
Fターム[2B043BA02]の内容
農業機械一般(操向) (6,001) | 車両の種類 (615) | 乗用車両 (395)
Fターム[2B043BA02]の下位に属するFターム
4輪操向車両 (16)
Fターム[2B043BA02]に分類される特許
61 - 80 / 379
苗移植機
【課題】作業者が苗植付装置の入切や苗植付部の昇降などを操作することなく、作業者の労力の軽減が図れると共に、苗の植付作業の効率が向上する苗移植機の提供である。
【解決手段】左右前輪10及び左右後輪11と、フレーム15と、左右前輪10を操向操作するハンドル34と、ハンドル34の操向角度を検出する切れ角センサ93と、フレーム15の後方に昇降リンク装置3を介して昇降可能に連結し、苗載台51と苗植付装置52とを備えた苗植付部4と、苗植付装置52の作業状態切替レバー68と、昇降リンク装置3の油圧シリンダ46や油圧バルブ80などの昇降手段と、切れ角センサ93の値に応じて昇降手段による苗植付部4の昇降及び切替レバー68の切替を制御する制御装置100とを設けた苗移植機である。ハンドル操作に苗植付部4の昇降と苗植付装置52の入切が連動するため、作業者が苗植付装置52の入切をする必要がなく、労力が軽減する。
(もっと読む)
農作業機

【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
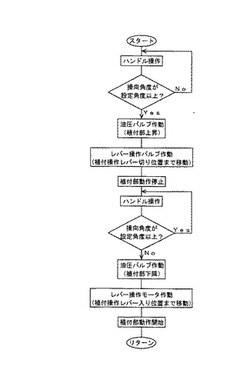
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
薬剤散布用管理作業車両
【課題】GPSセンサによって得られる機体の移動速度を散布車速として車速連動により所要の面積密度で薬剤を散布する際に、散布走行速度の検出精度について妥当性の判断を可能とする薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、GPS電波を受けて機体位置を検出するGPSセンサS2と、このGPSセンサS2によって得られた機体の移動速度であるGPS車速VGを散布車速として車速連動により散布動作する散布装置Dとを備えて単位面積当たり所定の薬液量で薬剤散布走行が可能に構成され、上記前輪3及び後輪4の走行動作を検出する車速センサS1を設け、この車速センサS1に基づいて前輪3及び後輪4の走行動作と対応する機体の計算車速Vsを算出し、この計算車速Vsと上記GPS車速VGとを区別して表示するモードを設けたものである。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、耕作機構419を備えた農機300に、情報処理装置100と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、農機300は、農地4について設定されたコースとコースを走行中に耕作機構419が行う農作業とを記憶し、位置標定装置411によって標定される現在位置と記憶しているコースとに基づき、農機300の操舵機構417又は動力機構418を制御してコースに沿って自律走行するとともにその走行中に耕作機構419による農作業を行うようにする。
(もっと読む)
薬剤散布用管理作業車両
【課題】単位面積当たり所定量の薬液散布による適正な薬剤散布のために、高精度の散布速度を安定して取得することができる薬剤散布用管理作業車両を提供する。
【解決手段】薬剤散布用管理作業車両は、圃場走行可能に機体を支持する前輪3及び後輪4と、散布車速を連動基準として散布量制御する制御部Cにより単位面積当たり所定量の薬液量で薬剤散布を行う車速連動散布装置Dとを備えて構成され、上記前輪3及び後輪4の駆動動作を検出する駆動センサS1とGPS電波を受けて機体位置を検出するGPSセンサS2とを設け、このGPSセンサS2によって得られた機体の移動速度を散布車速として車速連動散布装置Dを散布量制御するとともに、駆動センサS1によって得られる機体の駆動速度について上記移動速度との差から算出される前輪3及び後輪4のスリップ率を取出し可能に保持する格納部C1を備えたものである。
(もっと読む)
農作業機
