
Fターム[2B043BA02]の内容
農業機械一般(操向) (6,001) | 車両の種類 (615) | 乗用車両 (395)
Fターム[2B043BA02]の下位に属するFターム
4輪操向車両 (16)
Fターム[2B043BA02]に分類される特許
101 - 120 / 379
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
乗用溝切り機

【課題】駆動装置による圃場での安定走行を実現すると共に、圃場だけでなく舗装路のような道路でも乗用が可能となる画期的な乗用溝切り機を提供すること。
【解決手段】操舵する前輪1と、駆動輪となる後輪2とを乗用部3に設け、少なくとも後輪2を右後輪2Rと左後輪2Lとを有する複数輪に構成すると共に、この右後輪2Rと左後輪2Lとを、駆動装置8により回転駆動される回転駆動軸と連結して駆動するように構成し、この回転駆動軸と前記右後輪2R若しくは左後輪2Lとを連結する連結部10に、この回転駆動軸の回転を伝達する駆動連結状態と回転が伝達されないで回転自在となるフリー連結状態とに切り替える駆動・フリー切り替え機構11を設ける。
(もっと読む)
作業車の操向制御装置
【課題】トランスミッションの応答性能に拠らず、さらに、機体位置検出手段が検出不能域に存在する場合であっても、機体を、所定の進行方向から外れることなく圃場の作物に沿って自動操向させることのできる作業車の操向制御装置を提供すること。
【解決手段】機体位置検出手段16の検出値に基づいて、修正出力を出して機体が圃場の作物Mに沿うように操向操作手段22a,22bを制御する操向制御手段23aと、操向制御手段23aが修正出力の出力を開始すると、右及び左の回転数検出手段26a,26bの検出値の差を演算する演算手段23bとを備え、演算手段23bの演算値が設定値以上になると、操向制御手段23aが修正出力の出力を停止するように構成する。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降駆動されるように構成した場合、作業装置が下降駆動されるタイミングのばらつきを抑える。
【解決手段】機体が旋回を開始したと判断する旋回開始判断手段と、旋回開始判断手段により機体が旋回を開始したと判断されてからの旋回中の機体の走行距離Eを連続的に検出する走行距離検出手段とを備える。走行距離検出手段により検出された機体の走行距離Eが設定距離E1に達すると、上昇状態の作業装置を地面まで自動的に下降駆動させる自動下降手段を備える。
(もっと読む)
作業機
【課題】旋回内側の後輪による圃場の荒らしが軽減できると共に、連結されている作業装置などの揺れや振動を低減し、操作性を向上させる作業機の提供である。
【解決手段】原動機20を備えた走行車体2と、前輪10及び後輪11と、操縦席31と、操向ハンドル34と、操向ハンドル34の操作に連動して前輪10の向きを変更できるステアリング機構(86Iなど)と、走行車体2の後側に昇降リンク装置3により装着された苗植付部4と、原動機の回転数検出手段102と、ステアリング機構(86Iなど)に連動して旋回内側の後輪11の駆動力を断続的に入切する制御機能Bを備えた制御装置163とを備えた作業機であって、制御装置163は、原動機回転数検出手段102により検出される回転数が所定値以上である場合に制御機能Bの旋回内側の後輪11のサイドクラッチの入切周期の入り時間の割合を減少させる補正機能Cを有する。
(もっと読む)
移動農機
【課題】簡素な構成によって直進性を確保することを可能にした油圧式無段変速装置を備えた移動農機を提供する。
【解決手段】クローラトラクタは、ステアリングホイールが中立位置にされると、斜板式可変容量ポンプ37rの前進側斜板操作ポート37raと斜板式可変容量ポンプ37lの前進側斜板操作ポート37la、斜板式可変容量ポンプ37rの後進側斜板操作ポート37rbと斜板式可変容量ポンプ37lの後進側斜板操作ポート37lbをそれぞれ連通するバイパスバルブ35を備えている。これにより、左右の斜板式可変容量ポンプ37r,37lに入力される制御圧が等しくなるので、直進性を確保することができる。
(もっと読む)
水田作業車
【課題】水田作業車において、旋回終了位置が検出されると作業装置を作業状態に操作するように構成する場合、作業装置の作業状態への操作が適切に行われるようにする。
【解決手段】機体の旋回開始からの機体の走行距離を検出する走行距離検出手段56、又は機体の旋回開始からの経過時間を検出する経過時間検出手段57を備える。走行距離検出手段56の検出値が設定距離に達するまでに、又は経過時間検出手段57の検出値が設定時間に達するまでに、作業装置操作手段55による作業装置の作業状態への操作が終了しなければ、作業装置操作手段55の作動を停止させる停止手段58を備える。
(もっと読む)
