置10の重心の最下点が移動目標点の位置になるように磁性流体15を移動させる。このように、磁性流体15を移動させることで、球体移動装置10は、スムーズに転動して移動目標点に移動することになる。
【0018】
ここで、球状殻体11の中心を通る回転軸に対する慣性モーメントに大きく偏りがある場合、すなわち球体移動装置10の重心が回転軸から離れている場合、球体移動装置10の重心の位置は、球体移動装置10の転動に伴い上下方向に変動することがある。このため、球体移動装置10をスムーズに転動させるためには、球体移動装置10が転動しても球体移動装置10の重心の位置が上下方向に変動することのないように、磁性流体15の移動を複雑に制御しなければならない。例えば、球体移動装置10の重心が回転軸から離れている場合、球体移動装置10の重心が高い位置へと移動するときには転動を抑制する力が生じ、球体移動装置10の重心が低い位置へと移動する場合は転動を促進する力が生じる。したがって、転動を抑制する力や転動を促進する力が生じないように、磁性流体15の移動を複雑に制御しなければならない。
【0019】
そこで、移動指令受信部41と移動制御部42と電磁石駆動部43および電源部44〜48は、球状殻体11の中心を通る軸に対する慣性モーメントに大きな偏りがなく、球体移動装置10を任意の方向に容易に移動させることができるように配置する。例えば、移動指令受信部41と移動制御部42と電磁石駆動部43および電源部44〜48を、予め個々の電磁石21〜26と等しい重量に調整しておき、近接する3つの電磁石から等しい距離の位置にそれぞれ配置する。なお、電磁石や移動指令受信部等は、球状殻体11の内面から突出して配置してもよく、球状殻体11が厚い場合には、球状殻体11に埋設してもよい。
【0020】
図4は、球体移動装置10の機能ブロック図を示している。アンテナ40は、移動指令を示す外部からの無線信号を受信して移動指令受信部41に供給する。移動指令受信部41は、受信した信号に基づき外部から供給された移動指令を得て移動制御部42に供給する。移動制御部42は、移動指令に基づき移動方向や移動量を決定して、決定した移動方向に移動量分だけ球体移動装置10が移動するように、各電磁石で発生させる磁力を制御するための制御信号を生成して電磁石駆動部43に供給する。電磁石駆動部43は、移動制御部42から供給された制御信号に基づき電磁石21〜26を駆動して、球体移動装置10が決定した移動方向に移動量分だけ移動するように磁性流体15を移動させる。電源部44は、移動指令受信部41と移動制御部42に対して電力供給を行う。電源部45〜48は、電磁石駆動部43に対して電力供給を行う。
【0021】
[球体移動装置と接地面との間で滑りを生じない場合の移動動作]
次に、球体移動装置10の移動動作について説明する。球体移動装置10は、移動方向の電磁石に駆動電流を供給して磁力を発生させる。このとき、磁性流体15は、発生された磁力に応じて移動して、磁力を発生した移動方向の電磁石に吸着される。このため、球体移動装置10は、磁性流体15の移動に伴い重心が移動したことから移動方向に転動して、結果として球体移動装置10が移動する。例えば図2の(A)において、電磁石21で磁力を発生して磁性流体15を吸着すれば、球体移動装置10の重心がX方向に移動して、球体移動装置10がX方向に転動する。すなわち、球体移動装置10をX方向に移動させることができる。また、任意の方向に関しては、移動方向に存在する3つの電磁石で発生される磁力を調整することで可能となる。
【0022】
球体移動装置10と接地面との間で滑りを生じない場合、電磁石21〜26の駆動結果から球体移動装置10の位置と姿勢を一意に求めることができる。図5は、球状殻体11に固定された座標系であるUVW座標系と空間座標系であるXYZ座標系の関係を示している。例えば、初期状態では、U軸とX軸、V軸とY軸、W軸とZ軸が一致しているものとする。
【0023】
また、移動指令がたとえば移動位置(x1,y1)への移動を示しており、図6に示すように、球体移動装置10を移動指令に応じて(X,Y)=(x1,y1)の位置に移動するとき、移動制御部42は、回転角度αと移動方向角度βを定義する。なお、図6の(A)は球状殻体11の上面図を示しており、X軸に対する位置(x1,y1)の方向の角度を移動方向角度βとする。また、図6の(B)は、球状殻体11をXY平面と垂直であって移動方向となる面(XY平面に対して垂直でT−T’を通る面)で切断したときの断面図を示している。この図6の(B)に示す円弧の長さARCと位置(x1,y1)までの移動距離が一致するときの球状殻体11の回転角度を回転角度αとする。
【0024】
ここで、移動距離を「L」、球状殻体11の外側球面の半径を「r」としたとき、回転角度αは式(1)から算出できる。また、移動方向角度βは式(2)〜(5)から算出する。
【0025】
【数1】
【0026】
球状殻体11における移動前の接地点pのUVW座標系の座標は、座標(0,0,−r)である。また、球体移動装置10が(X,Y)=(x1,y1)の位置に移動したときの球状殻体11の接地点p’、すなわち移動目標点である接地点p’のUVW座標系の座標(u’,v’,w’)は、式(6)(7)で求めることができる。
【0027】
【数2】
【0028】
なお、R(α,β)は回転行列である。ここで、回転行列について説明する。例えば、Z軸まわりのθ回転をあらわす行列をRz(θ)、Y軸まわりのθ回転をあらわす行列をRy(θ)とする。式(8)は行列Rz(θ)、式(9)は行列Ry(θ)を示している。
【0029】
【数3】
【0030】
まず、Z軸周りに「−β」だけ回転して、Y軸と進行方向の回転軸を合わせる。次にY軸周りに「α」だけ回転させて(右ねじ則の逆で定義)、そしてZ軸まわりに「β」だけ回転させてもとの軸の位置に戻すと、所望の回転をしたことになる。この動作をRz,Ryを使って表記すると式(10)になる。
R(α,β)=Rz(β)・Ry(α)・Rz(−β) --(10)
【0031】
したがって、式(10)に式(8)(9)を代入すると式(11)となり、式(11)を整理すると式(7)となる。
【0032】
【数4】
【0033】
また、回転行列Rの逆行列について考えると、Z軸周りに「−β」回転、Y軸周りに「−α」回転、Z軸周りに「β」回転させることと同じであることから、回転行列Rの逆行列は式(12)で示すことができる。
R−1(α,β)=Rz(β)・Ry(−α)・Rz(−β)=R(−α,β) --(12)
【0034】
移動制御部42は、球状殻体11に固定されたUVW座標系における移動目標点を決定したことから、この移動目標点に応じて、駆動する電磁石および電磁石の駆動電流を決定する。移動制御部42は、決定された駆動電流で電磁石を電磁石駆動部43によって駆動させることにより磁力を発生させて、球体移動装置10の重心の最下点が移動目標点の位置になるように磁性流体15を移動させる。この磁性流体15の移動に伴い、球体移動装置10が転動されて、球体移動装置10は所望の移動先に移動することになる。
【0035】
また、球体移動装置10の接地点が移動目標点の位置となったのち、さらに球体移動装置10を移動させる場合には、図7で示すように、XYZ座標系の原点を(x1,y1,0)に移動させたものと等しいU’V’W’座標系を球状殻体11に固定して新たに定義する。