【課題】 機体の旋回制御において、圃場状況や作業形態に応じて更なる作業性向上を図ると共に、作業開始位置あるいは作業終了位置の更なる適正化を図ることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止してからの走行距離が所定の設定走行距離に到達するか又は機体の畦際旋回時に農作業装置の作動を停止してからの時間が所定の設定時間に到達すると自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動停止時又は作動開始時の機体の向きに対する畦の角度を判別する畦角度判別装置と、機体の旋回方向を判別する旋回方向判別装置102を設け、制御装置は、畦角度判別装置と旋回方向判別装置102とに基づき、機体の旋回方向が畦から離れる側であるときに前記所定の設定走行距離を小さく補正し、機体の旋回方向が畦に近づく側であるときに前記所定の設定走行距離を大きく補正する構成とした。
(もっと読む)
田植機
【課題】 本発明の課題は、取り外し自在にした安価なスペースマーカを備えた田植機を提供することである。
【解決手段】 走行車体の後側に昇降リンク装置を介して苗植付部を装着した田植機において、走行車体の左右側方には支持部材に設けた回動中心回りに回動可能に苗枠(6)を設け、機体の側方へ突出させて側方の畦と機体の間隔を測るスペースマーカ(61)を、左右いずれの苗枠(6)にも着脱可能で該苗枠(6)の長辺側の一辺部に沿って取付部材を介して着脱自在に取り付け、苗枠(6)の回動により機体の前端側に向け得る構成とした。
(もっと読む)
作業車両
【課題】耕耘作業を行う作業車両の発進時に、耕耘負荷や走行負荷が大きい場合であっても、エンジン回転数の低下を抑制することができ、エンジンの停止を回避することができる作業車両を提供する。
【解決手段】走行速度を変速する無段変速機を備え、ロータリ耕耘装置を昇降可能に装着する作業車両となるトラクタであって、前記トラクタが停止し、前記ロータリ耕耘装置が接地し、かつ、前記ロータリ耕耘装置が駆動して、その後、前記トラクタが発進する場合は、その発進から規定距離X又は規定時間Tが経過するまでは、前記無段変速機の目標変速比を所定の補正率で減速側に補正するものである。
(もっと読む)
移植機
【課題】操作性が良くかつ迅速に振出し方向の切換えを行うことのできる線引きマーカを備えた移植機を提供する。
【解決手段】植付部が上方位置にある場合、機体左側の線引きマーカが作業姿勢に設定されている状態で、作業機操作レバーを前方側に傾倒操作すると、左右の線引きマーカが共に作業姿勢になる両落ち状態が設定され、この両落ち状態が設定された状態で再度、作業機操作レバーを再度前方側に操作すると、機体左側の線引きマーカが収納姿勢に設定される(ステップS54〜S59)。また、植付部が下方位置にある場合、機体左側の線引きマーカが作業姿勢に設定されている状態で、作業機操作レバーを前方側に傾倒操作すると、機体左側の線引きマーカが収納姿勢に設定されると共に、機体右側の線引きマーカが作業姿勢に設定される(ステップS54,S55,S58,S59)。
(もっと読む)
移植機
【課題】線引きマーカの収納忘れを防止した移植機を提供する。
【解決手段】機体左側の線引きマーカは、作業機操作レバーが後方側に操作されることによって、収納姿勢と作業姿勢とに交互に切換わり(ステップS44〜S47)、機体右側の線引きマーカは、作業機操作レバーが前方側に操作されることによって、収納姿勢と作業姿勢とに交互に切換わる(ステップS48〜S51)。また、これら左右の線引きマーカは、マーカ自動スイッチが切操作されると、両上げ状態となり、マーカ自動スイッチが入操作されると、両上げ状態まえの姿勢に復帰する(ステップS52〜S54)。
(もっと読む)
コンバイン
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応すること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量を変更可能に構成した。その結果、オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させることができる。
(もっと読む)
農作業車両運行管理システム
【課題】 農作業車両の運行状況を即時的に、空間的に確認することができる農作業車両運行管理システムを提供することにある。