水田作業機のラインマーカ
【課題】 水田の土壌条件によってラインマーカによる線引きが、明確に行われたり、不明確である場合があり、この線引きが不明確なときは、作業者の視認が難くなり、車体の操向性を行い難くなる。
【解決手段】 水田を走行しながら対地作業する作業機の横側に出没して、土壌面に操向指標の線引きを行う土掻きラグを有したラインマーカ1を、この接地部を強制的に駆動回転して土壌面を掻き起して線引きする。このラインマーカ1のモータ等による強制駆動によって回転されると、土壌面の線引部が土掻きラグによって、土壌面部が深く、乃至高く掻き起されて、線引を明確に形成する。
(もっと読む)
走行車両
【課題】走行機体に搭載されたエンジンの動力を変速する直進用及び旋回用変速機と、直進用変速機に対する直進操作具と、旋回用変速機の旋回操作具とを備えている走行車両において、操作系統の簡素化及び操作性の向上を図る。
【解決手段】互いに直交する旋回軸線及び変速軸線回りに回動可能な制御体を内蔵したステアリングボックス120を備える。旋回操作具の操作に伴う制御体の旋回軸線回りの正逆回動にて旋回用変速機54を作動させる一方、直進操作具の操作に伴う制御体の変速軸線回りの正逆回動にて直進用変速機を作動させるように構成する。ステアリングボックス120は、走行機体に設けられた操縦部9のうち走行機体1の左右中央側に位置するサイドコラム12内に配置する。
(もっと読む)
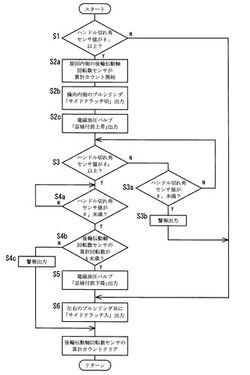
作業車両
【課題】旋回内側後輪のスリップが発生する圃場状況にあっても、円滑な旋回走行を確保するとともに、作業部の下降および再稼動の位置ずれを抑えて作業精度を確保することができる作業車両を提供する。
【解決手段】作業車両は、前輪10の操舵開始により、旋回内側後輪の回転距離のカウント開始、作業部4の停止、旋回内側後輪11のサイドクラッチ切、同後輪11の回転距離nに基づく設定値N2対応の作業部4の再稼動までの一連の旋回連動制御をする制御装置163を備えて構成され、この旋回連動制御は、内側サイドクラッチの断続動作によって旋回内側の後輪11に外側と同速の走行動力を間欠的に伝動する内側間欠伝動制御に切替え可能に構成し、この内側間欠伝動制御への切替えと対応して設定値N2を小さくする補正を行うようにしたものである。
(もっと読む)
走行散布作業機
【課題】GPS信号に基づき走行散布作業機の位置情報を得て、隣接位置での重複した農作業を行なうことがないようにした走行散布作業機を提供すること。
【解決手段】GPSより得られる位置情報から機体の直進方位と、旋回開始位置から90度旋回して旋回戻し位置(e地点)に達した後、さらに90度旋回して直進する隣接作業方位を求め、肥料噴管からの粉粒体の散布幅を読込み、求めた直進方位と隣接作業方位から両方位間の移動距離d1を算出し、隣接作業方位から隣接作業方位と旋回戻し位置の移動距離d2を算出し、移動距離d1から隣接作業方位と前記旋回戻し位置の間隔を差し引いて前記間隔(移動距離d1−d2)を算出し、旋回開始位置と旋回戻し位置の間隔(移動距離d1−d2)を位置情報に変換して旋回戻し位置を求め、旋回を開始すると粉粒体散布装置を駆動停止させ、隣接作業位置(f地点)に達すると粉粒体肥料散布装置を駆動開始させる。
(もっと読む)
作業機
【課題】旋回内側の後輪による圃場の荒らしが軽減できると共に、連結されている作業装置の揺れを低減し、車両の操作性や作業装置の連結機構の耐久性を向上させる作業機の提供である。
【解決手段】走行車体2と、前輪10及び後輪11と、操縦席31と、操向ハンドル34と、操向ハンドル34の操作に連動して前輪10の向きを変更できるステアリング機構(86I、180、217)と、走行車体2の後側に昇降リンク装置3を介して昇降可能に装着された苗植付部4と、ステアリング機構(86Iなど)に連動して旋回内側の後輪11の駆動力を不規則に断続的に入切する不規則入り切り制御機能Bを備えた制御装置163とを備えた作業機である。車両の旋回時に旋回内側の後輪11が不規則に断続的に駆動することで、走行車体2上の構造物が後輪11の駆動力に共振することを防止し、走行車体2の揺れ及び振動を抑えて操縦者の作業環境を良好に維持できる。
(もっと読む)
移植機
【課題】苗の植付け作業において、的確な条止め操作を行うことができる移植機を提供する。
【解決手段】移植機は、複数条A、B、C、D、E、F、G、Hの苗を圃場40に植付ける植付け装置と、該植付け装置の駆動を少数条ごとに停止させる条止め装置と、旋回後の次行程で機体の中心が通る走行予定中心線43を引くマーカ32とを備え、前記マーカ32を支持するマーカアーム31に条止め予定位置を示す指33a、33b、33c、33dを設け、最後の植付け行程で全条A、B、C、D、E、F、G、H分の苗を植付けられるように予め圃場40に引かれた最終植付け行程用走行予定中心線42と、該最終植付け行程の前植付け行程における前記指標32a、32b、32c、32dとを比較して前記条止め装置で条止めする。
