
Fターム[2B043BA02]の内容
農業機械一般(操向) (6,001) | 車両の種類 (615) | 乗用車両 (395)
Fターム[2B043BA02]の下位に属するFターム
4輪操向車両 (16)
Fターム[2B043BA02]に分類される特許
21 - 40 / 379
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
作業車両

【課題】単一のブレーキぺダルを備えた作業車両において、路上走行を安全にしながら、圃場作業時にはエンジンの回転数、ステアリングハンドルの操作位置状態から自動的に旋回走行する装置を提供する。
【解決手段】アクセルレバーにより回転数を調節できるエンジンと、該エンジンの回転数を検出するエンジン回転数センサと、ステアリングハンドルの操作状態を検出するハンドル切れ角センサとを設け、前記エンジン回転数センサが所定の作業回転数を検出し、前記ハンドル切れ角センサが最大切れ角に対して所定比率以上のハンドル切れ角を検出すると、前記ステアリングハンドルの切り側の左右ブレーキアクチュエータ24L、24Rを作動し左右ブレーキ作動手段の左右ブレーキ作動部の一方をだけを作動し片ブレーキ作動状態で旋回走行させるコントローラを設けたことを特徴とする作業車両の構成とする。
(もっと読む)
作業車両
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
トラクタ
【課題】左右ブレーキの連結を自動的に確保し、路上走行の安全を図る。
【解決手段】走行車体に左右に並設されている左右ブレーキぺダルと、該左右ブレーキぺダルを連結状態としたりあるいは非連結状態とするブレーキ連結解除手段と、ロータリ耕耘装置を昇降回動するリフトアームと、作業モードを走行軽作業モードと耕耘重作業モードに切り換える作業切換ダイヤルと、前記リフトアームの昇降状態を検出するリフトアーム昇降センサと、前記ブレーキ連結解除手段を切換作動するブレーキ連結解除アクチュエータとを備えたトラクタにおいて、前記作業切換ダイヤルを耕耘重作業モード以外への切換状態で、前記リフトアーム昇降センサが前記リフトアームの所定高さ以上の上昇検出をすると、左右ブレーキ連結解除アクチュエータを連結作動し非連結状態にあるブレーキ連結解除手段を左右連結状態にするコントローラを設けたことを特徴とするトラクタとする。
(もっと読む)
植付作業機
【課題】マーカアームを上下揺動させるために支持部材に設けられた回動部材及び電装品を、カバー体によって覆って保護するにあたって、該カバー体の形状を簡素化できる植付作業機を提供することを課題としている。
【解決手段】マーカアーム36を支持部材41に支持し、マーカアーム36の下方揺動を規制する規制部43と、規制部43を回動部材43を介して上下回動作動させる電動アクチュエータ44と、回動部材46の回動位置を検出する検出センサ47とを備え、前記マーカアーム36を下方側に付勢する付勢部材42により、マーカアーム36を規制部43とともに上下揺動する植付作業機であって、マーカアーム36及び規制部43を支持部材41の前面側に配置するとともに、電動アクチュエータ44及び検出センサ47を含む電装品55並びに回動部材46を支持部材41の後面側に配置し、回動部材46及び電装品55を覆って保護するカバー体48を設けた。
(もっと読む)
作業車両
【課題】操向位置を検出する検出センサをシンプルな構成で容易に走行機体側へ設置できるとともに、設置した検出センサが圃場から飛散した泥水等の付着によって故障することを防止できる作業車両を提供することを課題としている。
【解決手段】操向位置を検出する検出センサ48を備えた作業車両であって、ステアリングシャフト33の回転を減速して前記検出センサ48に伝える減速機構47を、該ステアリングシャフト33に設け、検出センサ48からのステアリングシャフト33の回転によって、操向位置を検出する。
(もっと読む)
作業機
【課題】機体の旋回走行が終了して次回の作業行程にて作業走行するときに、作動部を時間遅れなく作動状態にすることが可能となる作業機を提供する。
