
Fターム[2B043BA02]の内容
農業機械一般(操向) (6,001) | 車両の種類 (615) | 乗用車両 (395)
Fターム[2B043BA02]の下位に属するFターム
4輪操向車両 (16)
Fターム[2B043BA02]に分類される特許
121 - 140 / 379
水田作業車
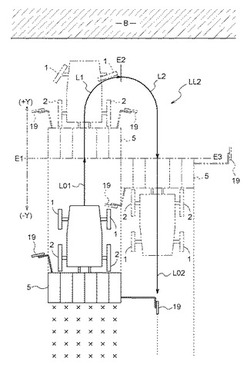
【課題】水田作業車において、旋回終了位置の検出に基づいて作業クラッチが自動的に伝動状態に操作されるように構成した場合、作業クラッチの伝動状態への操作が適切に行われるように構成する。
【解決手段】田面に接地して次の作業行程L02の指標を田面に形成する作用姿勢と、田面から上方の格納姿勢とに操作自在な右及び左のマーカー19を備える。旋回終了位置E3の検出に基づいて、作業クラッチを伝動状態に操作する操作手段を備える。旋回開始前の作業行程L01において、右又は左のマーカー19が作用姿勢に操作されていると、操作手段が作動する。
(もっと読む)
田植機

【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 操舵ハンドルとオペレータシートを備え、転向車輪と後輪の4輪で駆動する構成とし、機体後部に昇降部を介して昇降可能に植付部を設けた田植機において、旋回時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、該カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上でなく、その後、カウントが第二の所定値(n2)になったとき、植付クラッチを入にする連動制御を備え、カウントが第一の所定値(n2’)になったときにハンドル角度が規定値(b)以上であれば、連動制御を終了する制御装置を設けた。
(もっと読む)
作業車両
【課題】ステアリングハンドルのチルト操作を容易にできるとともに、前後進切換機構の誤操作や損傷を防止する、操作性を向上させた作業車両を提供する。
【解決手段】ダッシュボード9の後方に配設し、上方にステアリングハンドル11を突設させた、機体前後方向にチルト可能なステアリングコラム12と、このステアリングコラム12の一側部に設けた、機体の前後進の切換操作を行うリバーサレバー21と、このリバーサレバー21に連係する、ステアリングコラム12の下方に位置するミッションケース8の前部に内設した前後進切換機構32とを備え、リバーサレバー21は、ミッションケース8後部の一側部に設けた中継レバー28に、リンク部材27を介して連結するとともに、中継レバー28は、ミッションケース8前部の一側部に設けた前後進切換機構32の操作レバー33にロッド31を介して連結する。
(もっと読む)
作業車両
【課題】ステアリングハンドルをチルトさせても、ハンドアクセルレバーなどの操作部材の損傷防止および正確な操作を可能とした、操作性、生産性およびメンテナンス性を向上させた作業車両を提供する。
【解決手段】ボンネット5の後部に連設したダッシュボード9の後方に、上方にステアリングハンドル11を突設し、チルト可能に取付けたステアリングコラム12およびエンジン6の回転数を設定するハンドアクセル操作部材24を備え、ステアリングコラム12は、ダッシュボード9の後部に取付けたステアリングケース22に、チルト可能に取付けるとともに、ハンドアクセル操作部材24は、ステアリングケース22の一側部に設ける。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
作業車
【課題】直接操作又は遠隔操作で走行可能であり、この直接操作と遠隔操作とを作業状況に応じて正確に切り替えて、走行操作の操作性の向上を図ることができる作業車を提供する。
【解決手段】エンジン5の出力を走行装置に伝達する無段変速装置21と、変速ペダル16により無段変速装置21の変速比を変更する変速アクチュエータ60と、変速アクチュエータ60を遠隔操作可能なリモコン91と、リモコン91を保持可能なリモコンホルダ92と、リモコン91がリモコンホルダ92により保持されているかを検知する着脱センサ93と、着脱センサ93によりリモコン91がリモコンホルダ92に保持されていると検知された場合、変速ペダル16による直接操作を優先する制御を行い、着脱センサ93によりリモコン91がリモコンホルダ92に保持されていないと検知された場合、リモコン91による遠隔操作を優先する制御を行う制御装置80を備える田植機1。
(もっと読む)
農作業機
【課題】走行中は作溝器が不用意に圃場に作溝跡を作って、圃場を荒らさないようにした農作業機を提供すること。
