
Fターム[2B052DC02]の内容
施肥 (4,104) | 施肥機における検知、検知信号の処理又は表示 (262) | 検知対象 (131) | 施肥機の走行速度 (34)
Fターム[2B052DC02]に分類される特許
1 - 20 / 34
薬剤散布装置
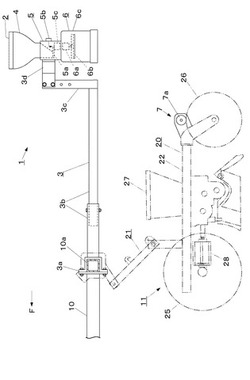
【課題】 播種機又は移植機に簡単かつ汎用的に取り付けることができるとともに、誤作動による薬剤の散布を防止することができるようにする。
【解決手段】 本発明の薬剤散布装置1は、播種機11の後側で圃場に薬剤を散布するものである。前記播種機11の鎮圧輪26の回転を検出する回転センサー7を備え、薬剤の散布停止中に、所定の開始待ち時間に亘って該回転センサー7が該回転を検出し続けると薬剤の散布を開始し、薬剤の散布中に、所定の停止待ち時間に亘って該回転センサー7が該回転を検出しないと薬剤の散布を停止するように構成されている。
(もっと読む)
作業車両

【課題】肥料の過多や不足などがなく、圃場に応じた適切な施肥が行え、圃場全体の肥料濃度を均一にできる施肥装置を備えた作業車両の提供である。
【解決手段】苗植装置4を搭載した作業車両に、施肥量調節板41を駆動して施肥量を調節する調節モータ6と、調節モータ6により回転する回転軸7と、回転軸7の回転により軸方向に移動する指示針9と、指示針9の移動量を検出するストロークセンサ14と、走行しながら土壌中の肥料濃度を検出する肥料濃度センサ71と、センサ71による検出値に基づき基準施肥量を算出する基準施肥量算出部とストロークセンサ14による検出値に基づき調節板41の調節施肥量を算出する調節施肥量算出部とを備え基準施肥量算出部による施肥量に調節施肥量算出部による施肥量が一致するように調節モータ6を駆動すると共に両算出部の施肥量が一致すると調節モータ6を停止させる制御装置72とを備えた施肥装置5を設ける。
(もっと読む)
作業機
【課題】走行車両によって移動されながら圃場に作業を施す作業機の移動速度に、作業装置を駆動する電動モータの回転速度を自動同調させる場合、作業機の移動速度が低速になると電動モータの同調回転速度も低速となり、作業開始時には、電動モータの立ち上がりが遅くなって、無作業区間が拡大すると共に、電動モータによる作業量が少なくなって、無作業区間の後に供給される肥料や種子等が不足し、無作業区間における肥料や種子等の不足を緩和しにくくなる、という問題があった。
【解決手段】作業開始時に、接地式移動速度検知装置42により、施肥播種機2の移動速度Vを検知するのに必要な速度検知時間の間、自動同調制御中の回転速度よりも大きな一定の予備回転速度Rmにより、繰出モータ52を回転させて予備回転を行う、供給制御機構1を設けた。
(もっと読む)
作業機
【課題】機体の旋回走行が終了して次回の作業行程にて作業走行するときに、作動部を時間遅れなく作動状態にすることが可能となる作業機を提供する。
【解決手段】電動モータM3の操作によって作動状態と非作動状態とに切り換え操作自在な作動部が、作動状態側に切り換えてから起動用所要時間が経過したのちに作動状態に切り換わるように構成され、旋回行程中における機体の位置を検出する機体位置検出手段51と機体の走行速度を検出する車速検出手段50との検出情報に基づいて、機体が旋回走行を開始したのちに旋回終了位置に至ると予測される時点よりも起動用所要時間に相当する時間だけ前の時点における機体位置に至ると予測されるタイミングを求めて、そのタイミングにて電動モータM3を作動状態側に切り換える作動部操作手段53と、前記タイミングを補正する人為操作式のタイミング補正手段100とが備えられている。
(もっと読む)
防除作業機
【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
肥料散布装置用作業条件算出装置
【課題】肥料散布時に簡単に作業条件を算出可能であり、従来の肥料散布機にも使用可能な肥料散布装置用の作業条件算出装置を安価に提供する。
【解決手段】作業条件算出装置5は、作業走行速度と単位面積当たりの肥料散布量と散布する肥料の特性値の入力部を有し、入力部よりの各入力により肥料散布装置2のシャッタ部の開口量を算出してシャッタ開度を表示する表示部51を設けて肥料散布装置2とは別体で構成されている肥料散布装置用の作業条件算出装置5による。
(もっと読む)
苗移植機
【課題】苗移植機の走行速度の変動があっても施肥装置から繰り出される肥料の繰出量が単位圃場面積当たりでほぼ一定になるようにした施肥装置を備えた苗移植機を提供すること。
【解決手段】車速センサ112により走行車体2の走行速度に基づき施肥装置5の繰出しロール73A,73Bの回転速度を肥料繰出電動モータ159により予め設定された変更量で変更することで、該回転体73A,73Bの回転速度が変わっても、回転体73A,73Bに供給される肥料の量を一定量に保つことができる。例えば車速が速くなると繰出しロール73A,73Bの回転が比例関係以上に遅くなり、該ロール73A,73Bが一度に排出する肥料の量が減少して肥料不足になることが防止され苗の生育が良好となり、車速が遅くなるとロール73A,73Bの回転が比例関係以上に速くなるように変更することで、ロール73A,73Bの回転速度を速くしてロール73A,73Bが一度に排出する肥料の量が増加して肥料が供給過剰になることが防止できる。