(もっと読む)
作業車の最高速度制御機構
【課題】変速アクチュエータを駆動制御して移動速度を変更する構成において、最高移動速度を制限する最高速度設定器を備えることにより、操作性および走行性の良い作業車の最高速度制御機構を提供する。
【解決手段】エンジン5が搭載された走行機体3と、無段変速装置と、変速ペダル16(変速操作具)と、変速ペダル(変速操作具)の操作量に基づいて無段変速装置を変速制御する変速アクチュエータと、を備えた田植機1において、変速ペダル(変速操作具)を最大に操作したときの最高移動速度を制限する最高速度設定器を設け、路上走行または走行機体の傾動によって、最高移動速度を制限可能に構成した田植機(作業車)の最高速度制御機構である。
(もっと読む)
水田作業車
【課題】水田作業車において、作業装置の昇降に伴って右又は左のマーカーを自動的に作用姿勢に操作するマーカー操作手段、及び、旋回終了位置の検出に基づいて作業装置を自動的に作業状態に操作する作業装置操作手段を備えた場合、マーカー操作手段及び作業装置操作手段を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
乗用型作業機
【課題】 旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 機体にエンジンからの動力を各別に入り切りする左右サイドクラッチ(SC)を介して駆動される左右後輪を設け、作業装置を昇降可能に備えて対地作業しつつ走行する機体の旋回動作を制御するとともに、その旋回動作と連動して作業装置の稼動と昇降を制御する制御部を備える乗用型作業機において、該作業装置の稼動、下降、または上昇を制御する為に機体の走行距離を検出する検出装置(S)を設け、該検出装置(S)は、回転検出用の歯車回転体(K)の回転数を検出する構成とした。
(もっと読む)
水田作業車
【課題】水田作業車において、人為操作具及び前輪の操向操作による作業装置の非作業状態への操作により旋回開始位置が検出された場合、作業終了位置(旋回開始位置)と作業開始位置(旋回終了位置)とが、畦から略同じ位置になるように構成する。
【解決手段】人為操作具による作業装置5の非作業状態への操作に基づく機体の旋回終了位置E31と、前輪1の操向操作による作業装置5の非作業状態への操作に基づく機体の旋回終了位置E32との差が小さくなるように、旋回終了位置E32を機体の旋回行程L1,L2に沿って旋回開始位置E12側に移動させる(θ1,E31参照)。
(もっと読む)
移植機
【課題】組み立てを簡略化し、組立性の向上を図る。
【解決手段】デフロック機構を操作するデフロックペダル34と、デフロックペダル34によるデフロック機構の操作荷重を調節するデフロック操作荷重調節部38と、各サイドクラッチ13のシフタアーム14をデフロックペダル34に連繋させ、ステアリングハンドル16の旋回操作に応じたサイドクラッチ13の切り作動を、デフロックペダル34の操作に応じて解除する左右の解除リンク33と、デフロックペダル34の操作に応じた解除リンク33の解除タイミングを調節する解除タイミング調節部44とを備え、デフロックペダル34、デフロック操作荷重調節部38及び解除タイミング調節部44を、予めベース部材47に組み付け、前側伝動ケースの後面部に一体的に取付可能とした。
(もっと読む)
水田作業車
【課題】水田作業車において、旋回終了位置の検出に基づいて作業クラッチが自動的に伝動状態に操作されるように構成した場合、作業クラッチの伝動状態への操作が適切に行われるように構成する。
【解決手段】田面に接地して次の作業行程L02の指標を田面に形成する作用姿勢と、田面から上方の格納姿勢とに操作自在な右及び左のマーカー19を備える。旋回終了位置E3の検出に基づいて、作業クラッチを伝動状態に操作する操作手段を備える。旋回開始前の作業行程L01において、右又は左のマーカー19が作用姿勢に操作されていると、操作手段が作動する。
(もっと読む)
作業機
【課題】安価で制御性に優れる無段変速機構を備えた作業機を提供する。
【解決手段】田植機1は、エンジン2と、電動モータ22と、差動装置23と、後車輪21と、制御部と、を備えている。差動装置23は、エンジン2の出力と電動モータ22の出力との差動動力を後車輪21に出力する。制御部は、電動モータ22の回転速度を制御する。また、エンジン2の出力は略一定とされる。そして、車体の前進時において、制御部はエンジン2の駆動力を打ち消す方向にのみ電動モータ22を回転駆動することで、後車輪21への出力の変速を行う。
(もっと読む)
101 - 120 / 379
[ Back to top ]