【0036】
なお、図7の(A)は球状殻体11の上面図を示している。また、図7の(B)は、球状殻体11をXY平面と垂直であって移動方向となる面(XY平面に対して垂直でT−T’を通る面)で切断したときの断面図を示している。
【0037】
次の移動位置(x2,y2)に移動させるとき、(x2’,y2’)=(x2−x1,y2−y1)として、上述の移動動作と同様に移動距離「L’」、回転角度α’、移動方向角度β’を定義する。このとき、球体移動装置10が位置(x2,y2)に移動したときの球状殻体11における接地点p’’、すなわち移動目標点である接地点p’’のU’V’W’座標系の座標(u’’,v’’,w’’)は、式(13)で求めることができる。
【0038】
【数5】
【0039】
ここで、U’V’W’座標系を初期のUVW座標系に変換する行列を姿勢行列Qとして定義すると、姿勢行列Qを用いて式(14)からUVW座標系での座標(u’’,v’’,w’’)を算出できる。
【0040】
【数6】
【0041】
姿勢行列Qを掛けることは、回転行列R(α,β)の逆行列を掛けることであり、上述の式(12)に示す逆行列を用いればよい。すなわち、姿勢行列Qは式(15)となる。
【0042】
Q=R−1(α,β)=R(−α,β) --(15)
移動制御部42は、球状殻体11に固定されたUVW座標系における新たな移動目標点を決定したことから、新たな移動目標点に応じて、駆動する電磁石および電磁石の駆動電流を決定する。移動制御部42は、決定された駆動電流で電磁石を電磁石駆動部43によって駆動させることにより磁力を発生させて、球体移動装置10の重心の最下点が移動目標点の位置になるように磁性流体15を移動させる。この磁性流体15の移動に伴い、球体移動装置10が転動されて、球体移動装置10は所望の移動先に移動することになる。
【0043】
また、球体移動装置10の移動に伴い、球体移動装置10の姿勢状態が回転行列R(α’,β’)だけ回転した状態となっているので、次回の移動時に用いられる姿勢行列Qを式(16)のように更新しておく。
Q=QR(−α’,β’) --(16)
【0044】
なお、上述の例では、初期状態でXYZ座標系とUVW座標系が等しいため、最初の移動である位置(x1,y1)への移動時には姿勢行列Qが単位行列であったが、初期状態で姿勢が一致しない場合は、あらかじめ姿勢の初期状態の姿勢行列Qを求めておけば、同様に処理できる。姿勢の状態は、球状殻体11上の異なる3点のXYZ座標系とUVW座標系の関係が明らかになれば、逆行列演算で求められる。
【0045】
球体移動装置10の移動において、図1に示すように電磁石を配置している場合、一度の移動動作で移動できる最大移動距離Lmaxは、球体移動装置10の球状殻体11における外側球面の半径を「r」とすると、「Lmax=πr/2」に制限される。したがって、球体移動装置10は、最大移動距離Lmax以下に設定した移動距離(以下「規定距離」という)Lsを設けて、規定距離Ls以下の移動動作を繰り返すことで、規定距離Lsよりも大きい距離の移動を行う。すなわち、現在位置から規定距離Lsの位置を途中点として、途中点までの移動動作を繰り返し、残存距離が規定距離Ls以下となったとき、移動目標点の位置となるように移動動作を行う。
【0046】
図8は、球体移動装置10おける駆動動作を示すフローチャートである。ステップST11で移動制御部42は、移動位置を受信する。移動制御部42は、移動指令受信部41で受信された移動指令が示す移動位置を判別してステップST12に進む。この移動指令は、例えば移動位置(xn,yn)を示すものとする。
【0047】
ステップST12で移動制御部42は、移動距離Lと移動方向角度βを算出する。また、移動制御部42は、回転角度αの初期化「α=0」を行う。なお、現在位置を位置(xn−1,yn−1)とした場合、移動距離Lは式(17)において「x0」を「xn−1」、「y0」を「yn−1」、「x1」を「xn」、「y1」を「yn」に置き換えれば算出できる。
【0048】
【数7】
【0049】
ステップST13で移動制御部42は、移動距離Lが規定距離Ls以下であるか否か判別する。移動制御部42は、移動距離Lが規定距離Ls以下であるときステップST14に進み、移動距離Lが規定距離Lsよりも大きいときステップST15に進む。
【0050】
ステップST14で移動制御部42は、駆動距離Lmvとして移動距離Lを設定する。また移動制御部42は、残存距離Ldを「0」としてステップST16に進む。
【0051】
ステップST15で移動制御部42は、駆動距離Lmvとして規定距離Lsを設定する。また移動制御部42は、移動距離Lから規定距離Lsを減算して残存距離LdとしてステップST16に進む。すなわち、ステップST15では途中点を設定する。
【0052】
ステップST16で移動制御部42は、駆動距離Lmv分の回転角度αmvを算出して、算出した回転角度αmvを回転角度αに加算して新たな回転角度αとしてステップST17に進む。
【0053】
ステップST17で移動制御部42は、電磁石駆動処理を行う。移動制御部42は、姿勢行列Qを用いて上述の式(14)の演算を行い、移動目標点を設定する。また、移動制御部42は、設定した移動目標点に応じて、駆動する電磁石および電磁石の駆動電流を決定する。さらに、移動制御部42は、決定された駆動電流で電磁石を駆動する駆動動作を電磁石駆動部43で行わせて、電磁石で発生された磁力によって、球体移動装置10の重心の最下点が移動目標点(または途中点)の位置になるように磁性流体15を移動させてステップST18に進む。
【0054】
ステップST18で移動制御部42は、残存距離Ldが「0」であるか否かを判別する。移動制御部42は、残存距離Ldが「0」でないときステップST19に進み、残存距離Ldが「0」であるときステップST20に進む。
【0055】
ステップST19で移動制御部42は、残存距離Ldを新たに移動距離Lに設定してステップST13に戻る。
【0056】
ステップST20で移動制御部42は、姿勢行列Qの更新を行ってステップST21に進む。移動制御部42は、上述の式(16)に示すように姿勢行列Qを更新してステップST21に進む。
【0057】
ステップST21で移動制御部42は、位置情報を記憶する。すなわち、移動制御部42は、移動動作が完了した位置を現在位置(xn−1,yn−1)として記憶することで、次の移動指令が行われたとき、現在位置(xn−1,yn−1)を基準として移動動作を行えるようにする。
【0058】
このような処理を行うものとすれば、移動指令で示された位置までの距離が規定距離Lsよりも大きいときは、規定距離Lsで移動動作が繰り返されて、残存距離Ldが規定距離Ls以下となったとき、残存距離Ldの移動動作が行われる。したがって、一度の移動動作で移動できる規定距離Lsを超えて、球体移動装置10を移動させることができる。
【0059】
<2.第2の実施の形態>
