
株式会社IHIにより出願された特許
2,081 - 2,090 / 5,014
大型枠組構造物の溶接ロボット装置
【課題】パネル上にロンジとトランスが交差している大型の枠組構造物の交差部を本溶接することができ、本溶接が可能な溶接部位の制約が少なく、人手に頼る手溶接がほとんど不要であり、大型ガントリ構造による従来のマルチロボット溶接装置と比較して装置全体を小型化でき、複雑な制御システムが不要である大型枠組構造物の溶接ロボット装置を提供する。
【解決手段】1対のロンジ2と1又は1対のトランス3で囲まれた升目形状の枠内を溶接対象領域4とし、溶接対象領域4を跨いで大型枠組構造物に固定され溶接対象領域の上部に位置する水平支持架台12を有するロボット架台10と、水平支持架台12の下面に取付けられ升目形状枠内(溶接対象領域4)の全域にわたり溶接ヘッドを3次元的に数値制御して溶接可能な溶接ロボット20とを備える。
(もっと読む)
ストッカ制御システム及びストッカ制御方法

【課題】荷の重量によって倉庫施設内の保管場所を決定し、荷を効率よく搬入搬出して省エネルギーを図るストッカ制御システムを提供する。
【解決手段】荷の重量情報を少なくとも含む荷情報を記憶する荷情報記憶装置20と、倉庫施設の荷を保管可能な場所についての保管可能場所情報を少なくとも含む保管場所情報を記憶する保管場所情報記憶装置21と、荷情報及び保管場所情報を取得し、重量情報から荷重量による重みと保管可能場所情報から荷の移動負荷に対する重みとを算出して、荷重量による重みと移動負荷に対する重みを加算する重み付け法により総重みを算出し、総重みによって荷を保管する荷保管場所を決定する保管場所決定部10とを備える。
(もっと読む)
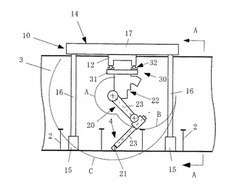
ワーク設置装置とワーク設置方法
【課題】 わずかに位置誤差があってもワーク搬送装置のロボットハンドが被設置部材に干渉することなくワークを把持、搬送することができるとともに、ワークに把持部を設けなくても搬送できるワーク設置装置とワーク設置方法を提供することである。
【解決手段】 3次元的に移動可能な把持機構5に取り付けられ、水平方向に移動可能であり、その間に外周面1bを開放可能に把持可能な複数のツメ部材12と複数のツメ部材12を互いに連動して水平方向に駆動する開閉アクチュエータ14とを備える。ツメ部材12はワーク1の外周面1bを把持する把持面12bと水平な底面1cを支持する支持面12cとを有する。被設置部材2は、上端部に案内テーパ面2bを有しワーク1の外周面1bと嵌合する嵌合部2aと、ワーク1の底面1cを支持する底面支持部2cと、ワーク1が鉛直に下降してその底面1cが底面支持部2cに載る位置まで複数のツメ部材12と干渉しないように設けられた切り欠き溝2dとを有する。
(もっと読む)
三次元免震装置
【課題】液圧シリンダに対し曲げモーメントが作用することを防止でき且つ積層ゴムが剪断座屈を起こしにくくすることができ、免震性能向上を図り得る三次元免震装置を提供する。
【解決手段】一個の積層ゴム1に対し、その軸線Oを中心に対称となるよう複数の液圧シリンダ3を配設し、各液圧シリンダ3には、アキュムレータ2に接続される鉛直荷重支持用液室3cと、ピストン3dにて上下に仕切られる曲げ支持用上液室3e及び曲げ支持用下液室3fとを形成し、液圧シリンダ3の曲げ支持用上液室3eと、該液圧シリンダ3に対応する別の液圧シリンダ3の曲げ支持用下液室3fとを連通路7aにて接続すると共に、液圧シリンダ3の曲げ支持用下液室3fと、該液圧シリンダ3に対応する別の液圧シリンダ3の曲げ支持用上液室3eとを連通路7bにて接続することにより、各液圧シリンダ3を同位相で動作させるよう構成する。
(もっと読む)
気液攪拌装置
【課題】液体内における気泡の滞留時間を従来よりも長くすることにより、気体の液体への溶け込み量を増大させる。