【解決手段】ハンドル操向角度検出センサ109によりハンドル14が所定値まで操向操作されると制御装置110により、まず作溝器用油圧シリンダ89が作溝位置にある作溝器(溝切り装置)95を非作溝位置まで上昇させ、次いで播種装置用油圧シリンダ46を作動させて作業位置にある播種装置82を非作業位置まで上昇させ、また旋回終了直前又は旋回終了を判断すると、まず播種装置82が作業位置まで下降させ、次いで作溝器95を作溝位置まで下降する作動を行わせることで、作溝器95を播種装置82より先に上昇させて、また上昇した作溝器95を播種装置82より後で圃場に降ろすことで、圃場を荒らしたり、作物を傷めたりすることを防止できる。
(もっと読む)
作業車
【課題】作業車において旋回する場合に旋回終了位置を適切に検出し、作業装置が適切に作業状態に操作されるように構成する。
【解決手段】機体の走行距離Gと、操向操作自在な車輪1の直進位置からの操向角度とにより、作業行程からの旋回開始L01に基づいて、旋回開始前の機体の進行方向+Y,−Yでの旋回中の機体の位置を検出する。旋回開始位置E1の検出に基づいて、アクチュエータを作業装置5の非作業状態側に作動させ、旋回終了位置E3の検出に基づいて、アクチュエータを作業装置5の作業状態側に作動させる。アクチュエータの作業装置5の作業状態側への作動開始時期を変更可能に構成する。
(もっと読む)
田植機
【課題】作業姿勢から収納姿勢に筋引きマーカを移動させるアクチュエータ等を、低コストでコンパクトに組付けることができるようにした田植機を提供する。
【解決手段】圃場面に次工程の植付け軌跡を形成する左右の筋引きマーカ72と、筋引きマーカ72を圃場の圃場面から地上に上昇させるアクチュエータ79と、アクチュエータ79によって作動させるマーカ昇降体78を備え、前記筋引きマーカ72を、圃場面に着地させた作業姿勢、または圃場面から地上に持上げた収納姿勢に移動可能に構成した田植機において、前記作業姿勢又は前記収納姿勢に筋引きマーカ72を移動可能に支持するマーカ回動支点軸74を備える構造であって、マーカ回動支点軸74上に前記マーカ昇降体78を配置した。
(もっと読む)
農作業車
【課題】 往復植付け走行から枕地の周回植付け作業に入った時に、不適正な農作業装置の稼動を回避できるように制御すると共に、マーカの作動精度上昇によって作業性が向上する農作業車を提供する。
【解決手段】 機体の旋回動作を検出する旋回検出手段により検出される旋回開始のタイミングと対応して農作業装置の停止と走行距離計の計測開始を指令し、その走行距離から判定される旋回完了による次行程の作業開始位置への到達によって上記農作業装置の稼動を指令する旋回制御を行う制御処理部を備える農作業車において、左右の後輪の回転数を検出する回転センサーに基づき、左右のマーカのうち回転数の多い側のマーカを出す制御を行う。
(もっと読む)
田植機
【課題】筋引きマーカを姿勢変更させる機構のコンパクト化が図れる構造でありながら、植付け軌跡の形成作業中に突上げ力が作用しても筋引きマーカの損傷を防止できるようにした田植機を提供する。
【解決手段】圃場面に次工程の植付け軌跡を形成する左右の筋引きマーカ72と、筋引きマーカ72を圃場の圃場面から地上に上昇させるアクチュエータ79とを備え、筋引きマーカ72を、圃場面に着地させた作業姿勢または前記圃場面から地上に持上げた収納姿勢に移動可能に構成した田植機において、筋引きマーカ72を先端側に支持するマーカアーム73と、マーカアーム73の基端部に当接可能に設けられた係止体83と、アクチュエータ79によって駆動されるマーカ上昇ギヤ78とを備え、係止体83はマーカ上昇ギヤ78に突設され、係止体83によってマーカアーム73の基端部を押圧することで、筋引きマーカ72を圃場の圃場面から地上に上昇させるように構成した。
(もっと読む)
可変散布装置
【課題】GPSからの速度情報が得られない場合にも常に車速を正確に知ることができる散布装置を提供すること。
【解決手段】GPSから位置情報と速度情報を受信するGPS受信機78によりGPSから速度情報を得て、車速センサ37から車輪4又は5の回転数を検出し、両方の速度情報に基づき肥料散布装置1による肥料散布量を算出し、GPS速度情報が得られないときには、車速センサ37で得られる車速に基づき車速を算出して肥料散布量を決める乗用管理機である。そして肥料などの散布途中でGPSからの車速データが得られなくなっても、車速データを補正しながらスリップの影響が少なく精度良い散布作業を継続できる。
(もっと読む)
田植機
【課題】筋引きマーカを姿勢変更させる機構をコンパクト化できる構造でありながら、植付け軌跡を形成する適正な高さに筋引きマーカを確実に支持することができる田植機の実現を目的とする。
【解決手段】圃場面に次工程の植付け軌跡を形成する左右の筋引きマーカ72と、筋引きマーカ72を圃場の圃場面から地上に上昇させるアクチュエータ79とを備え、筋引きマーカ72を、前記圃場面に着地させた作業姿勢または前記圃場面から地上に持上げた収納姿勢に移動可能に構成した田植機において、筋引きマーカ72を前記作業姿勢に姿勢変更したときに当接する規制体103aを設け、規制体103aによって、圃場面に植付け軌跡を形成する高さに筋引きマーカ72を支持するように構成した。