球体移動装置と接地面との間で滑りを生じる場合、球体移動装置は、駆動距離Lmvを設定して移動を行っても、移動距離が駆動距離Lmvと異なってしまうことがある。このため、球体移動装置は、移動指示によって指示された位置までの距離や方向だけで、指示された位置に正しく移動することができない。そこで、センサを用いて球体移動装置の位置と姿勢の検出を行い、球体移動装置は、センサの検出結果を用いることで、指示された位置に正しく移動する。
【0060】
[球体移動装置の構成]
図9は、球体移動装置10aにおける現在の姿勢を検出するための姿勢検出センサ、例えば3軸加速度センサ49を設けた場合の構成を示している。なお、3軸加速度センサ49は、球体移動装置10aに固定されていれば、球体移動装置10aの内部のいずれに設置してもよい。なお、図9では、移動指令/位置情報受信部の内部に3軸加速度センサ49を設けた場合を示している。また、球体移動装置10aにおいて、3軸加速度センサ49を除く他の部分は、上述の球体移動装置10と同様に構成する。
【0061】
3軸加速度センサ49のUsVsWs座標系は、図9に示すように、球体移動装置10aのUVW座標系の原点をセンサ位置に移動した座標系とする。3軸加速度センサ49が示す重力加速度の向きは、UVW座標系における球体移動装置10aの底面を指すベクトルの方向と等しくなる。したがって、球体移動装置10aは、3軸加速度センサ49で重力加速度を検出することで、球状殻体11上における接地点のUVW座標系の座標(ub,vb,wb)を推定できる。球体移動装置10aは、3軸加速度センサ49で得られたUsVsWs座標系における加速度の値As=(au,av,aw)から重力方向単位ベクトルes=As/|As|を算出する。また、球体移動装置10aは、球状殻体11の外側球面の半径「r」と重力方向単位ベクトルesを乗算する。すなわち(ub,vb,wb)=res=(rau/|As|,rav/|As|,raw/|As|)がUVW座標系における接地点の座標になる。
【0062】
この段階では、XYZ座標系とUVW座標系の関係については一意に決定されていない。したがって、XYZ座標系における球体移動装置10aの位置を検出するため、図10に示すように、球体移動装置10aの位置検出装置として、XY平面の上方に例えば撮像装置90を設ける。撮像装置90は、XY平面の上方から球体移動装置10aを撮像して、XY平面上における球体移動装置10aの中央の座標値(xc0,yc0)を特定する。この球体移動装置10aの中央の座標と球体移動装置10aの接地点座標から、接地点とそのとき頂点の座標の2点が特定される。
【0063】
また、球体移動装置10aにおける球状殻体11の外側球面に識別マークを設けて、この識別マークの位置を用いて球体移動装置10aの姿勢を特定する。
【0064】
識別マークとしては、球体移動装置10aの内部に配置されている電磁石もしくは移動指令受信部等の位置に、例えば外側に向けて発光する複数の発光部を配置し、これらを順番に1個点灯させる処理を繰り返す。また、各発光部の位置を予め保持しておき、点灯している発光部を検出したとき、駆動されている発光部の位置を判別することで、球状殻体上における一点の位置を取得できるようにする。
【0065】
図11は、座標「V=0」の平面での断面の一部を示している。発光部である発光デバイス61は、光の放射方向が球体移動装置10bの中心(球状殻体11の中心)から外側の向きとなるようにして、球状殻体11と電磁石21と間に設ける。この発光デバイス61は、発光ダイオード(LED:light emitting diode)等を用いて構成する。また、発光デバイス61からの光が球状殻体11を透過して外部に放射されない場合、光を外部に放射するための貫通穴を球状殻体11に形成する。なお、貫通穴の穴径は、球体移動装置10aの転動が阻害されないように設定する。また、電磁石22〜26の位置にも同様に発光デバイス62〜66を設ける。各電磁石の位置に設けた発光デバイスは、ある時刻で特定の1つだけが点灯している状態となるように順次点灯駆動する。
【0066】
撮像装置90で取得できる情報は、図12に示すように、XY平面上の座標である。しかし、点が球状殻体11上の点であることを考慮すれば、球状殻体11の中央のZ座標値は±r、中央以外の点灯した一点(UVW座標系における既知の座標(up1,vp1,wp1)の点)に関して得られたXY座標を(xc1,yc1)とすると、撮像装置90で観測できる球状殻体11上の点はZ≧0であるので、中央のXY座標値(xc0,yc0)を用いて式(18)からZ座標値(zc1)を求めることができる。
【0067】
【数8】
【0068】
これにより、球状殻体11上における3点のXYZ座標系の座標値(xc0,yc0,r),(xc0,yc0,−r),(xc1,yc1,zc1)とUVW座標系の座標値(ub,vb,wb),(−ub,−vb,−wb),(up1,vp1,wp1)が得られるので、式(19)から姿勢行列Qを求めることができる。なお、姿勢行列Qを求めることができるようにするため、撮像装置90で取得する一点は、中央以外の点灯した一点とする。
【0069】
【数9】
【0070】
また、球体移動装置10aの位置は球状殻体11の中央座標であるので座標値(xc0,yc0)である。
【0071】
このようにして、現在位置と移動目標点と現在の姿勢行列Qが求められることから、球体移動装置と接地面との間で滑りを生じる場合でも、上述の滑りを生じていない場合と同様に、上述の式(7)や式(14)等を用いて球体移動装置10aを移動目標点に正しく移動させることができる。
【0072】
図13は、球体移動装置10aの機能ブロック図を示している。アンテナ40aは、外部からの移動指令を示す無線信号と撮像装置90からの球体移動装置10aの位置情報を示す無線信号を受信して移動指令/位置情報受信部41aに供給する。移動指令/位置情報受信部41aは、受信した信号に基づき外部から供給された移動指令や位置情報を移動制御部42aに供給する。
【0073】
また、移動指令/位置情報受信部41aには、発光デバイス(例えばLED)61〜66を順番に1つずつ点灯させる点滅駆動部51を接続する。点滅駆動部51は、発光デバイス61〜66を順番に1つ点灯させる。また、点滅駆動部51は、点灯している発光デバイスのUVW座標系における座標値を位置情報として移動指令/位置情報受信部41aに供給する。移動指令/位置情報受信部41aは、移動指令や位置情報を移動制御部42aに供給する。また、移動指令/位置情報受信部41aは、撮像装置で点灯した一点の座標が取得されたとき、この点灯した発光デバイスのUVW座標系における座標値を点灯情報として移動制御部42aに供給する。
【0074】
3軸加速度センサ49は、加速度検出結果を移動制御部42aに供給する。
【0075】
移動制御部42aは、球体移動装置10aの現在位置と移動指令と位置情報や点灯情報および加速度検出結果に基づき移動方向や移動量を決定して、決定した移動方向に移動量分だけ球体移動装置10を移動させるように、各電磁石で発生させる磁力を制御するための制御信号を生成して電磁石駆動部43に供給する。電磁石駆動部43は、移動制御部42から供給された制御信号に基づき電磁石21〜26を駆動して、球体移動装置10が決定した移動方向に移動量分だけ移動するように磁性流体を、電磁石21〜26で発生した磁力によって移動させる。
【0076】
