
Fターム[2C150ED67]の内容
Fターム[2C150ED67]に分類される特許
1 - 20 / 20
移動装置

【課題】振動モータを用いて簡易かつ正確に移動体を回転または移動させる。
【解決手段】移動装置1は、回転軸5に偏って取り付けられる錘部材6を有する振動モータ2と、振動モータ2が取り付けられ、振動モータ2と共に移動可能な移動体3と、移動体3が錘部材6の慣性力により所定方向に移動するように、錘部材6が所定の回転位置のときに振動モータ2を減速させるか停止させる回転制御部4と、を備える。振動モータ2の錘6が所定位置まで回転したときに、振動モータ2の回転を減速または停止させると、錘6に慣性力が働くことに着目し、この慣性力を利用して移動装置1を所望の方向に移動させるため、振動モータ2が1個だけの場合でも、移動装置1を左右の方向に移動させることができる。
(もっと読む)
ハチドリ型羽ばたき飛翔ロボット

【課題】より空気力の損失を少なく、また正確かつ安定的な飛行が可能となるハチドリ型羽ばたき飛翔ロボットを提供する。
【解決手段】ハチドリ型羽ばたき飛翔ロボット1は、本体部材2と、この本体部材2に配置される複数の主翼部材3と、この主翼部材3を駆動する主翼駆動部材4、尾翼部材5及び重り61を有しこの重り61の移動を行う重り移動部材6と、を有することを特徴とする。なおこの場合において、重り移動部材6は、主翼部材3と、尾翼部材5の間に配置されていることが好ましい。
(もっと読む)
揺動玩具
【課題】揺動体の基台への組付けが容易で且つ回転抵抗をも低減することができる揺動玩具を提供すること。
【解決手段】基台と、前記基台によって水平に支持され少なくとも支持される部分が丸棒状の軸と、前記軸に固定され前記基台に対して当該軸を中心に揺動可能な揺動体と、を備える揺動玩具であって、前記基台には、弾性変形可能な丸棒状の2つの弾性線材と、当該2つの弾性線材の両端部を中間部が下方に撓むことを許容するよう支持する線材支持部とが設けられ、前記弾性線材は、前記軸に直交する方向に延在し、前記中間部に載置された当該軸の軸方向に離れた2つの部分を下方から支持し、当該中間部は前記揺動体の荷重によって曲げ作用を受けて弾性変形して下方に撓むように構成されている。
(もっと読む)
姿勢制御付き無人二輪車
【課題】 無人二輪車の走行において、車体の傾斜角速度と旋回角速度を検出して傾斜角、傾斜角速度、旋回角速度及び走行速度を要素とする操舵角を算出し、この操舵角で転倒も蛇行もしないように走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
(もっと読む)
重心移動装置と重心移動方法
【課題】 重心移動を簡単な構成で容易に行えるようにして、球体の転動等を容易に可能とする。
【解決手段】球状の殻体11の内部に、流動性物質である磁性流体15を設ける。球状殻体11の内面には、電磁石21〜26を均等に配置する。電磁石21〜26で発生させる磁力を制御して、磁性流体15を移動させることにより、重心を所望の位置に移動できるようにする。磁性流体15を移動させるだけで重心を移動できることから、構成が簡単となる。また、重心の移動も容易である。さらに、重心を所望の位置に移動させることで、所望の姿勢とすることができる。また、所望の位置への重心の移動を繰り返し行うものとすれば、球体を転動させることも簡単な構成で容易に実現できる。
(もっと読む)
移動体による眼力トレーニング装置
【課題】 自宅や事務所の就寝時や休憩時に簡単に、低コストで自然に眼力の訓練ができるようにする。
【解決手段】 天井から紐に吊るした玩具飛行体を床上に位置する観察者が観察する。玩具飛行体は紐に吊るされた状態で推力と重力と揚力の動的な釣り合いで定まる旋回飛行をし、その後玩具飛行体は、次第に速度を速め旋回半径が次第に増大し、床面からの高度が次第に高くなり、その後次第に速度が遅くなり旋回半径が次第に小さくなり、床面からの高度が次第に低くなり、更に、紐が玩具飛行体内に次第に巻き取られ、紐が次第に短くなり、玩具飛行体は床面からの高度が次第に高くなり、紐の長さに拘束されて旋回半径が次第に小さくなり、次に紐が玩具飛行体内から巻き戻され、紐が次第に長くなり、床面からの高度が次第に低くなり、紐の長さに比例して旋回半径がやや大きくなり、当該玩具飛行体が前記旋回飛行を繰り返し、観察者が目で該玩具飛行体を観察する。
(もっと読む)
振動移動装置
【課題】 ギヤやリンク等の部品を使用することなく、きわめて簡単な機構で移動を可能とする振動移動装置を提供する。