(もっと読む)
農作業機の自動操向制御装置
【課題】本発明では、発信機と受信機等の通信機器を設けることなく、圃場に凹凸が有っても自動的に直進走行になるように制御する自動制御の操向制御装置を設けることで、農作業機を運転して農作業を行う作業者の労力を軽減し効率的作業を行えるようにすることが課題である。
【解決手段】走行装置を操向する操向制御装置と機体の進行方向を検出する進行方向検出手段を機体に設け、該進行方向検出手段が直進からずれたことを検出すると操向制御装置を直進に修正すべく制御したことを特徴とする農作業機の自動操向制御装置とした。
(もっと読む)
作業車両
【課題】作業効率性と作業の均一化に優れた旋回を行う作業車両を提供する。
【解決手段】直進方向を基準として、前記操向ハンドル7の回動角度を検出する角度検知手段51と、作業速度と旋回速度の制御の開始および/または終了の基準となる前記操向ハンドル7の回動角度の閾値Aを設定する角度閾値設定手段61と、前記回動角度の閾値A以上に前記操向ハンドル7が位置する場合の設定旋回車速Vを設定する旋回車速設定手段62と、前記油圧式無段変速装置23の変速アクチュエータ24と、制御手段81とを備え、前記制御手段81は、前記角度検知手段51による検出値が前記回動角度の閾値A以上になると、前記設定旋回車速Vとなるように前記変速アクチュエータ24を作動させ、前記角度検知手段51による検出値が前記回動角度の閾値A未満の場合、前記作業速度になるよう前記変速アクチュエータ24を制御するように構成した。
(もっと読む)
コンバイン
【課題】可変容積型油圧ポンプ及び可変容積型油圧モータを有する走行用HSTと機械式の多段変速装置とが走行系伝動経路に直列的に介挿され、前記走行用油圧モータが走行モード切替操作部材への人為操作に基づき選択的に小容積状態又は大容積状態とされるコンバインにおいて、低速走行させる必要がある場合における走行安全性を向上させる。
【解決手段】制御装置は、副変速検出センサからの信号に基づき前記多段変速装置が最低速段に係合していると判断する場合には、前記走行モード切替操作部材からの人為操作信号に拘わらず前記走行用油圧モータが大容積状態となるように走行モード切替作動機構を強制的に作動制御する。
(もっと読む)
苗移植機
【課題】マーカ自動入切装置8を非作動状態にしたとき、旋回頻度が高い圃場などで作業中に圃場を荒らさないようにした苗移植機を提供すること。
【解決手段】車体2の旋回に連動して作用状態となる線引きマーカ6を左右何れかに自動的に切り替えるマーカ自動切替装置7と該マーカ自動切替装置7を作動状態と非作動状態とに切り替えるマーカ自動入切装置8とハンドル34の操向操作に連動して操向内側の後輪11の駆動を断続的に入り切りする断続的入り切り制御機能B1とを備え、該断続的入り切り制御機能B1は、マーカ自動入切装置8を非作動状態に切り替えたとき、操向内側の後輪11の駆動を入/切する周期の入状態の割合を通常の旋回時に予め設定している操向内側の後輪11の駆動を入/切する周期の入状態の割合より大きくする構成とした。
(もっと読む)
走行車両
【課題】旋回直後に、次行程の作業位置に合わせるべく操向ハンドルを操作するような時に、旋回後の走行車体の位置合わせを安定して容易に行うことができる乗用型作業機などの走行車両を提供する。
【解決手段】操向ハンドルの操作に連動して操向内側の後輪の駆動を断続的に入り切りする断続的入り切り制御機能B1は、該制御機能B1を作動させた後にハンドルの戻し操作により一度前記制御機能B1が非作動状態となったにもかかわらず、ハンドルの操向操作があるとき、前記制御機能B1における操向内側の後輪の駆動力を入/切する周期の入状態の割合を前回の制御機能B1の作動時の入状態の割合より小さくすることで、走行車体の操向を速やかに行えるため、旋回後の走行車体の位置合わせが安定して容易に行える。
(もっと読む)
作業車
【課題】作業車において旋回の終了を適切に検出することができるように構成する。
【解決手段】車輪2の回転数に基づいて機体の走行距離Gと、操向操作自在な車輪1の直進位置A1からの操向角度Aとにより、作業行程からの旋回開始に基づいて、旋回開始前の機体の進行方向での旋回中の機体の位置Y2を検出する。
(もっと読む)
水田作業機の走行変速操作構造
【課題】変速レバーに多くの機能を与えることにより、水田作業機の操作性を向上させる。
【解決手段】変速レバー11を前進変速操作径路Fにおいて中立位置Nから高速位置側へ操作するに連れてエンジン8の調速機構25を高回転側に作動させ、変速レバー11を中立位置N側へ操作するに連れて調速機構25を低回転側に作動させるように設定する。水田作業装置への動力伝達を断続する作業クラッチ60を入り切り操作する指操作可能なスイッチを、変速レバー11の握り部に備える。走行機体の操向操作に連動して水田作業装置を自動的に上昇させるオートアップ制御手段を備える。
(もっと読む)
121 - 140 / 379
[ Back to top ]