
株式会社エクォス・リサーチにより出願された特許
21 - 30 / 1,360
電動駆動車両
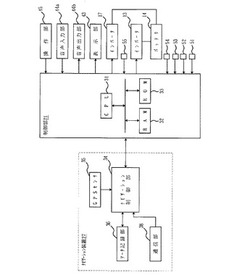
【課題】運転者が、どこまで走行させることができるかを知ることができ、安心して走行させる。
【解決手段】蓄電装置と、発電装置と、エンジンと、駆動モータと、現在地検出部と、電動駆動車両を走行させることができる道なりの走行可能経路を探索する経路探索処理手段と、距離当たり消費エネルギーに基づいて、走行可能時間を算出する走行可能時間算出処理手段と、走行可能距離を算出する走行可能距離算出処理手段と、走行可能範囲を算出する走行可能範囲算出処理手段と、走行可能範囲を表示部43に表示する走行可能範囲表示処理手段とを有する。
(もっと読む)
走行制御装置および車両

【課題】車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両を提供すること。
【解決手段】仮想バンパー領域71が道路幅Wrを超えている場合、仮想バンパー領域71の適用仮想バンパー幅を基準形状の仮想バンパー幅(以下「基準仮想バンパー幅」と称す)である2Wvbから縮小し、道路幅Wrとする。これにより、仮想バンパー領域71は、道路幅の内側に存在することになるので、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。
(もっと読む)
関節角度予測装置及び関節角度予測方法
【課題】人体の関節角度を計測する装置において、関節角度の予測精度向上を図る。
【解決手段】本発明の関節角度予測装置は、前記センサーによって検出された関節角度が、関節の可動範囲中、関節の可動限界に隣接する可動制限範囲内にあり、かつ、前記センサーの検出結果に基づく関節角度の角速度が所定値より大きい場合、関節の角速度が減衰することを条件として予測関節角度を算出することを特徴とする。
(もっと読む)
キャンバ角調整装置
【課題】軸と軸受との間のガタの発生を抑制しつつ、軸と軸受との間の摺動抵抗を低減できるキャンバ角調整装置を提供する。
【解決手段】アッパーアームの一端側が回転可能に連結されるクランクピン93bが、クランクジャーナル93aに対して偏心する。よって、クランクジャーナル93aが回転されると、アッパーアームの一端側がクランクピン93bの回転軌跡に沿って移動され、車輪のキャンバ角が調整される。クランクジャーナル93a及びクランクピン93bとジャーナル軸受96及びピン軸受97とがそれぞれ楕円形状に形成されるので、クランクジャーナル93a及びクランクピン93bの長径方向が、ジャーナル軸受96及びピン軸受97の短径方向を向いた状態では、両者の間にガタが発生することを抑制できる。一方、その状態から相対回転させる場合には、両者の間に隙間を形成して、摺動抵抗を低減できる。
(もっと読む)
車両
【課題】車体の安定性を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び本体部を備える車体と、車体を操舵する操舵可能な操舵輪と、操舵不能な非操舵輪と、操舵部又は本体部を旋回方向に傾斜させるリンク機構を作動させる傾斜用アクチュエータ装置と、操舵装置から入力された操舵角指令に基づいて操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、制御装置は、車速とリンク機構のリンク角とに基づいて、操舵角指令に対する操舵輪の操舵角の減速比となる操舵減速比を設定し、操舵減速比によって操舵用アクチュエータ装置を制御する。
(もっと読む)
歩行支援装置
【課題】安定的固定と装着感の両者を満足させることを目的とする。
【解決手段】固定具によって装置を脚に固定するが、固定具による締付力を変更する固定具アクチュエータを設けることにより、歩行支援装置の締付力を可変にする。そして、歩行支援装置1は、各姿勢センサや反力センサの検出値から、各関節アシストアクチュエータに対する歩行アシスト力を決定し出力することで歩行を支援する。一方、決定した各関節アクチュエータに対する歩行アシスト力が所定の閾値を超えるかどうかを判断し、超えている場合には大きなアシスト力を無駄なく脚に作用させるために、固定具アクチュエータを駆動して締付力を強くする。一方、歩行アシスト力が所定閾値以下の場合には、アシスト力の伝達(作用)よりも歩行支援対象者の装着感を優先して、締付力を弱くする。
(もっと読む)
触媒ペーストの製造方法
【課題】PFF構造を有する燃料電池の反応層用に好適な触媒ペーストの製造方法を提案する。
【解決手段】
触媒と水とを混合してプレペーストを得る第1のステップと、前記プレペーストに電解質溶液と多量の水を加えてホモジナイジング処理して分散液を得る第2のステップと、前記分散剤から水分を除去して、得られるプレペーストの水分量を流動限界からスラリー状態までの範囲内とする第3のステップと、を備える、ことを特徴とする触媒ペーストの製造方法。
(もっと読む)
ステアバイワイヤ装置
【課題】乗員のハンドル操作が違和感なく行われるコンパクトなステアバイワイヤ装置を提供する。
【解決手段】ステアリング11の回転操作によって前輪をフレーム12に対してトー方向に回転させる車両に用いるステアバイワイヤ装置1において、ステアリングの回転角を取得する回転角取得部材2と、回転角取得部材の取得した角度に応じて駆動力を発生するアクチュエータ3,4と、アクチュエータの駆動力を前輪のトー方向の回転へと伝達する連結シャフト5と、アクチュエータの出力軸から伝達された駆動力をアクチュエータの出力方向と反対方向で連結シャフトに伝達するジョイント部と、フレームに取り付けられアクチュエーを支持する支持部材6と、を有し、アクチュエータは、ステアリング11よりも下方であって、アクチュエータの出力軸と前記前輪のトー方向回転軸が平行になるように配置されることを特徴とする。
(もっと読む)
歩行支援装置
【課題】二重関節において歩行アシストに適した変動過度特性を実現する。
【解決手段】歯車54と歯車56の回転軸は、同じオフセット量だけ偏心させて軸支されている。このため、歯車54を駆動すると歯車54と歯車56のギア比が無段階で連続的に変化する。これにより単位アクチュエータ動作量当たりのトルクや関節動作速度も連続的に変化する。これを用いると、歯車54、歯車56の偏心オフセット量、連結アーム61の初期角度、連結軸62の位置(回転中心から連結軸62までの距離)を各種設定することにより、二重関節部50に様々な特性を持たせることができる。そのため、脚部の運動特性に合わせて二重関節部50の特性を廉価に最適化することができる。
(もっと読む)
燃料電池用触媒の製造方法
【課題】高分子電解質の側鎖の親水性官能基が、触媒上に親水層を形成すべく、触媒側に配向している構造(PFFタイプ)の反応層に適用される触媒を改良し、その触媒金属粒子の使用量を削減する。
【解決手段】本発明の燃料電池用触媒の製造方法は、担体に第1の触媒金属粒子を担持させてなる原料触媒を準備するステップと、該原料触媒の表面に第2の触媒金属粒子をスパッタリング法によって担持させるステップと、該第2の触媒金属粒子をスパッタリング法によって担持させた原料触媒を親水基を含んだ水溶液と接触させて該親水基を吸着させるステップと、を含む。例えば、触媒金属粒子として白金粒子、親水基として硝酸基、硝酸基を含んだ水溶液としてヘキサヒドロキソ白金酸の硝酸溶液を用いることができる。
(もっと読む)
21 - 30 / 1,360
[ Back to top ]