【解決手段】 移動体本体11と、移動体本体11に備えられ、移動体本体11の外周に沿って進行する振動波を発生させる振動発生手段17と、振動発生手段17の動作を制御する制御手段15と、移動体本体11に取り付けられる弾性を有する複数の支持手段21と、支持手段21の下部側に設けられ、方向によって接地面Gとの摩擦抵抗の異なるソール部材23とを備え、振動発生手段17によって移動体本体11の外周に沿って進行する振動波を発生させることにより、支持手段21を介して接地面Gに作用する振動波の反作用によって移動体本体11を移動させることを特徴とする。
(もっと読む)
脚式移動ロボット
【課題】胴体に可動脚を連結して構成された、優れた脚式移動ロボットを提供する。
【解決手段】胴体後方の上端に取っ手を配置し、歩行中や脚式作業中や暴走中には、オペレータは機体の後方からロボットを追いかけて、取っ手を把持することによって容易に捕まえることができる。また、取っ手を操作中に万一足部や腕部が暴走しても、取っ手を掴むオペレータの腕に危害を被る心配がない。また、取っ手の把持部分は緊急停止機構を兼ね備えており、オペレータが取っ手を把持することを検出すると、全身の関節アクチュエータを脱力させる。
(もっと読む)
重心力利用の自動水平制御装置
【課題】水平制御盤の組み合わせで、左右、前後の全傾斜方向に対して水平制御を機能する重心力利用の自動制御装置を提供する。
[0010]
【解決手段】水平制御盤の外郭固定フレームには支持軸を突出して設け、さらに水平制御盤の正面の軸受板を内郭回動フレームに貼着して設け、軸受板には振り子板を固定し、振り子板先端を重力体として内郭回動フレームの回動運動に連動させ、又、水平制御盤は外郭フレームより外側方向に位置して重力体を機能させる構造とする。
(もっと読む)
ロボットシステム
【課題】 軽量簡便なシステムで、静止状態または動作中にかかわらず安定な姿勢が保たれるロボットシステムを提供する。
【解決手段】 複数の体節3と、前記体節同士をつなぐ関節4と、前記関節を駆動する駆動装置5と、前記駆動装置を制御する制御装置8と、前記体節、関節、駆動装置または制御装置のうち少なくとも一つに設けられ、外界より比重の軽い流体が注入された浮嚢2を有し、浮心と重心が異なり、外界に対する比重が1以上であることを特徴とするロボットシステム。
(もっと読む)
潜水ビークル
船体軸を画定するとともに船体軸に沿って見た時に略環状を呈する外側船体を有する潜水ビークルであり、環状体の内部は、ビークルが液体に潜水する時に液体がダクトを満たすように、両端部で開口したダクトを画定する。ビークルはさらに、船体軸を中心にビークルを転回させるための手段を含む。浮力制御システムが設けられ、外側船体は船体軸に対して後傾している。ビークルを出動および使用する様々な方法が記載される。 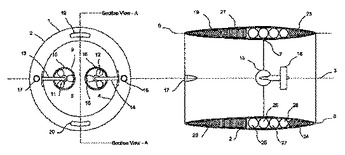 (もっと読む)
(もっと読む)
水の気化熱エンジン
【課題】揮発性の液体の温度変化による蒸気圧変化に起因した液体移動により生じる反復運動を利用して、使いやすく、かつ、用途をより拡大できるコップの要らない反復運動体を提供することである。更に、近未来、反復運動体としての玩具に止まらず、動力の取り出せる水の気化熱エンジンを提供することにある。
【解決手段】管状の首部の一端は内部に揮発性の液体を密封した胴部に挿入定着され、該首部の他端はふくれて閉じられた頭部になっており、かつこれらから構成される反復運動体の近傍に液体を入れるサイホン式給水タンクが別置きされ、さらにその液体を頭部に導く特殊導水体を設けたことを特徴とする従来のようなコップが要らない水の気化熱エンジンとした。
(もっと読む)
浮遊体
【課題】羽根をつけたり中央に穴を形成したりする必要がなく、デザインの自由度が高くて自然な形態とすることができ、空中に安定して浮遊させることができる浮遊体1を提供する。
【解決手段】軽い材質の材料によって適宜形状に形成された浮遊体本体1aの下部に重錘2を設け、上方に吹き上げられた空気流5によって空中で浮遊することを特徴とする。なお、上記浮遊体本体1aと重錘2とを軸状又は帯板状の連結手段3で連結したことを特徴とする。
(もっと読む)
脚式ロボット
【課題】股関節軸、膝関節及び足関節軸にある各プーリに弾性力を作用させ、各プーリを連結し、該プーリ同士の大きさを調節することによって、加速度センサ、角速度センサ、力センサ等のセンサを利用する制御系を使用することなく、脚の機構的構造自体によって安定性を実現することができ、センサや制御系の故障による影響を受けず、信頼性が高く、構造が簡素で、コストを低くすることができるようにする。
【解決手段】股関節軸、膝関節軸及び足関節軸の各々の変位角に比例する関節軸トルクを発生する弾性要素と、股関節軸において腰部リンクに固定されたプーリと膝関節軸において脛部リンクに固定されたプーリとに弾性力を作用する弾性要素と、膝関節軸において腿部リンクに固定された小径プーリと、足関節軸において足部リンクに固定された大径プーリと、小径プーリの円周部と大径プーリの円周部とを連結するワイヤとを有する。