発光デバイス61は電磁石21の位置に設ける。同様に、発光デバイス62〜66は電磁石22〜26の位置に設ける。発光デバイス61〜66は、点滅駆動部51からの駆動信号によって点滅動作を行い、球体移動装置10aの外部に光を放射する。
【0077】
[球体移動装置と接地面との間で滑りを生じる場合の移動動作]
図14は、球体移動装置10aおける駆動動作を示すフローチャートである。ステップST31で移動制御部42aは、移動位置を受信する。移動制御部42は、移動指令/位置情報受信部41aで受信された移動指令が示す移動位置を判別してステップST32に進む。この移動指令は、例えば移動位置(xn,yn)を示すものとする。
【0078】
ステップST32で移動制御部42aは、現在位置を受信する。移動制御部42aは、移動指令/位置情報受信部41aで受信された現在位置情報が示す現在位置を判別してステップST33に進む。この現在位置情報は、XY平面における球体移動装置10aの中央の座標値(xc0,yc0)を示すものである。
【0079】
ステップST33で移動制御部42aは、移動距離Lを算出する。移動制御部42は、球体移動装置10aの中央の座標値(xc0,yc0)と移動位置(xn,yn)から移動距離を算出してステップST34に進む。なお、移動距離Lは式(17)において「x0」を「xc0」、「y0」を「yc0」、「x1」を「xn」、「y1」を「yn」に置き換えれば算出できる。
【0080】
ステップST34で移動制御部42aは、移動距離Lが「L=0」であるか否か判別する。移動制御部42は、移動距離Lが「L=0」でないときステップST35に進む。また、移動距離Lが「L=0」であるときは、球体移動装置10aの中央の座標が移動位置となっていることから、移動制御部42aは移動動作を終了する。
【0081】
ステップST35で移動制御部42aは、点滅座標位置を受信する。移動制御部42aは、移動指令/位置情報受信部41aで受信された点滅位置情報が示す点滅座標位置を判別する。この点滅位置情報は、中央以外の点灯した一点の座標値(xc1,yc1)を示すものである。また、移動制御部42aは、点灯した一点である発光デバイスについてUVW座標系における座標値の判別も行ってステップST36に進む。
【0082】
ステップST36で移動制御部42aは、接地点の推定を行う。移動制御部42aは、3軸加速度センサ49で得られた加速度検出結果を用いて、球体移動装置10aにおける球状殻体11の接地点を推定してステップST37に進む。この推定した接地点の座標値は、UVW座標系における座標値(ub,vb,wb)とする。
【0083】
ステップST37で移動制御部42aは、姿勢行列Qの算出を行う。移動制御部42aは、球体移動装置10aの球状殻体11上における3点のXYZ座標系の座標値(xc0,yc0,r),(xc0,yc0,−r),(xc1,yc1,zc1)と、UVW座標系の座標値(ub,vb,wb),(−ub,−vb,−wb)、および点灯した一点におけるUVW座標系の座標(up1,vp1,wp1)から姿勢行列Qを算出してステップST38に進む。
【0084】
ステップST38で移動制御部42aは、移動方向角度βを算出する。移動制御部42aは、上述の式(2)〜(5)から移動方向角度βを算出してステップST39に進む。
【0085】
ステップST39で移動制御部42aは、移動距離Lが規定距離Ls以下であるか否か判別する。移動制御部42aは、移動距離Lが規定距離Ls以下であるときステップST40に進み、移動距離Lが規定距離Lsよりも大きいときステップST41に進む。
【0086】
ステップST40で移動制御部42aは、駆動距離Lmvとして移動距離Lを設定してステップST42に進む。
【0087】
ステップST41で移動制御部42aは、駆動距離Lmvとして規定距離Lsを設定してステップST42に進む。
【0088】
ステップST42で移動制御部42aは、駆動距離Lmv分の回転角度αmvを算出して、算出した回転角度αmvを回転角度αとしてステップST44に進む。
【0089】
ステップST43で移動制御部42aは、電磁石駆動処理を行う。移動制御部42aは、姿勢行列Qを用いて上述の式(14)の演算を行い移動目標点を設定する。また、移動制御部42aは、設定した移動目標点に応じて、駆動する電磁石および電磁石の駆動電流を決定する。さらに、移動制御部42aは、決定された駆動電流で電磁石を駆動する駆動動作を電磁石駆動部43で行わせて、電磁石で発生された磁力によって、球体移動装置10の重心の最下点が移動目標点(途中点)の位置になるように磁性流体15を移動させる。さらに、移動制御部42aは、電磁石の駆動制御を行ったのちステップST32に戻り、移動後の球体移動装置10aの位置である新たな現在位置情報を受信して、上述の処理を繰り返す。
【0090】
このように駆動動作を行うものとすれば、球体移動装置10aの中央の座標が移動位置となるまで、球体移動装置10aが駆動されるので、球体移動装置と接地面との間で滑りを生じる場合でも、球体移動装置10aを指示された位置に移動させることができる。
【0091】
<3.第3の実施の形態>
上述の第1および第2の実施の形態では、移動指令を示す無線信号を受信して球体移動装置の移動を行う場合について説明したが、球体移動装置の移動は、無線信号による移動指令に基づいて行う場合に限られるものではない。次に、センサの情報例えば光センサから得られた光検出情報に基づいて球体移動装置を移動させる場合について説明する。
【0092】
[球体移動装置の構成]
図15は、座標「V=0」の平面での断面の一部を示している。光センサ71は、外部からの照射光の強度を検出できるようにして、球状殻体11と電磁石21と間に設ける。また、外部からの光が球状殻体11を透過して光センサ71に入射されない場合、光を光センサ71に入射させるための貫通穴を球状殻体11に設ける。なお、貫通穴の穴径は、球体移動装置10aの転動が阻害されないように設定する。また、電磁石22〜26の位置にも同様に光センサ72〜76を設ける。光センサ71で検出された光強度は、強度G71とする。光センサ72〜76で検出された光強度は、強度G72〜G76とする。なお、強度G71〜76は、スカラー量である。
【0093】
ここで、球体移動装置10bの中心から光センサの取り付けられた位置に向かう方向のUVW座標系における向きを考慮すると、各光センサ71〜76で得られた強度と向きを含めたベクトルVTは、式(20)として示すことができる。
【0094】
VT=(G71−G73,G72−G74,G75−G76) --(20)
これは、UVW座標系における目標方向になるが、球体移動装置10bはZ軸方向には進めないので、ベクトルVTの接地面に対する水平成分だけを考える。
【0095】
XYZ座標系における−Z方向のベクトルは重力方向であるから、3軸加速度センサ49で得られた加速度検出結果を参照することで、UVW座標系における−Z方向を検出することが可能となる。
【0096】
