
本田技研工業株式会社により出願された特許
1,071 - 1,080 / 23,863
金属酸素電池及びそれに用いる酸素貯蔵材料の製造方法
【課題】正極材料としてYMnO3からなる酸素貯蔵材料を用いると共に、過電圧を低下させることができる金属酸素電池を提供する。
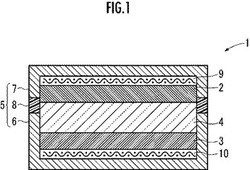
【解決手段】金属酸素電池1は、酸素を活物質とする正極2と、金属リチウムを活物質とする負極3と、正極2と負極3とに挟持された電解質層4とを備える。正極2は、YMnO3と、Y2O3と、Mn2O3との混晶からなる酸素貯蔵材料を含む。前記酸素貯蔵材料はYMn2O5を含むことが好ましい。
(もっと読む)
燃料ガス利用装置

【課題】バッテリの充電量を確保する燃料ガス利用装置を提供する。
【解決手段】バッテリ4と、燃料ガスが貯留される燃料ガス貯留部8と、フューエルリッド14と、フューエルリッド14の開閉状態を検出する開閉状態検出手段16と、燃料ガス貯留部8に貯留された燃料ガスの状態である圧力及び/又は温度を検出する燃料ガス状態検出手段11と、燃料ガス供給装置200と通信を行うための通信手段19と、開閉状態検出手段16からフューエルリッド14が開状態である旨の信号を受信すると、燃料ガス状態検出手段11から入力された燃料ガスの状態を、通信手段19を介して燃料ガス供給装置200に知らせるために充填通信を行う制御手段2cと、を備え、制御手段2cは、充填通信を開始した後、開閉状態検出手段16から受信する信号によって、フューエルリッド14が開状態のまま、所定時間が経過したと判断した場合には充填通信を停止する。
(もっと読む)
金属酸素電池
【課題】正極材料としてYMnO3からなる酸素貯蔵材料を用いると共に、充放電を繰り返しても充放電容量や電池性能の低下を抑制することができる金属酸素電池を提供する。
【解決手段】金属酸素電池1は、酸素を活物質とする正極2と、金属リチウムを活物質とする負極3と、正極2と負極3とに挟持され非水系電解質溶液を含む電解質層4とを備える。正極2は、YMnO3からなる酸素貯蔵材料と、非炭素質材料からなる導電助剤とを含む。
(もっと読む)
バッテリパック収容構造およびバッテリパックおよび歩行補助装置
【課題】バッテリパック収容部に液滴が浸入しても、電気接続コネクタ部分には液滴が浸入しない構造とし、部品点数の増加やバッテリパックの着脱操作性を悪くすることないバッテリパック収容構造とすること。
【解決手段】バッテリパック150を着脱自在に収容するバッテリ収容凹部102の下部であって電気接続コネクタ140の設置位置とは異なった位置に形成された排水用開口149と、バッテリ収容凹部102の起立した壁部102Bに、電気接続コネクタ140の上側位置を横切り、且つ上下に傾斜して延在し、傾斜下位端が排水用開口149に至るよう形成された水案内凹凸部143とを設ける。
(もっと読む)
ソレノイドおよび電磁弁
【課題】簡単な構成で、しかも作動初期において大きな推力を得ることができるソレノイドおよび電磁弁を提供する。
【解決手段】プランジャ11は、コア12に対向するプランジャ突出部11aを有し、コア12は、プランジャ11に対向するコア突出部12cを有し、プランジャ11には、電磁コイル13の通電時にコア突出部12cが収容されるコア収容部11bが形成され、コア12には、電磁コイル13の通電時にプランジャ突出部11aが収容されるプランジャ収容部12dが形成され、プランジャ突出部11aの先端11a1およびコア突出部12cの先端12c1が軸方向Gの断面視において鋭角に形成され、電磁コイル13の非通電時に、コア12とプランジャ11の各部位のうち、プランジャ突出部11aの先端11a1とコア突出部12cの先端12c1とが軸方向Gにおいて最も近接する部位となる。
(もっと読む)
半導体素子駆動装置及び方法