【解決手段】液体を貯留する攪拌槽1と、攪拌槽1内に気泡を噴出する散気部7と、攪拌槽1内に垂下された駆動軸2と、駆動軸2に多段に設けられた複数の攪拌翼3A、3Bとを備え、各段の攪拌翼3A、3Bは、互いに異なる方向の力を液体に与える。
(もっと読む)
継手構造
【課題】FRP製の上部構体を破損させることなく台枠に結合することができる継手構造を提供する。
【解決手段】軌道系交通車両10が台枠2とその台枠2上に設けられた上部構体3とを有し、その上部構体3が、上記台枠2から上方に延びる芯材41の内面と外面とを繊維強化複合材料からなるスキン材5で覆って形成されたサンドイッチ構造体6を有し、そのサンドイッチ構造体6を締結部材7により上記台枠2に結合するための継手構造1であって、上記芯材41と上記台枠2との間に上記芯材41の下端から上記台枠2の側面まで延びる金属製のフレーム材8を設けると共に、そのフレーム材8の内面と外面とを上記スキン材5で覆ってサンドイッチ構造の結合部9を形成し、その結合部9を上記締結部材7により上記台枠2の側面に固定したものである。
(もっと読む)
ワーク加工装置とその制御方法
【課題】鋳鉄等の硬い材質のワークを加工する場合に、衝撃的な加工反力が発生しても加工精度を維持しかつ工具の破損等を防止することができるワーク加工装置とその制御方法を提供する。
【解決手段】3次元的に移動可能なロボットハンド4に取り付けられ、これに作用する外力を検出する力センサ12と、力センサに取り付けられワーク1の外面を倣う倣い部材15を有する倣い治具14と、倣い治具に取り付けられワークを加工する加工工具16と、倣い治具のワーク外面に対する倣い治具押付力Fallを予想される加工反力Rの最大値よりも大きい値に力制御する加工制御装置20とを備える。倣い部材14でワーク1の外面を倣いながら倣い治具14をワークの外面に沿って移動し、加工工具16によりワーク1を加工する。
(もっと読む)
シールド掘進機のマンロック装置
【課題】シールド掘進機の機長を延長することなく、中小口径のシールド掘進機に設置可能なマンロック装置を提供する。
【解決手段】シールド掘進機1のシールドフレーム3の内周に沿って組立が可能で且つ解体が可能な隔壁取付セグメント34と、隔壁取付セグメント34に着脱可能に取り付けられ、シールドフレーム3内を前後に区画する圧力隔壁36と、圧力隔壁36に装着されるマンロック37とを備え、マンロック37は、気圧調節可能な気圧調節室43と、気圧調節室43と圧力隔壁36後方の空間とを連通する開口44を開閉する第一扉45と、気圧調節室43と圧力隔壁36前方の空間とを連通する開口46を開閉する第二扉47とを有する。
(もっと読む)
軌道系交通車両
【課題】上部構体の軽量化及び強度の向上が図れる軌道系交通車両を提供する。
【解決手段】台枠2上に上部構体4を取付けた軌道系交通車両において、上部構体4の少なくとも天井部4a及び窓下側板部4bが芯材3を繊維強化プラスチックのスキン11,12で一体的に挟んでなるサンドイッチ材により形成されていると共に、少なくともドア用の開口部7の周囲に補強フレーム10が組み込まれている。
(もっと読む)
車両
【課題】軌道に沿って配置された地上子から位置信号を受信できなかった場合でも安全性を確保しつつ走行を継続可能であると共に、システム全体のAvailabilityの低下を防止することの可能な車両を提供する。
【解決手段】軌道に沿って配置された地上子上を通過する際に前記地上子から受信した位置信号を基に絶対位置を認識し、前記絶対位置を起点とする走行距離から現在位置を算出する機能を有する車両であって、測位用情報を含む電波を受信し、前記測位用情報に基づいて現在位置を算出する測位電波受信機と、前記地上子から位置信号を受信できなかった場合、前記測位電波受信機で算出された現在位置を基に前記走行距離から算出された現在位置が許容範囲内か否かを判定し、許容範囲内である場合には制限条件付きで走行を継続するように運転制御を行う車両制御装置とを備える。
(もっと読む)
2,081 - 2,090 / 5,014
[ Back to top ]