図16は、球体移動装置10bにおける球状殻体11の移動方向の断面概略図を示している。ここで、3軸加速度センサ49からの加速度検出結果に基づいて判別した重力方向のベクトルを重力方向単位ベクトルesとすると、光センサ71〜76で得られた強度から求まるベクトルVTの重力方向(−Z方向)の成分は、重力方向単位ベクトルesとベクトルVTとの内積で算出できる。したがって、ベクトルVTのXY平面方向の成分を水平方向移動成分VTHとすると、水平方向移動成分VTHは式(21)から求めることができる(Z軸方向の成分VTZ=(es・VT)esを元のベクトルVTから引く)。
【0097】
VTH=VT−(es・VT)es --(21)
なお、(es・VT)は重力方向単位ベクトルesとベクトルVTとの内積であることを表している。
【0098】
さらに、水平方向移動成分VTHと、球体移動装置10bの接触点ベクトル(res)との和を進むべき方向として、この向きの球面上との交点を移動目標ベクトルVFTとすると移動目標ベクトルVFTは、式(22)から算出できる。
【0099】
【数10】
【0100】
なお、|VTH+res|はベクトル(VTH+res)の大きさを表している。
【0101】
これによりUVW座標系における、移動目標ベクトルVFTで求まり、移動目標ベクトルVFTが示す球面上の位置(目標接地点)PFTが、球体移動装置10bの最下点となるように電磁石21〜26を駆動し、磁性流体15を移動させて重心を変化させて、球体移動装置10bを転動させる。これにより、光センサ71〜76で取得した光の強度が強い方向に球体移動装置10bを移動させることができる。
【0102】
図17は、球体移動装置10bの機能ブロック図を示している。光センサ71〜76は、光の強度を検出して検出結果を、光センサ情報として移動制御部42bに供給する。また、3軸加速度センサ49は、加速度検出結果を移動制御部42bに供給する。
【0103】
移動制御部42bは、光センサ71〜76からの光センサ情報と3軸加速度センサ49からの加速度検出結果を用いて移動方向や移動量を決定して、決定した移動方向に移動量分だけ球体移動装置10bを移動させるように、各電磁石21〜26で発生させる磁力を制御するための制御信号を生成して電磁石駆動部43に供給する。電磁石駆動部43は、移動制御部42bから供給された制御信号に基づき電磁石21〜26を駆動して、球体移動装置10bが決定した移動方向に移動量分だけ移動するように磁性流体を、電磁石21〜26で発生した磁力によって移動させる。
【0104】
[球体移動装置の移動動作(光強度の強い方向に移動するとき)]
図18は、球体移動装置10bおける駆動動作を示すフローチャートである。ステップST51で移動制御部42bは、光センサ情報を取得してベクトルVTを算出する。移動制御部42bは、光センサ71〜76から光強度を示す光センサ情報を取得する。また、移動制御部42bは、取得した光センサ情報で示された強度G71〜G76を用いて式(20)からベクトルVTを算出してステップST52に進む。
【0105】
ステップST52で移動制御部42bは、重力方向単位ベクトルesの算出を行う。移動制御部42bは、3軸加速度センサ49からの加速度検出結果に基づいて重力方向単位ベクトルesを算出してステップST53に進む。
【0106】
ステップST53で移動制御部42bは、水平方向移動成分VTHの算出を行う。移動制御部42bは、ステップST51で算出したベクトルVTとステップST52で算出した重力方向単位ベクトルesを用いて式(22)の演算を行い、水平方向移動成分VTHを算出してステップST54に進む。
【0107】
ステップST54で移動制御部42bは、水平方向移動成分VTHの大きさが「0」であるか否かを判別する。移動制御部42bは、水平方向移動成分VTHの大きさが「0」でないときステップST55に進み、水平方向移動成分VTHの大きさが「0」あるときは、球体移動装置10bを停止する。
【0108】
ステップST55で移動制御部42bは、電磁石駆動処理を行う。移動制御部42bは、上述の式(22)の演算を行い、移動目標ベクトルVFTを算出して、移動目標ベクトルVFTが示す球面上の位置を目標接地点PFTとする。また、移動制御部42bは、設定した目標接地点PFTに応じて、駆動する電磁石および電磁石の駆動電流を決定する。さらに、移動制御部42は、決定された駆動電流で電磁石を駆動する駆動動作を電磁石駆動部43で行わせて、電磁石で発生された磁力によって、目標接地点PFTで接地するように磁性流体15を移動させる。移動制御部42aは、電磁石駆動処理を行ったのちステップST51に戻り、移動後の球体移動装置10bの位置で、新たに光センサ71〜76からの光センサ情報や3軸加速度センサ49からの加速度検出結果を取得して上述の処理を繰り返す。
【0109】
このように、球体移動装置10bにおける駆動動作を行うものとすれば、光強度の強い方向に球体移動装置10bを自動的に移動させることができる。例えば、球体移動装置10bに照明を当てることで、照明の光源に近づくように球体移動装置10bを移動させることができる。また、照明の光源方向とは異なる方向に球体移動装置10bを移動させるものとすれば、球体移動装置10bに光を当てたときに、光から逃れるように球体移動装置10bを移動させることも可能となる。
【0110】
<4.第4の実施の形態>
次に、センサの情報例えば音センサから得られた音検出情報を元に移動方向と量を決定して、球体移動装置を移動させる場合について説明する。
【0111】
[球体移動装置の構成]
図19は、座標「V=0」の平面での断面の一部を示している。音センサ81は、外部からの音の強度を検出できるようにして、球状殻体11と電磁石21と間に設ける。音センサ81は、例えば音声を収音するマイクを用いて構成する。また、外部からの音が球状殻体11を透過して音センサ81に届きにくい場合、音を通過させるための貫通穴を球状殻体11に設ける。なお、貫通穴の穴径は、球体移動装置10cの転動が阻害されないように設定する。また、電磁石22〜26の位置にも同様に音センサ82〜86を設ける。音センサ81で検出された音声レベルは、強度G71とする。音センサ82〜86で検出された音声レベルは、強度G72〜G76とする。このように音センサ81〜86で検出された音声レベルを強度G71〜G76とすると、光センサ71〜76で検出された光強度を強度G71〜G76とした場合と同様な処理を行うことで、音センサ81〜86で取得した音の強度が強い方向に球体移動装置10cを移動させることができる。
【0112】
図20は、球体移動装置10cの機能ブロック図を示している。音センサ81〜86は、音声レベルを検出して検出結果を、音センサ情報として移動制御部42cに供給する。また、3軸加速度センサ49は、加速度検出結果を移動制御部42cに供給する。
【0113】
移動制御部42cは、音センサ81〜86からの音センサ情報と3軸加速度センサ49からの加速度検出結果を用いて移動方向や移動量を決定して、決定した移動方向に移動量分だけ球体移動装置10cを移動させるように、各電磁石21〜26で発生させる磁力を制御するための制御信号を生成して電磁石駆動部43に供給する。電磁石駆動部43は、移動制御部42bから供給された制御信号に基づき電磁石21〜26を駆動して、球体移動装置10cが決定した移動方向に移動量分だけ移動するように磁性流体を、電磁石21〜26で発生した磁力によって移動させる。
【0114】
[球体移動装置の移動動作(音の強度の強い方向に移動するとき)]