【解決手段】 農作業車両に搭載された移動体装置から送信された位置情報を受信し、地図データベースから取得した地図データの表示画面に重ねて表示する手段を備えることを特徴とする。また、移動体装置から送信された位置情報と、地図データベースから取得した圃場データとの重なりの条件によって、表示画面に作業状況を色分け表示する手段をさらに備えることを特徴とする。また、移動体装置から送信された位置情報の日付と、地図データベースから取得した圃場データと圃場データに格納された作業予定日の比較結果に基づき、表示画面に圃場データを色分け表示する手段を備えることを特徴とする。
(もっと読む)
乗用型田植機
【課題】植付部が自動的に昇降する際の安全性を向上させた乗用型田植機を提供する。
【解決手段】乗用型田植機は、車体と、報知部と、植付部と、植付部を上下に昇降するための昇降シリンダと、昇降シリンダの駆動を制御する制御部と、を備える。そして、前記制御部は、植付部を自動的に昇降させる制御を開始するトリガを検出した場合、前記報知部によって植付部の自動昇降を報知した後、昇降シリンダを駆動して植付部を昇降させる。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
乗用田植機
【課題】所望の箇所で正確に苗植付装置を下降可能な乗用田植機を提供する。
【解決手段】制御部50が、旋回時前期にて、植付クラッチ51、サイドクラッチ55をこの順に切り、旋回時後期にて、サイドクラッチ55、植付クラッチ51をこの順に入れる。そして、エンジン12から後輪17へ駆動力の伝達するための出力軸EOをサイドクラッチ55の上流側に備え、後輪17の回転数を検出する回転センサ54を出力軸EOに設け、旋回時後期にて、植付クラッチ51を入れるタイミングを、旋回時における植付クラッチ51を切ってからサイドクラッチ55を切るまでの間の回転センサ54の回転数と既定の回転数との和に基づいて制御部50が決定する。
(もっと読む)
作業機
【課題】 本発明は、機体の小回り旋回性を維持しながら、各種の状況に応じて適切に圃場が荒れるのを抑えることを課題とする。
【解決手段】 操向手段の操作を検出する旋回角度センサ(193)と、ステアリング機構により前輪が直進状態から操舵状態へ操向されるのに連動して操向内側のサイドクラッチを断続的に入/切し、前輪が操舵状態から直進状態へ戻るのに連動して操向内側のサイドクラッチを常時入状態にする旋回連動機構と、耕盤の深さを検出する耕盤深さセンサ(48)を設け、耕盤が深いことを耕盤深さセンサ(48)により検出すると、旋回連動機構により断続的に入/切する周期における入状態の割合を大きく変更する制御装置(163)を備えた作業機とした。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
自走式車両
【課題】泥などが蓄積しない保護部によってパワーステアリング機構を保護することのできる自走式車両を提供する。
【解決手段】ハンドル21の操作によって左右の前輪15の方向を同時に変更するパワーステアリング機構psを有し、そのパワーステアリング機構psを介して左右のそれぞれの前輪15の方向を変更するトラクタ10において、走行時に、パワーステアリング機構psを障害物から保護するための保護棒71をシャーシ(車体フレーム)14に取り付けるとともに、保護棒71をパワーステアリング機構psの前方に、かつ、そのパワーステアリング機構psに沿って設ける。
(もっと読む)
乗用型苗植機
【課題】 本発明は、乗用型苗植機のコンパクト化を図るために、苗植付装置を走行機体の後部に極力近接させた状態で装着した場合でも、線引きマーカを格納姿勢にすれば苗植付装置の横幅内に収められて、真にコンパクト化が図られた乗用型苗植機を提供することを目的とする。
【解決手段】 乗用型苗植機において、該線引きマーカは機体に基部を軸支して上下揺動自在に設けた揺動アーム(23)に、回転体の外周部に複数の爪部を設けた回転式マーカ(27)を回転自在に軸支した支持アーム(26)を装着した構成とし、線引きマーカの格納状態で回転式マーカ(27)が苗載台(14)の上端よりも高い位置で且つ苗植付装置(3)の左右幅内に収まるように、揺動アーム(23)に支持アーム(26)を回動自在に装着してある。
(もっと読む)
61 - 80 / 379
[ Back to top ]