【課題】並列に駆動される複数の半導体素子の特性差によって生じる、ターンオンやターンオフ時のスイッチングにおける電流の偏りを緩和すること。
【解決手段】電圧変換器14は、IGBT13−1乃至13−3の各々のエミッタセンス電流を電圧信号に変換する。平均値演算器17や誤差演算器18等の演算器は、LPF15から出力される、IGBT13−1乃至13−3の各々に対応する電圧信号の平均値を求め、それぞれの電圧信号についての平均値に対する誤差を演算する。PWM波形生成部11は、IGBT13−1乃至13−3の各々を駆動するための駆動信号(パルス信号)を出力する。差動増幅器12の各々の駆動信号を、当該IGBT13−1乃至13−3の各々に対応する誤差に基づいて調整して、当該IGBT13−1乃至13−3の各々に供給する。
(もっと読む)
無線通信システムおよび無線通信方法
【課題】通信の信頼性を向上するとともに、消費電力を低減化させる無線通信システムおよび無線通信方法を提供する。
【解決手段】同一移動体に送信部と受信部を備えて信号を送受信する無線通信システムにおいて、上記送信部と受信部はそれぞれ周波数をホッピングしながら送受信するように構成され、上記受信部は、移動体の移動速度を計測する速度計と、移動体の移動速度によってホッピング速度を決めこの決めたホッピング速度で送信部からの信号を受信する受信制御部を備えたことを特徴とする。
(もっと読む)
スイッチング回路の制御装置
【課題】スイッチング回路の損失を低減させる。
【解決手段】スイッチング回路の制御装置10は、還流ダイオードに転流電流が流れるときに、この還流ダイオードに並列なスイッチング素子をオン作動させるPWM演算部25と、モータの目標回転数および目標トルクに基づき、スイッチング素子をオン作動させるオン時間を変更するデッドタイム演算部25aと、を備える。デッドタイム演算部25aは、目標回転数の増大に伴ってオン時間を減少傾向に変化させるとともに、力行を正かつ回生を負とする目標トルクの絶対値の増大に伴ってオン時間を減少傾向に変化させる。
(もっと読む)
分散制御システム
【課題】移動体における制御対象又は副制御ユニットの増減に容易に対応可能な分散制御システムを提供する。
【解決手段】分散制御システム400の主制御ユニット410は、制御対象430と制御対象430に付与されたアドレスとの関係が記憶された第一の記憶部411と、制御対象430に関する個別制御データをアドレスの順に並べた制御データを生成する制御データ生成部412と、制御データをブロードキャスト方式で送信する制御データ送信部414と、を備え、副制御ユニット420は、当該副制御ユニット420に対応する制御対象430のアドレスが記憶された第二の記憶部421と、第二の記憶部421に記憶されたアドレスに基づいて、個別制御データを取得する個別制御データ取得部422と、取得された個別制御データに基づいて、制御対象430の駆動を制御する制御対象制御部430と、を備える。
(もっと読む)
ロボットの制御装置
【課題】ロボットの各関節の動作状態の制御のための操作量を、擬似逆行列を用いる演算処理によって決定する場合に、その擬似逆行列を算出するために用いる適切なパラメータの値を効率よく短時間で決定する。
【解決手段】ロボット1の関節4の動作状態を制御するための操作量を決定する関節操作量決定手段22は、その演算処理に使用する擬似逆行列A*を、行列式DETの絶対値が所定の閾値以上になるように決定した調整パラメータkの値を用いて所定の式により算出する。調整パラメータkの暫定値を所定の初期値から段階的に増加させていくように設定することと、設定した各暫定値を用いてDETの値を算出することと、算出した行列式DETの絶対値が所定の閾値以上の値であるか否かを判断することとを繰り返し、該判断結果が肯定的となったときのkの暫定値を、擬似逆行列A*の算出に用いるkの値として決定する。
(もっと読む)
1,071 - 1,080 / 23,863
[ Back to top ]