図21は、球体移動装置10cおける駆動動作を示すフローチャートである。ステップST61で移動制御部42bは、音センサ情報を取得してベクトルVTを算出する。移動制御部42bは、音センサ81〜86から音の強度を示す音センサ情報を取得する。また、移動制御部42bは、取得した音センサ情報で示された強度G71〜G76を用いて式(20)からベクトルVTを算出してステップST62に進む。
【0115】
ステップST62で移動制御部42bは、重力方向単位ベクトルesの算出を行う。移動制御部42bは、3軸加速度センサ49からの加速度検出結果に基づいて重力方向単位ベクトルesを算出してステップST63に進む。
【0116】
ステップST63で移動制御部42bは、水平方向移動成分VTHの算出を行う。移動制御部42bは、ステップST61で算出したベクトルVTとステップST62で算出した重力方向単位ベクトルesを用いて式(22)の演算を行い、水平方向移動成分VTHを算出してステップST64に進む。
【0117】
ステップST64で移動制御部42bは、水平方向移動成分VTHの大きさが「0」であるか否かを判別する。移動制御部42bは、水平方向移動成分VTHの大きさが「0」でないときステップST65に進み、水平方向移動成分VTHの大きさが「0」あるときは、球体移動装置10cを停止する。
【0118】
ステップST65で移動制御部42bは、電磁石駆動処理を行う。移動制御部42bは、上述の式(22)の演算を行い、移動目標ベクトルVFTを算出して、移動目標ベクトルVFTが示す球面上の位置を目標接地点PFTとする。また、移動制御部42bは、設定した目標接地点PFTに応じて、駆動する電磁石および電磁石の駆動電流を決定する。さらに、移動制御部42は、決定された駆動電流で電磁石を駆動する駆動動作を電磁石駆動部43で行わせて、電磁石で発生された磁力によって、目標接地点PFTで接地するように磁性流体15を移動させる。移動制御部42aは、電磁石駆動処理を行ったのちステップST61に戻り、移動後の球体移動装置10cの位置で、新たに音センサ81〜86からの音センサ情報や3軸加速度センサ49からの加速度検出結果を取得して上述の処理を繰り返す。
【0119】
このように、球体移動装置10cにおける駆動動作を行うものとすれば、音の強度の強い方向に球体移動装置10cを自動的に移動させることができる。
【0120】
また、音の反射などの影響がある場合は、音の到達時刻の早さを音の強度のかわりに利用することで反射などの影響を回避して、直接到達する音の方向に球体移動装置10cを自動的に移動させることもできる。
【0121】
<5.第5の実施の形態>
上述の第1〜第4の実施の形態では、球状殻体11の中心を通る軸に対する慣性モーメントに大きく偏りがなく、球体移動装置を任意の方向に容易に転動させることができるように、電磁石や移動制御部および電磁石駆動部や電源部等を予め等しい重量に調整して、球状殻体11の内面に均等に配置して固定するものとしている。この場合、電磁石や各部の重量を等しく調整する作業が必要となる。また、電磁石や各部の重さを最も重量の重いものに合わせると、球体移動装置が重くなってしまう。そこで、電磁石や各部の重さの違い等によって、球状殻体11の中心を通る軸に対する慣性モーメントに偏りを生じる場合でも、磁性流体の移動を複雑に制御することなく、球体移動装置をスムーズに転動させる場合について説明する。
【0122】
図22は、第5の実施の形態についての動作原理を示している。図22の(A)は、球状殻体11の内部に設けられた移動制御部や電源部等の設置物91によって、球状殻体11の中心を通る軸に対する慣性モーメントに大きく偏りを生じている場合を示している。この場合、回転軸92を中心として球状殻体11を回転させると、設置物91が天頂部に達するまでは転動を抑制する力が作用し、天頂部を越えると転動を促進する力が作用する。そこで、図22の(B)に示すように、一部の磁性流体15aが設置物91と対向する位置に留まるように磁力を生じさせて、重心が球状殻体11の中心に近づくように、すなわち球状殻体11の中心を通る軸に対する慣性モーメントの偏りが小さくなるようにする。このように、一部の磁性流体15aが設置物91と対向する位置に留まるように磁力を発生させておけば、残りの磁性流体15bを上述の第1〜第4の実施の形態と同様にして移動させることで、磁性流体の移動を複雑に制御しなくとも、球体移動装置をスムーズに転動させることができるようになる。
【0123】
<6.第6の実施の形態>
図23〜図25は、球状殻体11の内部に支柱27を設けた場合を示している。球状殻体11の内部に支柱27を設けると、球状殻体11の強度を高めることができる。また、支柱27の内部に移動制御部や電磁石駆動部および電源部等を内蔵して、支柱27の端部に電磁石を設ければ、各部の接続や電磁石と電磁石駆動部との接続等が容易となり、球体移動装置を簡単に組み立てることができるようになる。
【0124】
図23は、支柱を設けた第1の構造を示している。なお、図23の(A)は支柱を設けたときの球体移動装置の内部構造、図23の(B)は球状殻体11の半球部分を切り取った状態を示す斜視図である。
【0125】
支柱27の端部には、電磁石を介した支柱27の支持機能と電磁石への駆動電流の供給経路となる機能を有する端子部27tを設ける。端子部27tは、支柱27の端部面から突出するように形成して、電磁石と端子部27tが接続された状態でも、電磁石と支柱の端部面との間に空隙を生じるようにする。
【0126】
図24は、支柱を設けた第2の構造を示している。なお、図24の(A)は球状殻体11の半球部分を切り取った状態を示す斜視図、図24の(B)は球状殻体11の半球部分を切り取った状態の側面図を示している。
【0127】
支柱27の端部面には電磁石を設けるものとして、支柱27の端部側面に支持脚27sを設ける。支持脚27sは、球状殻体11に当接して支柱27を球状殻体11の内部に固定するものである。また、支持脚27sは、電磁石よりも突出するように形成して、球状殻体11と支持脚27sが当接した状態でも、電磁石と球状殻体11との間に空隙を生じるようにする。
【0128】
図25は、支柱を設けた第3の構造を示している。なお、図25の(A)は支柱を設けたときの球体移動装置の内部構造、図25の(B)は球状殻体11の半球部分を切り取った状態を示す斜視図である。
【0129】
このように、電磁石と支柱の端部面との間、または電磁石と殻体との間に空隙を生じさせることで、空隙が設けられていない場合よりも、電磁石の部分に磁性流体が集まり易くなり、磁性流体の移動もスムーズとなる。
【0130】
第3の構造では、電磁石の部分に集まる磁性流体を多くできるように、電磁石とは異なる位置、例えば移動制御部42や電源部44,45等の位置に支柱27を設けた場合を示している。このように支柱27を設けると、電磁石の部分の空間が広くなることから、磁性流体の移動が第1の構造や第2の構造に比べて容易で、電磁石の部分に磁性流体が集まり易くなる。
【0131】
<7.第7の実施の形態>
図26は、重心移動装置を適用した姿勢制御装置における構成を示している。なお、図26の(A)は姿勢制御装置95の斜視図、図26の(B)は上面図、図26の(C)は位置「X=0」での断面を図26の(B)における矢印SA方向からみた側面図、図26の(D)は位置「X=0」での断面を、図26の(B)における矢印SB方向からみた側面図である。
