
Fターム[2B043BB04]の内容
農業機械一般(操向) (6,001) | 農業機械の作業別の種類 (591) | 施肥機、播種機又は移植機 (244)
Fターム[2B043BB04]の下位に属するFターム
湛水直播機
田植機 (208)
Fターム[2B043BB04]に分類される特許
21 - 36 / 36
移植機
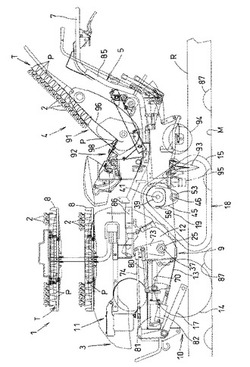
【課題】 移植機が、凹凸の多い走行面を走行しても、苗を精度良く植え付けることができる歩行型の移植機を提供する。
【解決手段】 走行体3は、走行機体9の左右両側に、左右軸回りに回転駆動される駆動軸41と、駆動軸41より下側に位置していて左右方向の軸芯を有する揺動支軸46と、畝間溝Mを走行するクローラ式走行装置18とを備え、クローラ式走行装置18は、駆動軸41と一体回転する駆動輪47と、駆動輪47より下側に位置する前後のアイドラ48,49と、前後アイドラ48,49間に位置する転輪50と、駆動輪47,前後アイドラ48,49及び転輪50にわたって巻き掛けられたクローラベルト15と、上部が揺動支軸46に揺動自在に支持され下部に前後アイドラ48,49と転輪50とが回転自在に支持された揺動フレーム51とを備え、植付体93を左右のクローラ式走行装置18の間で且つ前後方向に関して揺動支軸46の近傍に位置させる。
(もっと読む)
作業車の走行制御装置

【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
圃場作業車両
【課題】圃場における機体旋回の際に、旋回内側の前輪と隣接植付条との干渉を小さく抑えつつ、機体を容易に転向することができる圃場作業車両を提供する。
【解決手段】圃場作業車両は、左右の支持輪(3)および左右のサイドクラッチを介設して旋回駆動可能な左右の駆動輪(2)によって走行可能に支持された機体(4)に圃場作業装置(6)を搭載して構成され、上記左右の支持輪(3)には、それぞれの支持高さ位置を変更する支持調節部(3a)を設け、この支持調節部(3a)により左右のサイドクラッチの一方の遮断動作に応じて同じ側の支持輪(3)を他側に対して高く支持するクラッチ連動手段(18)を設けたものである。
(もっと読む)
歩行型野菜苗植付機
【課題】簡易なレバー操作により、畝との干渉を生じることなく、機体の旋回が可能となる歩行型野菜苗植付機を提供する。
【解決手段】歩行型野菜苗植付機は、左右の駆動輪(2)と、機体旋回を可能とする変速伝動機構(11)と、機体を昇降する機体リフト機構(16)と、機体後部の押し下げ操作を可能とするハンドル(14)と、このハンドル(14)に取付けられて機体の旋回操作をするための左右のクラッチレバー(15)とを備えて野菜苗を植付け走行可能に構成され、上記左右のクラッチレバー(15)は、レバー操作と対応して変速伝動機構(11)および機体リフト機構(16)を制御する制御手段(20)を備え、この制御手段(20)により、機体リフト機構(16)が機体リフト動作を終了した後に変速伝動機構(11)が旋回伝動をする制御処理を構成したしたものである。
(もっと読む)
作業機の案内装置
【課題】 案内部を軽量化することができるようにする。
【解決手段】 本発明の作業機の案内装置5は、該作業機の進行とともに圃場Hに形成された案内溝を倣うように構成された案内部21と、案内部21及び作業機の操向機構を連結するアーム23とを備え、アーム23は、案内部21が地面の上下変動に追従可能に、作業機1に対して案内部21を左右に延びる第一軸33で上下回動可能に軸支している。そして、下端側が第一軸33よりも案内部側に対し左右に延びる第二軸45で回動自在に軸支されたレバー46と、一端側がレバー46の上端側に対し左右に延びる第三軸47で回動自在に軸支されるとともに、他端側が第一軸33よりも作業機側に対し左右に延びる第四軸48で回動自在に軸支されたリンク49と、アーム23及びレバー46間の第二軸45を中心とした開き角Bを小さくするように付勢する付勢手段50とを備えたクッション機構24を有する。
(もっと読む)
苗移植機
【課題】狭い領域での苗の植え付けなどの農作業を的確に行える苗移植機を提供すること。
【解決手段】電動モータ駆動式の前後輪3,4を支持する走行車体1の上方に苗供給装置16を配置し、車体1の下方に苗植付装置7を配置し、車体1を貫通して苗供給装置16と苗植付装置7をほぼ水平方向に回動自在に連結するピン12と該ピン12を回転自在に支持するバブ6を備えている苗移植機であり、狭い間隔で多量の苗を植えるネギなどの苗移植機として使用できる。
(もっと読む)
作業車
【課題】 作業車において、操作制御が適切なタイミングで行われるように構成する。
【解決手段】 車輪の回転数に基づいて機体の走行距離を検出する走行距離検出手段と、操向操作自在な車輪の操向角度を検出する操向角度検出手段とを備える。走行距離検出手段で検出された機体の走行距離と、操向角度検出手段で検出された車輪の操向角度とに基づいて、操作制御を行う操作制御手段を備える。
(もっと読む)
作業車
【課題】 作業車において、操作制御が適切なタイミングで行われるように構成する。
【解決手段】 車輪の回転数に基づいて機体の走行距離を検出する走行距離検出手段と、作業地に対する車輪のスリップ率を検出するスリップ率検出手段とを備える。走行距離検出手段で検出された機体の走行距離と、スリップ率検出手段で検出された車輪のスリップ率とに基づいて、操作制御を行う操作制御手段を備える。