【解決手段】電動モータM3の操作によって作動状態と非作動状態とに切り換え操作自在な作動部が、作動状態側に切り換えてから起動用所要時間が経過したのちに作動状態に切り換わるように構成され、旋回行程中における機体の位置を検出する機体位置検出手段51と機体の走行速度を検出する車速検出手段50との検出情報に基づいて、機体が旋回走行を開始したのちに旋回終了位置に至ると予測される時点よりも起動用所要時間に相当する時間だけ前の時点における機体位置に至ると予測されるタイミングを求めて、そのタイミングにて電動モータM3を作動状態側に切り換える作動部操作手段53と、前記タイミングを補正する人為操作式のタイミング補正手段100とが備えられている。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
田植機のステアリングコラム
【課題】ステアリングシャフトとトルクジェネレータの連結部の錆付きを防ぐとともに、グリス注入を容易として作業性を向上させた田植機を提供する。
【解決手段】ステアリングハンドル軸53,55にステアリングコラム56を覆設したステアリングシャフト52の下端を、トルクジェネレータ58に連結部57を介して連結し、連結部57では、カラー59を装着したステアリングシャフト52の下端部を、取付フランジ61を介してトルクジェネレータ58に支持させ、カラー59は、トルクジェネレータ58の上面に接する底部周面に、開口部60を形成するとともに、取付フランジ61の底部にも開口部60と連通する開口部63を形成したものである。加えて、カラー側開口部60と、取付フランジ側開口部63のそれぞれを組立てることによって、ラビリンス形状Lを構成した。
(もっと読む)
苗移植機
【課題】圃場の浅い深いに拘わらず、常に直進の指標となるマークを圃場に引くことができる線引きマーカ1を備えた苗移植機を提供すること。
【解決手段】車体5の後側に複数条分の苗を積載する苗タンク20と植付装置7と苗タンク昇降用のリンク機構6を備え、圃場に植え付けた苗の上方に位置して直進の目安とするサイドマーカ57と圃場面に接触して直進の目安となる線を引く線引きマーカ1と任意の植付装置7の駆動を入切する部分条クラッチの入切を行う部分条クラッチレバーを設け、 圃場の深浅に合わせてサイドマーカ57の上下位置を自動調節するサイドマーカ自動調節機構と部分条クラッチレバーの操作に合わせて線引きマーカ1の左右位置が自動的に変更される線引きマーカ位置自動変更装置を備えた苗移植機である。
(もっと読む)
走行車両
【課題】 本発明の課題は、8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供することである。
【解決手段】 走行車両において、ステアリング機構に連動して旋回内側の走行推進体の駆動力を断つか制動する旋回連動機構と、走行推進体の伝動軸回転数検出手段と、走行車体の旋回時に、伝動軸回転数検出手段の検出による左右の走行推進体の回転数に基づき、旋回内側の走行推進体の回転数が旋回外側の走行推進体の回転数よりも小さい該旋回外側の走行推進体の回転数の所定値以下になれば、旋回内側の走行推進体を駆動することにより、旋回内側の走行推進体を駆動する状態と旋回内側の走行推進体の駆動力を旋回連動機構により断つか制動する状態を繰り返す断続的制御を実行する制御装置を備えた。
(もっと読む)
水田作業車
【課題】水田作業車において、右又は左のマーカーが自動的に作用姿勢に操作される機能及び作業装置が自動的に作業状態に操作される機能を備えた場合、両方の機能を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
田植機
【課題】 本発明の課題は、機体旋回後の農作業装置の取扱いを可能な範囲で旋回動作と連動して自動処理することにより、オペレータの負荷を最小限度に抑えることができる自動植付作業車用制御装置を提供する点にある。
