
松山株式会社により出願された特許
71 - 80 / 285
農作業機
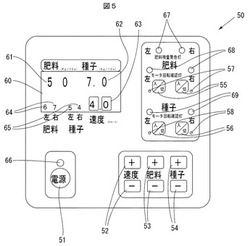
【課題】トラクタに装着して容器内の内容物をモータにより排出して農作業を行い、排出の際のモータの出力状態を確認可能な農作業機を提供することを目的とする。
【解決手段】トラクタに装着してホッパー21、31内の内容物をモータ22、32の回転により排出して農作業を行う農作業機であって、モータ22、32の出力を制御する制御部70と、モータ22、32に対する出力状態を段階的に表示する表示部60とを有する。さらに、制御部70はPWM(Pulse Width Modulation)によってモータ22、32の制御を行い、表示部60はPWMによるデューティー比の出力を段階的に表示する。
(もっと読む)
農作業機

【課題】作業者の負担を軽減できる農作業機を提供する。
【解決手段】農作業機1は作業機本体2を備え、この作業機本体2にはカゴ型の転圧輪23を回転可能に設ける。農作業機1は、転圧輪23の作業棒26に付着した土を落とす弾性変形可能な土落とし体41を備える。作業機本体2は被取付部50を有し、土落とし体41は被取付部50に上下位置調整可能に取り付ける。
(もっと読む)
農作業機用リモコン操作システム
【課題】部品の共通化が可能でかつシステムの変更を容易に行うことができるトラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムを提供することを目的とする。
【解決手段】トラクタに装着する農作業機に備える出力機器を無線で操作するための農作業機用リモコン操作システムであって、操作信号を無線送信可能な送信部10と、農作業機側に設置され送信部10からの無線信号を受信する受信部20と、農作業機側に設置され受信部20からの操作信号により出力機器を制御する制御部40と、受信部20と出力機器と制御部40とに接続される制御ハーネス30とを有し、受信部20と制御ハーネス30の間には、受信部20を脱着可能な接続部20aを具備する。
(もっと読む)
畦塗り機
【課題】作業性を低下させることなく散布ノズルの土詰まりを解消できる畦塗り機を提供する。
【解決手段】畦塗り機1は、畦形成手段22を有する作業機本体10を備える。畦塗り機1は、畦形成手段22に向けて液体を散布する散布ノズル36を有する散布手段31を備える。畦塗り機1は、散布手段31から散布する液体の散布量を設定する設定操作手段41を備える。畦塗り機1は、散布手段31を制御して液体の散布量を調整する制御手段42を備える。制御手段42は、液体の散布開始の指令を受けたと判断した場合に、散布手段31を制御して、調整可能な範囲内での最大散布量で液体を所定時間散布させた後、設定操作手段41による設定散布量で畦形成手段22に向けて液体を散布させる。
(もっと読む)
散布装置
【課題】被散布物のブリッジ現象の発生を適切に防止できる散布装置を提供する。
【解決手段】散布装置11は、被散布物を収容する収容体31を備える。収容体31の下部内には、上下方向の回動中心軸線Xを中心として往復回動しながら被散布物を攪拌する複数の攪拌体41を配設する。散布装置11は、収容体31内での被散布物のブリッジ現象の発生を防止する複数のブリッジ防止体45を備える。ブリッジ防止体45の上端側を収容体31の上端部に取り付け、ブリッジ防止体45の下端側を攪拌体41の先端部に取り付ける。
(もっと読む)
作物堀取装置
【課題】 前後の根菜作物の植生位置が左右にずれていても、搬送機構の前部の左右揺動で引抜き位置の変化に随時対応できるようにする。
【解決手段】 移動機に装着される機枠Kと、植生された根菜作物Sの茎S1を挟持して後上方へ持ち上げ搬送する搬送機構Hと、この搬送機構Hのフレーム4を前記機枠Kに連結する連結機構Gとを有する。前記連結機構Gは、フレーム4の前後中間部を吊り持ち状に支持する中間連結機構GRと、フレーム4の前部を左右揺動自在に吊り持ち状に支持する前連結機構GFとを有する。
(もっと読む)
作物堀取装置
【課題】 搬送機構の前部を中心に後部の左右位置を調整して、作物の放出位置を中央から左右位置に変更できるようにする。
【解決手段】 移動機に装着される機枠Kと、植生された根菜作物Sの茎S1を挟持して後上方へ持ち上げ搬送する搬送機構Hと、この搬送機構Hのフレーム4を前記機枠Kに連結する連結機構Gとを有する。前記連結機構Gは、フレーム4の前部を吊り持ち状に支持する前連結機構GFと、フレーム4の前後中間部を左右位置調整して放出位置を左右に変更自在に吊り持ち状に支持する中間連結機構GRとを有する。
(もっと読む)
オフセット作業機
【課題】農作業を行う作業部をオフセット移動可能で、現在の作業部の状態を確認することのできる表示部を有するトラクタに装着するオフセット作業機を提供することを目的とする。
【解決手段】農作業を行う作業部20をオフセット移動可能でトラクタ1に装着するオフセット作業機2において、表示部51と、センサ41とを有し、表示部51は、センサ41からの情報によりオフセット移動による作業部20の位置を示す現在オフセット位置51aと、あらかじめ設定されている設定オフセット位置51bとを表示することで上記課題を解決する。
(もっと読む)
散布装置
【課題】第1繰出回転体で繰り出す被散布物の量と第2繰出回転体で繰り出す被散布物の量とが異なる不具合を防止できる散布装置を提供する。
【解決手段】散布装置2は、収容手段11内の被散布物を繰り出す繰出手段12を具備する。繰出手段12は、第1回転軸21と、第1回転軸21と同軸上に位置する第2回転軸22と、第1回転軸21を回転させる第1電動モータ23と、第2回転軸22を回転させる第2電動モータ24とを備える。繰出手段12は、第1収容体13内の被散布物を繰り出す第1繰出回転体26と、第2収容体14内の被散布物を繰り出す第2繰出回転体27とを備える。繰出手段12は、第1回転軸21の回転速度を検出する第1センサ41と、第2回転軸22の回転速度を検出する第2センサ42と、両センサ41,42からの検出信号に基づいて両モータ23,24を制御する制御手段43とを備える。
(もっと読む)
畦塗り機
【課題】作業機本体の非作業状態時に散布手段が無駄に液体の散布をし続けることを防止できる畦塗り機を提供する。
【解決手段】畦塗り機1は、下方回動により作業状態になり上方回動により非作業状態になる作業機本体10を備える。作業機本体10は、盛土体12および畦形成体13を有する。畦塗り機1は、畦形成体13に向けて液体を散布する散布手段51を備える。散布手段51は、作業機本体10が非作業状態になった際に、畦形成体13に向けての液体の散布を自動停止する。
(もっと読む)
71 - 80 / 285
[ Back to top ]