
Fターム[2B043BA02]の内容
農業機械一般(操向) (6,001) | 車両の種類 (615) | 乗用車両 (395)
Fターム[2B043BA02]の下位に属するFターム
4輪操向車両 (16)
Fターム[2B043BA02]に分類される特許
161 - 180 / 379
乗用型苗植機
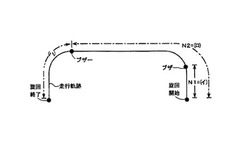
【課題】 適切な位置で苗の植え付けができる制御装置を備えた乗用型苗植機を提供すること。
【解決手段】 エンジンからの動力が伝達される伝動装置と、該伝動装置からの出力で駆動する左右の後輪と、該後輪への伝動を入り切りするサイドクラッチと、昇降自在の苗植付部と、走行距離を検出する走行距離検出センサと、操向操作用のハンドルを走行車体に設け、ハンドルの操作角度が所定値以上になると走行距離検出センサにより走行距離の検出を開始し、該走行距離が設定距離に達すると報知する報知装置を設けたことを特徴とする乗用型苗植機とした。
(もっと読む)
コンバイン

【課題】オペレータが手で握りながら揺動操作する操向操作具の上部に、オペレータが操向操作具を握った状態の親指で押圧操作可能な複数の押しボタン式スイッチを設けるにあたり、オペレータが誤操作を起こすことなく択一的に押しボタン式スイッチを押圧操作できるようにする。
【解決手段】操向操作具7の上部に親指で押圧操作可能な左右一対の押しボタン式スイッチ31a,31bを設けるにあたり、両押しボタン式スイッチ31a,31bを水平方向Hに対して右上がり傾斜で配置すると共に、両押しボタン式スイッチ31a,31bの略中間位置mにおいて、親指で押圧操作可能な対向する上下一対の押しボタン式スイッチ32a,32bを垂直方向Vに対して左傾斜で配置した。
(もっと読む)
作業機の操向角検出構造
【課題】単一センサで操向角度センサを構成できる良さを生かしながら、操向角度センサの取付位置を合理的に設定して、故障等を未然に回避して信頼性の高い作業機の操向角検出構造を提供する。
【解決手段】前輪の操向角度を検出する操向角度センサ47と繰向部材41とを連係機構Bによって連係する。連係機構Bを、繰向部材41より後方に延出された連係ロッド48と、その連係ロッド48の作動を伝達する上下向き姿勢の回転連係軸49とで構成し、操向角度センサ47を前記回転連係軸49の上端部に連係させてある。
(もっと読む)
走行車両
【課題】多条植えの乗用型作業機が、たとえ湿田走行中であっても、前進の場合は所望の走行経路で旋回が可能となるとともに、後進の場合については、安定して後進旋回することができる走行車両を提供する。
【解決手段】走行車両は、走行車体(2)と、旋回内側の走行推進体(11)の駆動を断続的に入/切する旋回連動機構(A)と、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を旋回連動機構(A)により断続的に入/切する周期を変更する制御装置(163)を備えて構成され、上記走行車体(2)には、その前後進の方向を検出する前後進検出手段(90)を設け、この前後進検出手段(90)の後進検出信号を条件として上記制御装置(163)により、走行車体(2)の旋回時において、旋回内側の走行推進体(11)の駆動を連続的に入として制御するものである。
(もっと読む)
農作業車
【課題】 旋回制御にあっては、目標の180度の操向旋回や作業条合わせ等を自動的に行なわせることが難しい。
【解決手段】 ステアリングハンドルの切れ角を検出するハンドル切れ角センサと、左右の後車輪へ伝動する伝動軸と、該伝動軸の回転を検出する車軸回転センサと、後車輪のサイドクラッチを設け、車体の後部に苗植装置を昇降可能に装着し、苗植装置を上昇させると車軸回転センサにより回転数のカウントを開始し、伝動軸の回転数のカウント値が第一の目標回転数N1に到達したことを車軸回転センサが検出するのに起因して苗植装置を自動的に下降させる信号を出す旋回連動制御装置を設け、該旋回連動制御装置は、伝動軸の回転に対するハンドル切れ角θの関係に基づいて補正値n0を演算し、該補正値n0により前記第一の目標回転数N1を補正する構成とした。
(もっと読む)
苗植機の苗植制御装置
【課題】 苗植条行程の終端部で走行方向の折返旋回操向を行うときは、操作タイミングが難しく、このタイミングのずれによって苗植付け条間間隔や、植付位置の不揃い等が生じ易い。