(もっと読む)
農作業車
【課題】 機体を容易に旋回させることができるようにする。
【解決手段】 本発明の農作業車1は、走行手段2により走行自在に支持された機体4に、作業者Mが着座する座部5と、走行手段2を駆動する駆動手段7と、駆動手段7を制御する制御手段6と、制御手段6に対する操作指示を入力する入力手段8とが装備されている。走行手段2は、機体4の後端部に軸支された後輪22と、その前側に軸支された前輪21とを備えている。機体4は、前輪21及び後輪22を接地させると作業者Mを乗せて走行可能な乗車用姿勢となり、機体4の前側を持ち上げると後輪22を支点に略起立し旋回可能な旋回用姿勢となるように構成されている。制御手段6は、入力手段8からの速度切替指示に応じて、前記乗車用姿勢に対して設定された速度で走行させる乗車用制御状態と、前記旋回用姿勢に対して設定された速度で走行させる旋回用制御状態とを切替可能に構成されている。
(もっと読む)
畑作用苗移植機
【課題】 従来の6輪構成では、機体の安定した支持は得られるが、前輪及び後輪の左右方向の向きが変向できない構成であるため、機体の操向性、畝に対する追従性が悪くなる問題がある。
【解決手段】 本発明は、左右一対の前輪(5),(5)、駆動輪(6),(6)、尾輪(7),(7)を前側から順に配備して6輪構成とする。畝の斜面に接触する畝案内ローラ(16),(16)を左右移動自在に設ける。畝案内ローラ(16),(16)の左右移動に関連して前輪(5),(5)を操舵すべく連動構成する。尾輪(7),(7)は操舵自在に構成する。
(もっと読む)
農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法
【課題】各種農作業を支援する機器が、農作業に従事する人に何ら負担を掛けることなく、農地に作られた畝に添って正確に自律走行し、生育した作物の収穫作業支援や農薬散布など、各種農作業を確実に支援できるようにする、農作業支援機器のための農業用資材と該農業用資材を用いた農地、並びに該農地における農作業支援機器の進行方向認識方法を提供することが課題である。
【解決手段】農地に作られた畝を覆うマルチフィルムの、埋設位置内側の長手方向に畝位置認識用の線を設け、農作業支援機器がその畝位置認識用の線を認識することで農地に作られた畝に添って正確に自律走行できるようにした。
(もっと読む)
農作業機の走行装置
【課題】 苗移植機のように圃場の一定方向に沿って平行方向の苗植付条を形成するように作業する形態が一般的である場合、未耕起の圃場面や、平面耕起による圃場土壌面での作業では、対地作業の平行的走行が難しく、不揃いの作業形態となり易く、高度の作業操作感覚、及び操作技術を要することとなる。
【解決手段】 左右一対の走行車輪1を有する対地作業機において、左右各車輪1の土壌踏面幅を作溝する作溝器2を配置して、この作溝器2による左右各作溝条底に沿って各車輪1を踏圧案内させて走行させることを特徴とする農作業機の走行装置の構成とする。
(もっと読む)
苗移植機
【課題】畝溝の幅が異なるいずれの圃場に対しても、前輪と鎮圧輪を畝溝上を直進性良く走行させることができる苗移植機を提供すること。
【解決手段】左右一対のガイド輪8,8はガイド輪軸17eに支持されるが、該ガイド輪軸17eのガイド輪取付位置は左右方向に変更可能であるので、畝溝の幅に合わせてガイド輪軸17eの左右方向幅を調整して、ガイド輪8,8の左右に畝Uの傾斜面の下端部に当接させた状態で、機体を畝溝に沿って前方に案内することができる。こうして後輪2が畝Uの上面を走行する構成でありながら、前輪3及びガイド輪8,8により、精度良く機体の進行方向を維持できる。また、ガイド輪8,8の間には前輪3があり、該前輪3のタイヤ幅は苗植付具60が苗を植え付け易い大きさに設定されている。また前輪3の畝溝鎮圧力はスプリング3bで付勢された支持部材17cで調整して、圃場の硬さに応じて変更可能になっている。
(もっと読む)
苗移植機移送装置
【課題】
ハウス内に畝を複数形成して苗移植機で苗移植をする施設に関して、ハウス内のスペースをできるだけ利用して畝を長く形成し、できるだけ多くの作物を収穫できることを課題とする。
【解決手段】
複数の畝を形成するハウス内に、畝に苗を移植する苗移植機を吊り上げる吊り上げ手段と、該吊り上げ手段が移動するとき案内する案内手段とをハウスの天井付近に設け、
前記苗移植機が畝を跨いで苗移植作業を行ないながら走行するとき前記吊り上げ手段は案内手段に沿って移動し、前記苗移植機が隣接する畝間を移動するときには前記吊り上げ手段が苗移植機を吊り上げた状態で前記案内手段に沿って移動する構成とする。
(もっと読む)
作業車両
【課題】移動局を前輪と後輪の間で、かつ本機の左右略中央に脱着可能に設置する構成の場合は、設置時に移動局を手で持ったままの状態で本機に搭乗しなければならず、更に本機に立設した正面視門型に構成したフレームの横架部に設置しなくてはならないため、設置し辛く、手間がかかっていた。
【解決手段】GPS103のアンテナ1の下部に棒状部材22を脱着可能に取り付け、作業車両101に該棒状部材22を脱着可能に取り付けるための取り付け部2を設けた。
(もっと読む)
21 - 36 / 36
[ Back to top ]