(もっと読む)
ポータブルデバイス
【課題】
【解決手段】ポータブルデバイスは、振動を提供するモータ、このモータに動力を供給する動力源、前記モータの方向を制御するスイッチデバイス、面に係合してモータが振動するときにデバイスを推進する推進手段であって、垂直方向に対して角度を成して下方に延在する推進手段、及び前記スイッチデバイスに接続されている入力デバイスを具え、前記スイッチデバイスは入力デバイスが所定の信号を受信すると前記モータの方向を切りかえるように構成されている。有利なことに、推進手段は一セットの毛を具える。角度を付けた毛を使用することで、後方向の摩擦が増加し、振動したときに前記デバイスを前方へ動かす。振動が物体を後方へ移動させようとすると、この毛が面に食い込み、振動が物体を前方へ移動させようとすると、毛が面上を摺動する。
(もっと読む)
脚式歩行ロボット並びにその静的バランス制御方法
【課題】 静的バランスのくずれを、チューニング等の煩雑な分解作業を行うことなく、外部からの簡単な操作で調整して修正することのできる脚式歩行ロボット、並びに脚式歩行ロボットの静的バランス制御方法をを提供する。
【解決手段】 ロボット外表面を覆う柔軟なウェア4に、流体を充填することが可能な多数の密室空洞部5を設けて、選択した密室空洞部に充填する流体の量を加減することによりロボットの静的バランスを制御するようにした脚式歩行ロボット並びにその静的バランス制御方法の構成。
(もっと読む)
無人ヘリコプタの重量物配置構造
【課題】 空気抵抗を小さくして出力損失を軽減し、安定した飛行制御が可能な無人ヘリコプタの重量物配置構造を提供する。
【解決手段】 地上からのリモコン操作によるマニュアル飛行制御及び機体に搭載した自律制御装置による自律飛行制御が可能な無人ヘリコプタ1において、機体4の左右外側のうち一方のみに、重量物を搭載した。前記重量物は、例えば前記自律制御装置を収納した自律制御ボックス15である。
(もっと読む)
飛行体
【課題】スタビライザ等の姿勢安定化手段を設けることなく安定した飛行を行なうことができ、軽量化に有利であり、また、太陽電池と回路部との間、超音波モータと回路部との間における電圧降下や電力の損失を低減することができる飛行体を提供する。
【解決手段】本発明の飛行体は、複数の回転翼を有するロータと、前記ロータを回転可能に支持する軸とを備え、前記回転翼の回転により生じる推力により飛行する飛行体であって、前記ロータに、太陽電池71と、接触部および圧電素子を備えた振動体4を有する超音波モータと、充電部および駆動回路を有する回路部とが設けられており、前記振動体4は、前記駆動回路によって前記圧電素子に交流電圧を印加することにより振動し、この振動により、前記接触部を介して前記軸の外周部に力を繰り返し加え、該軸の外周部から受ける反力により該振動体4自身と共に前記ロータ3を回転させるよう構成されている。
(もっと読む)
小物入れ容器
【目的】種々の小物を収容する球形または略球形を基本形状とした小物入れに関して、適宜な錘材を利用して安定性を向上すると共に独特な動きも実現して従来にない趣味性を満足する新製品を提供する。
【構成】少なくとも下部容器1bが半球形状である上下に2分割された球形または略球形の容器1であって、下部容器1bの底部に錘取付け部が形成されており、取付けられた錘2の重量によって球形または略球形の容器1全体が外部からの力によっては容易に転がらず、ゆらゆら揺れ動くように配慮されている小物入れ容器。
(もっと読む)
リモコン二輪車のロール角制御装置
操縦者の操縦操作を容易にすることができ、広い速度域でリモコン二輪車の姿勢を安定させることができる、リモコン二輪車のロール角制御装置を提供するために、ロール角制御装置21を設けた。ロール角制御装置21は、車体本体のロール角を検出するロール角検出手段35と、操舵軸又はフロントフォークに左右方向の回転トルクを付加する操舵用アクチュエータ13と、ロール角検出値とリモコン受信機からのロール角目標値とに基づき操舵用アクチュエータに対する操作量を出力してロール角検出値をロール角目標値に近付けるように制御する制御手段29と、少なくとも中立点を境にして舵角が左右の何れに切れているかを検出する舵角検出手段50とを備え、前記制御手段29によって、舵角検出手段にて検出した舵角が右切れ方向の場合には右回転トルクを付加し、舵角検出手段にて検出した舵角が左切れ方向の場合には左回転トルクを付加するような信号を、操舵用アクチュエータに対する操作量に付加するように制御するキャスタ効果制御手段51を構成した。  (もっと読む)
(もっと読む)
1 - 20 / 20
[ Back to top ]