【解決手段】 ステアリングハンドルの操向により、車体に対して苗植装置を上昇すると共に、植付クラッチ5を切りにして走行旋回する苗植機において、この折返し走行旋回位置をGPSから入力することことによって、前記苗植装置を下降して植付クラッチ5を入りにする。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 操舵ハンドルとオペレータシートを備え、転向車輪と後輪の4輪で駆動する構成とし、機体後部に昇降部を介して昇降可能に植付部を設けた田植機において、旋回時のハンドル操作又は植付部の上昇に基づいてドライブシャフト回転のカウントを開始し、該カウントが第一の所定値になるのに起因して、植付部を下降し、前記カウントが第二の所定値になるのに起因して、植付クラッチを入にする連動制御を備え、機体の後進をマイナスして後進を累積して前記カウントをカウントする制御装置を設けた。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバイン等の走行車両において、主変速レバーと操向ハンドルとを直進用及び旋回用HST機構に連動連結するための機構を簡素化する。
【解決手段】互いに直交する2つの軸線回りに回動可能な単一の制御体を収容ボックスに内蔵する。制御体は、操向ハンドルの操作にて縦軸線回りに回動し、且つ、主変速レバーの操作にて横軸線回りに回動するように構成する。収容ボックスには、旋回用変換軸と直進用変換軸とを、互いの軸線が実質的に同一平面上に位置した状態で回動可能に軸支する。更に、各変換軸の回動量を検出する回動角センサ140,180と、各HST機構の制御軸に関連させた電動モータ141,181と、各回動角センサ140,180の検出情報を用いて各電動モータ141,181を駆動させるコントローラ200とを備える。
(もっと読む)
乗用作業機
【課題】乗用作業機の畦越えや車両への積み降ろし時の自走移動を、地上からの操縦によって安全かつ的確に行えるようにする。
【解決手段】走行機体3の前部に、走行機体3側に後退した第1姿勢と、走行機体3の前方に突出した第2姿勢とに切り換え可能に構成した握り操作具16を備え、握り操作具16を第2姿勢に切り換えた状態での握り操作具16の下方への押し下げ操作により前輪1の操向作動を牽制阻止するように構成する。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバイン等の走行車両において、主変速レバーと操向ハンドルとを直進用及び旋回用HST機構に連動連結するための機構を簡素化する。
【解決手段】互いに直交する2つの軸線P,S回りに回動可能な制御体131を備える。制御体131は、操向ハンドルの操作に伴う縦軸線P回りの正逆回動にて旋回用HST機構を作動させ、主変速レバーの操作に伴う横軸線S回りの正逆回動にて直進用HST機構を作動させるように構成する。制御体131の縦軸線P回りの回動量を旋回用HST機構の制御量に変換する旋回出力軸164の軸線AX2と、制御体131の横軸線S回りの回動量を直進用HST機構の制御量に変換する中間軸155の軸線とを実質的に同一平面上に位置させる。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
作業車の制御装置
【課題】前輪増速手段又は自動上昇手段を適切なタイミングで作動させることができ、位置合わせ走行の作業性を向上できる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、前輪2を後輪3の周速度よりも速く増速駆動させる前輪増速手段51を備え、前輪2の切れ角が所定増速角度β1以上であると前輪増速手段51が作動するように構成し、車体1の作業走行経路に対する位置合わせ走行を推測する推測手段54を備え、推測手段54により位置合わせ走行が推測されると、前輪増速手段51が作動しないように構成してある。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
作業車の制御装置
【課題】圃場の状況や作業の内容に合わせて、精度よく車体の状態を作業状態から非作業状態に切り換えることができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、操縦ハンドル6の操舵速度がしきい値以上で、且つ、前輪2の切れ角が所定角度以上であると、車体1の状態を作業状態から非作業状態に切り換える車体状態切換手段51,53を備えて、車速検出手段63により検出した車速が速くなる程、しきい値Kを高く設定してある。
(もっと読む)
作業車の制御装置