【解決手段】 旋回開始時のハンドル操作に基づいて後輪のドライブシャフト回転のカウントを開始し、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上でなく直進状態に戻した操作状態であることを条件に、更にその後、前記カウントが植付部を下降させたときの第一の所定値よりも大きい第二の所定値になったとき、植付クラッチを入にする連動制御を備え、植付部が下降状態で、その後の操舵ハンドルのハンドル角度が規定値以上であれば、連動制御を終了する制御装置を設けた田植機とした。
(もっと読む)
苗移植機
【課題】簡易な構成の旋回内側の伝動調節によってコストの低減とやメンテナンス性の向上を図り、突然のスリップ発生にも対応を可能として植付精度と作業能率を確保でき、かつ、旋回に必要な出力の確保が可能となる苗移植機を提供する。
【解決手段】苗移植機は、全輪駆動の前後輪10,11を備えた走行車体2と、前輪10のデフロック機構51a付きデフ装置51と、後輪11のクラッチ機構18cと、旋回内側の後輪伝動を停止する制御ロッド部材52と、旋回時に昇降リンク機構3により上昇可能に支持した植付装置4とを備えて構成され、上記左右のクラッチ機構18c,18cの動作規制により左右の後輪動力を維持可能に設定するクラッチ設定機構53を設け、機体旋回時の前輪10のスリップによるデフロック機構51aの作動とともに植付装置4の上昇位置を低く抑える上昇規制機構Cを上記昇降リンク機構3に設けたものである。
(もっと読む)
作業車
【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
田植機
【課題】正面にポールを立設することなく、簡易な操作で苗を整列させることができる田植機を提供することを目的とする。
【解決手段】往路又は復路において、操作者がGUI151a又は151bを選択することによって、右フロントカメラ又は左フロントカメラが撮像した画像を撮像表示部151に表示させる構成とした。また既設の情報表示部と撮像表示部151とを一体化した。またいわゆるバックモニタとして撮像表示部151を使用できる構成とした。
(もっと読む)
田植機
【課題】圃場の環境に左右されることなく、進行方向と苗の並び方向とを確実に整合させることができる田植機を提供する。
【解決手段】左フロントカメラ及び右フロントカメラ21にて圃場に植え付けられた苗を撮像し、撮像された苗を表示部8に表示する。操作者は、表示部8に表示された苗の並び方向を確認して田植機を操舵し、表示部8に表示された線を最も端に位置する苗の列に一致させて、進行方向と苗の並び方向とを整合させることができる構成とした。
(もっと読む)
田植機
【課題】操作者が植付部に苗を補給している間であっても、苗を整列させて植付けることができる田植機を提供する。
【解決手段】CPUは、自動走行スイッチがオンになっている場合に、左右方向において、表示部に表示された線の中央と苗の列との距離を求め、求めた距離に応じた操舵量を演算する。操舵量を演算したCPUは、電磁切換弁201に切換信号を出力する。走行部1は、演算された操舵量だけ右又は左に操舵される。操舵終了後は、電磁切換弁201を中立位置に戻し、走行部を直進させる。
(もっと読む)
コンバイン
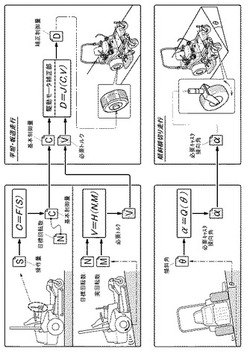
【課題】オペレータが要望するフィーリング(操作感覚)に細かく対応することができて、オペレータの旋回操作上の要求を十分に満足させ得るようにすること。
【解決手段】駆動源の動力によって走行する走行機体と、該走行機体を旋回操作するための操向手段と、該操向手段に設けられ前記走行機体の旋回量を微調節するための旋回量微調節手段と、を有するコンバインであって、前記旋回量微調節手段による前記走行機体の旋回量の調節量は、前記旋回量微調節手段の操作量に対応させて変更可能に構成した。旋回量微調節手段による走行機体の旋回量の調節量は、旋回量微調節手段の操作量に対応させて変更可能に構成しているため、オペレータは、旋回量微調節手段の操作量を変更することで、簡単に旋回量微調節手段による走行機体の旋回量の調節量を変更することができる。
(もっと読む)
21 - 40 / 379
[ Back to top ]