【0132】
姿勢制御装置95は、球体の一部の曲面を持つ形状である例えば半球状殻体12を用いて構成する。半球状殻体12の内面には、複数の電磁石を固定して配置する。複数の電磁石は、半球状殻体12を任意の方向に容易に傾斜させることができるように、半球状殻体12の内面に均等に配置する。例えば3軸(X軸,Y軸,Z軸)の交点と半球状殻体12の中心を一致させたとき、3軸と半球状殻体12が交わる5つの点に、それぞれ等しい重さとされている電磁石21〜25を配置する。
【0133】
また、半球状殻体12の内面には、外部からの移動指令を受信する移動指令受信部41、受信された移動指令に応じて電磁石で発生させる磁力を制御する移動制御部42、移動制御部42からの制御信号に基づいて電磁石で磁力を発生させる電磁石駆動部43、各部を動作させるための電源部44を固定して配置する。
【0134】
このように姿勢制御装置95を構成すると、電磁石21〜25で発生させる磁力に応じて半球状殻体12の内部に設けた磁性流体(図示せず)が移動して、姿勢制御装置95の重心が変化する。このため、重心の変化に伴い姿勢制御装置95の姿勢が変化する。したがって、電磁石21〜25で発生させる磁力を制御して、姿勢制御装置95を所望の姿勢とすることができる。さらに、電磁石21〜25で発生させる磁力を制御して、磁性流体の移動を繰り返し行うものとすれば、姿勢制御装置95を所望の姿勢に設定できるだけでなく、揺動動作等も行うことが可能となる。
【0135】
なお、図26では、半球状殻体12を用いた場合について図示しているが、球体の一部の曲面を接地面とする形状であれば、姿勢制御装置95の殻体の形状は半球状に限られるものではない。
【0136】
<8.第8の実施の形態>
図27は、磁力の発生手段として永久磁石を用いた場合の構成を示している。永久磁石を用いる場合、永久磁石が球状殻体11の内面に固定されている状態では、磁力を変化させることができない。そこで、永久磁石を用いる場合、例えば永久磁石28を球状殻体11に内蔵させて、永久磁石駆動部29で永久磁石28を球状殻体11の中心方向に進退させることで、磁力を変化させる。
【0137】
このように永久磁石を用いる場合でも、磁力を制御可能な構成とすれば、電磁石を用いた場合と同様に、球体移動装置を転動させたり姿勢制御装置の姿勢を変化させることが可能となる。
【0138】
また、電磁石と永久磁石を組み合わせて用いるものとしてもよい。
【産業上の利用可能性】
【0139】
この発明によれば、球体または球体の一部の曲面を持つ形状で、球体面または前記曲面を接地面とする殻体の内部に流動性物質が設けられて、この流動性物質を殻体内で移動させることにより重心が所望の位置に移動される。このため、例えば回転動作や揺動動作あるいは姿勢変化を行う遊技機、搬送装置の駆動部等に適用することができる。
【図面の簡単な説明】
【0140】
【図1】球状移動装置の斜視図である。
【図2】球状移動装置の断面概略図である。
【図3】球状殻体の内面の配置図である。
【図4】第1の実施の形態の機能ブロック図である。
【図5】UVW座標系とXYZ座標系の関係を示す図である。
【図6】回転角度と移動方向角度を示す図である。
【図7】接地点が移動目標点の位置となったのち、さらに移動させる場合を示す図である。
【図8】第1の実施の形態における駆動動作を示すフローチャートである。
【図9】現在の姿勢を検出するための姿勢検出センサを設けた場合の構成を示す図である。
【図10】XYZ座標系における球体移動装置の位置を検出する構成を示す図である。
【図11】発光部を設けた場合を示す図である。
【図12】撮像装置で取得できる情報を説明するための図である。
【図13】第2の実施の形態の機能ブロック図である。
【図14】第2の実施の形態の駆動動作を示すフローチャートである。
【図15】電磁石の位置に光センサを設けた場合を示す図である。
【図16】球体移動装置における移動方向の断面概略図である。
【図17】第3の実施の形態の機能ブロック図である。
【図18】第3の実施の形態の駆動動作を示すフローチャートである。
【図19】電磁石の位置に音検出センサを設けた場合を示す図である。
【図20】第4の実施の形態の機能ブロック図である。
【図21】第4の実施の形態の駆動動作を示すフローチャートである。
【図22】第5の実施の形態の動作原理を説明するための図である。
【図23】殻体に支柱を設けたときの第1の構造を示す図である。
【図24】殻体に支柱を設けたときの第2の構造を示す図である。
【図25】殻体に支柱を設けたときの第3の構造を示す図である。
【図26】姿勢制御装置の構成を示す図である。
【図27】永久磁石を用いた場合の構成を示す図である。
【符号の説明】
【0141】
10,10a,10b,10c・・・球体移動装置、11・・・球状殻体、12・・・半球状殻体、15,15a,15b・・・磁性流体、21〜26・・・電磁石、27・・・支柱、27s・・・支持脚、27t・・・端子部、28・・・永久磁石、29・・・永久磁石駆動部、40,40a・・・アンテナ、41・・・移動指令受信部、41a・・・移動指令/位置情報受信部、42,42a,42b,42c・・・移動制御部、43・・・電磁石駆動部、44〜48・・・電源部、49・・・3軸加速度センサ、51・・・点滅駆動部、61〜66・・・発光デバイス、71〜76・・・光センサ、81〜86・・・音センサ、90・・・撮像装置、91・・・設置物、92・・・回転軸、95・・・姿勢制御装置
【特許請求の範囲】
【請求項1】
球体または球体の一部の曲面を持つ形状で、球体面または前記曲面を接地面とする殻体と、
前記殻体内に設けられた流動性物質と、
前記殻体内に設けられて、前記流動性物質を移動させる流動性物質駆動部と、
前記殻体内に設けられて、前記流動性物質駆動部を制御して、前記流動性物質を移動させることにより所望の位置に重心を移動させる移動制御部と
を備える重心移動装置。
【請求項2】
前記流動性物質は磁性流体であり、
前記流動性物質駆動部は、複数の磁石と、該磁石の磁力を制御する磁石駆動部で構成した
請求項1記載の重心移動装置。
【請求項3】
前記複数の磁石は、前記殻体の内面に均等に配置した
請求項2記載の重心移動装置。
【請求項4】
前記移動制御部は、外部からの指令に基づき前記磁性流体の移動に用いる磁石と磁力を決定して、該決定に基づき前記磁石駆動部で前記磁石を駆動させる
請求項3記載の重心移動装置。
【請求項5】
前記外部からの指令は、移動位置を示す位置情報であり、
前記移動制御部は、現在位置と前記移動位置から前記移動位置の方向および移動位置までの距離を判別して、該判別結果に応じて前記磁石と磁力の決定を行う
請求項4記載の重心移動装置。
【請求項6】
前記移動制御部は、現在位置から前記移動位置までの距離が所定距離よりも長いとき、前記所定距離に応じた前記磁石と磁力の決定を行って前記磁性流体を移動させる処理を繰り返す
請求項5記載の重心移動装置。
【請求項7】