【課題】旋回作業に伴うものでない可能性の高い操縦ハンドルの操作で作業装置が自動的に上昇することを防止し、作業装置の上昇を適切なタイミングで行うことができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、切れ角が所定上昇角度α1以上になると、作業装置Rを上昇させる自動上昇手段53を備え、操縦ハンドル6が右側又は左側の一方側に操作された直後に、操縦ハンドル6が右側又は左側の他方側に操作され、他方側への操縦ハンドル6の操作により切れ角が所定上昇角度α1以上になった場合に、自動上昇手段53が作動しないように制御する制御手段を備えてある。
(もっと読む)
作業車両
【課題】作業習慣や好みに応じて作業を選択する場合、煩わしい操作に時間を空費する課題を解決する。
【解決手段】少なくとも四輪駆動の使用の有無、旋回時におけるブレーキ力、後進時に作業機を自動的に上昇させるバックアップ制御の使用の有無の組み合わせから構成した複数の作業モードを、スイッチのON、OFF操作で切替選択ができる構成としている作業車両において、作業習慣や好みに基づいて使用する作業モードを、予め選択して登録できる構成とし、この登録した内容を選択することにより、予め登録している作業モードが自動的に設定される構成としたことを特徴とする作業車両の構成とする。
(もっと読む)
第1の農業機械と並行して田畑一面を走行するように操縦することができる第2の農業機械を操縦するための方法および装置
本発明は、第1の農業機械(10)に対して相対的に、田畑(34)一面で操縦することができる第2の農業機械(12)を操縦するための方法および装置に関し、
距離計(60)であって、農業機械(12)の1つの上に搭載され、水平領域にわたる隣接した対象物の方向および距離に関する測定値を記録するように動作することができる、距離計(60)と、
評価手段(68)であって、距離計(60)に接続され、操縦信号を出力するように設計され、その操縦信号は、距離計(60)の測定値に基づき、第1の機械(10)に対して相対的に第2の機械(12)を誘導する、評価手段(68)とを備える。
評価手段(68)は、距離計(60)によって時間的に連続して記録された、複数の測定値を参照して、記録された測定値から、距離計(60)を備えていない機械(10)に割り当てることができる測定値を選択し、そして選択された測定値を使用して、操縦信号を生成するように、動作することができることが提案されている。 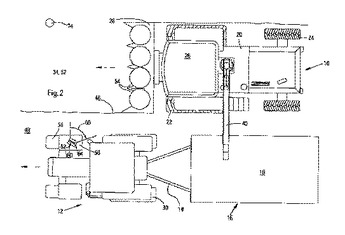 (もっと読む)
(もっと読む)
田植機
【課題】後輪の駆動トルク不足による走行機能の低下や、それに伴う他機能の低下を防止する。
【解決手段】前輪2及び後輪3で支持される走行機体1にエンジン4を搭載し、該エンジン4の動力で少なくとも後輪3を駆動させる田植機において、前輪車軸19L、19Rに電動アシストモータ20L、20Rを連繋し、該電動アシストモータ20L、20Rを、後輪3の駆動トルク不足に応じて駆動させる。また、前輪2を操舵するステアリングハンドルの切れ角が設定角度以上となったとき、旋回外側の前輪車軸19L、19Rに連繋された電動アシストモータ20L、20Rを駆動させる。
(もっと読む)
田植機
【課題】 次回の走行指標を田面に形成するマーカを機体横方向に突出した作用姿勢と機体側に後退した格納姿勢とに切換え可能に装備した田植機において、マーカを畦などの障害物に不用意にぶつけてしまうことを未然に回避できるようにする。
【解決手段】 走行機体3が障害物Bに接近することを検知する検知手段38を備え、障害物Bへの設定以上の接近が検知されると作用姿勢のマーカ12を自動的に格納姿勢に切換えるマーカ自動切換え手段を備えてある。
(もっと読む)
走行車両
【課題】四輪自動車と同じような操作感覚で運転(操縦)可能なコンバイン等の走行車両において、主変速レバー13と操向ハンドル10とを直進用及び旋回用HST機構53,54に連動連結するための機構を簡素化する。
【解決手段】互いに直交する2つの軸線回りに回動可能な単一の制御体を収容ボックス120に内蔵する。操向ハンドル10の操作にて縦軸線回りに回動し、且つ、主変速レバー13の操作にて横軸線回りに回動するように構成する。収容ボックス120には、旋回出力軸164と中間軸155とを、互いの軸線が実質的に同一平面上に位置するようにして回動可能に軸支する。収容ボックス120は、左右の走行クローラ2の間に位置する両HST機構53,54の近傍に位置するように、操縦部9の床面を構成するステップ床部材111の下面側に配置する。
(もっと読む)
161 - 180 / 379
[ Back to top ]