前記移動制御部は、前記殻体上における接地点の位置と、接地面上における前記殻体の中心位置と、前記殻体上における一点の位置と、該一点の前記接地面上における位置を取得して、該取得した位置から前記殻体の姿勢を判別し、姿勢の判別結果と現在位置と前記移動位置から前記移動位置の方向および移動位置までの距離を判別して、該判別結果に応じて前記磁石と磁力の決定を行う
請求項6記載の重心移動装置。
【請求項8】
前記殻体に照射された光の強度を検出する光センサを前記殻体に複数配し、
前記移動制御部は、前記殻体に照射された光を前記外部からの指令として、前記光センサの検出結果に基づいて判別した光の強度が強い方向に応じて前記磁石と磁力の決定を行う
請求項4記載の重心移動装置。
【請求項9】
音を収音する音センサを前記殻体に複数配し、
前記移動制御部は、前記音を前記外部からの指令として、前記音センサの検出結果に基づいて判別した音の方向に応じて前記磁石と磁力の決定を行う
請求項4記載の重心移動装置。
【請求項10】
前記殻体の内部に支柱を設け、該支柱によって前記殻体の内面を支持する
請求項3記載の重心移動装置。
【請求項11】
前記支柱の端部に前記磁石と接続される端子部を突出して設け、前記端部と前記磁石との間に空隙を生じた状態で前記殻体の内面を前記端子部によって前記磁石を介して支持する
請求項10記載の重心移動装置。
【請求項12】
前記支柱の端部に前記磁石と端部から突出した支持脚を設け、前記磁石と前記殻体の内面との間に空隙を生じた状態で前記殻体の内面を前記支持脚で支持する
請求項10記載の重心移動装置。
【請求項13】
前記支柱は、前記殻体の内面の前記磁石が設けられていない位置を支持する
請求項10記載の重心移動装置。
【請求項14】
前記重心を移動させる際に、前記複数の磁石における所定の磁石で磁力を発生させて前記磁性流体の一部を吸着させておくことで、慣性モーメントの偏りを補正する
請求項3記載の重心移動装置。
【請求項15】
球体または球体の一部の曲面を持つ形状で球体面または前記曲面を接地面とする殻体において、前記殻体の内部に設けられている流動性物質を前記殻体の内部に設けられている流動性物質駆動部によって移動させるステップと、
前記殻体の内部に設けられている移動制御部によって、前記流動性物質駆動部を制御して、前記流動性物質を移動させることにより所望の位置に重心を移動させるステップとを具備する重心移動方法。
【請求項1】
球体または球体の一部の曲面を持つ形状で、球体面または前記曲面を接地面とする殻体と、
前記殻体内に設けられた流動性物質と、
前記殻体内に設けられて、前記流動性物質を移動させる流動性物質駆動部と、
前記殻体内に設けられて、前記流動性物質駆動部を制御して、前記流動性物質を移動させることにより所望の位置に重心を移動させる移動制御部と
を備える重心移動装置。
【請求項2】
前記流動性物質は磁性流体であり、
前記流動性物質駆動部は、複数の磁石と、該磁石の磁力を制御する磁石駆動部で構成した
請求項1記載の重心移動装置。
【請求項3】
前記複数の磁石は、前記殻体の内面に均等に配置した
請求項2記載の重心移動装置。
【請求項4】
前記移動制御部は、外部からの指令に基づき前記磁性流体の移動に用いる磁石と磁力を決定して、該決定に基づき前記磁石駆動部で前記磁石を駆動させる
請求項3記載の重心移動装置。
【請求項5】
前記外部からの指令は、移動位置を示す位置情報であり、
前記移動制御部は、現在位置と前記移動位置から前記移動位置の方向および移動位置までの距離を判別して、該判別結果に応じて前記磁石と磁力の決定を行う
請求項4記載の重心移動装置。
【請求項6】
前記移動制御部は、現在位置から前記移動位置までの距離が所定距離よりも長いとき、前記所定距離に応じた前記磁石と磁力の決定を行って前記磁性流体を移動させる処理を繰り返す
請求項5記載の重心移動装置。
【請求項7】
前記移動制御部は、前記殻体上における接地点の位置と、接地面上における前記殻体の中心位置と、前記殻体上における一点の位置と、該一点の前記接地面上における位置を取得して、該取得した位置から前記殻体の姿勢を判別し、姿勢の判別結果と現在位置と前記移動位置から前記移動位置の方向および移動位置までの距離を判別して、該判別結果に応じて前記磁石と磁力の決定を行う
請求項6記載の重心移動装置。
【請求項8】
前記殻体に照射された光の強度を検出する光センサを前記殻体に複数配し、
前記移動制御部は、前記殻体に照射された光を前記外部からの指令として、前記光センサの検出結果に基づいて判別した光の強度が強い方向に応じて前記磁石と磁力の決定を行う
請求項4記載の重心移動装置。
【請求項9】
音を収音する音センサを前記殻体に複数配し、
前記移動制御部は、前記音を前記外部からの指令として、前記音センサの検出結果に基づいて判別した音の方向に応じて前記磁石と磁力の決定を行う
請求項4記載の重心移動装置。
【請求項10】
前記殻体の内部に支柱を設け、該支柱によって前記殻体の内面を支持する
請求項3記載の重心移動装置。
【請求項11】
前記支柱の端部に前記磁石と接続される端子部を突出して設け、前記端部と前記磁石との間に空隙を生じた状態で前記殻体の内面を前記端子部によって前記磁石を介して支持する
請求項10記載の重心移動装置。
【請求項12】
前記支柱の端部に前記磁石と端部から突出した支持脚を設け、前記磁石と前記殻体の内面との間に空隙を生じた状態で前記殻体の内面を前記支持脚で支持する
請求項10記載の重心移動装置。
【請求項13】
前記支柱は、前記殻体の内面の前記磁石が設けられていない位置を支持する
請求項10記載の重心移動装置。
【請求項14】
前記重心を移動させる際に、前記複数の磁石における所定の磁石で磁力を発生させて前記磁性流体の一部を吸着させておくことで、慣性モーメントの偏りを補正する
請求項3記載の重心移動装置。
【請求項15】
球体または球体の一部の曲面を持つ形状で球体面または前記曲面を接地面とする殻体において、前記殻体の内部に設けられている流動性物質を前記殻体の内部に設けられている流動性物質駆動部によって移動させるステップと、
前記殻体の内部に設けられている移動制御部によって、前記流動性物質駆動部を制御して、前記流動性物質を移動させることにより所望の位置に重心を移動させるステップとを具備する重心移動方法。
【図1】

【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図9】

【図10】
【図11】
【図12】

【図13】
【図14】

【図15】

【図16】

【図17】
【図18】
【図19】
【図20】
【図21】

【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公開番号】特開2010−76707(P2010−76707A)
【公開日】平成22年4月8日(2010.4.8)
【国際特許分類】
【出願番号】特願2008−249954(P2008−249954)
【出願日】平成20年9月29日(2008.9.29)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成22年4月8日(2010.4.8)
【国際特許分類】
【出願日】平成20年9月29日(2008.9.29)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]