(もっと読む)
粉粒剤散布装置
【課題】散布作業中の車体旋回を検出してからオペレータの操作の軽減を図り、作業性を向上しようとする。
【解決手段】供給ホッパと、繰出装置と散布量設定手段を備え、設定散布量と走行車体の作業速度信号を入力するコントローラを設け、該コントローラは、散布スイッチの入り操作に基づき、少なくとも上記設定散布量情報と走行車体の作業速度信号とに基づき前記繰出ロールの繰出回転数を算出し、上記算出された繰出回転数となるように前記繰出ロール軸を駆動する駆動手段を制御するよう構成し、前記コントローラに、旋回自動スイッチと散布作業中に走行車体の旋回状態を検出する旋回検出手段を備え、該旋回自動スイッチが入り状態において、旋回検出手段で走行車体の旋回状態を検出するときは、前記駆動手段を停止し旋回復帰状態を検出すると前記駆動手段を作動出力制御する。
(もっと読む)
粉粒体施用作業車
【課題】粉粒体の散布に際して、経験による散布量の増減調節を要することなく、散布時の環境条件に応じて面積当たり散布量を高精度で確保することができる粉粒体施用作業車を提供する。
【解決手段】粉粒体施用作業車は、粉粒体を貯留する粉粒体タンク(11)と、この粉粒体タンク(11)から受けた粉粒体の繰出量を回転制御可能な繰出ロール(15,15)とを備え、設定された粉粒体の比重および面積当たり散布量に沿って、走行車速に応じて粉粒体を散布する粉粒体散布装置(2)を備えて構成され、上記粉粒体散布装置(2)は、粉粒体タンク(11)から繰出ロール(15,15)によって繰出される粉粒体について、環境湿度と対応して予め取得した繰出量の実測値に基づき、散布時の湿度による繰出量の変動を補正して繰出ロール(15,15)を回転制御するものである。
(もっと読む)
散布作業機
【課題】大量の肥料等の粒状物の散布が可能で、しかも前記散布量の調節が容易な肥料等の粉粒物散布装置を備えた散布作業機を提供すること。
【解決手段】肥料タンク10内から繰出ロール20により繰り出される肥料を一対の送風装置12からの搬送用空気により送風筒30と通気筒31から搬送して圃場に噴管14から散布する散布作業機において、一対の送風装置12の起動/停止をそれぞれ独立して行う電磁クラッチ9a,9bの作動で、肥料の設定噴出量と予め設定した規定噴出量との関係に基づいて一対の送風装置12のうちの1方又は両方を駆動制御する制御装置15を備えた散布作業機であり、例えば少量の粉粒体の散布の際には、どちらか一方の送風装置12のみ駆動して粉粒体の搬送と散布ができるので、消費馬力を小さくでき、燃費と騒音低減が従来より向上する。
(もっと読む)
散布機
【課題】車速に連動して、しかも左右の散布ブームから均等に粒状物が実際に噴出される肥料等の粉粒物散布装置を備えた散布機を提供することである。
【解決手段】回転することで肥料などを繰り出す左右一対の繰出ロール20をそれぞれに駆動モータ25で、それぞれ独立して駆動させて肥料などを機体左右方向に伸びた噴管14から圃場に散布し、左右の噴管14の先端に設けた肥料検出センサ27と車速センサ37の各検出信号に基づき、左右それぞれの噴管14の送風量を自動制御装置15で適正に制御する散布機である。
(もっと読む)
走行散布機
【課題】車速に連動して、しかも安定した状態で繰出ロールから粒状物(肥料)を散布することができる走行散布機を提供する。
【解決手段】粉粒体散布装置の肥料を繰り出す繰出ロールを駆動モータで駆動させて圃場に肥料を散布するとき、繰出ロールの回転数を車速に連動させ、かつ繰出ロールの駆動モータの回転数が設定上限値を超えた場合、自動的に車速を減速し、駆動モータの制御可能な回転数の範囲内に入るように制御する制御装置を備えた走行散布機であるので設定した通りに均一に肥料散布できる。また、繰出ロールの駆動モータの回転数が設定上限値を超えた場合、自動的に車速を減速し、駆動モータの制御可能な回転数の範囲内に入るので、オペレータはすぐに駆動モータの制御可能な回転数の領域外の作業速にあったことを認識できるので、すばやく対処できるメリットがある。
(もっと読む)
散布機
【課題】施用物を収容するホッパー又は異なる施用物を収容するサブホッパーのいずれの側に施用物が存在するかを適切に予測して、的確で、円滑な繰出排出を行わせることができる散布機を提供する。
【解決手段】散布機は、施用物を収容するホッパー2に異なる施用物を収容するサブホッパー2Cを設け、該ホッパーおよびサブホッパーの下方に、それぞれ対応して複数の繰出ロール1A,1B,1Cを備え、施用物の設定散布量に応じて前記繰出ロールを対応設定し、走行車速により前記繰出ロールを支持する繰出軸の回転数を制御するように構成され、排出スイッチをオン操作することによって、車速に関係なく繰出軸を回転させる繰出モータMへの駆動出力を前記設定散布量に基づき出力する構成としたものである。
(もっと読む)
走行散布作業機
【課題】GPS信号に基づき走行散布作業機の位置情報を得て、隣接位置での重複した農作業を行なうことがないようにした走行散布作業機を提供すること。
【解決手段】GPSより得られる位置情報から機体の直進方位と、旋回開始位置から90度旋回して旋回戻し位置(e地点)に達した後、さらに90度旋回して直進する隣接作業方位を求め、肥料噴管からの粉粒体の散布幅を読込み、求めた直進方位と隣接作業方位から両方位間の移動距離d1を算出し、隣接作業方位から隣接作業方位と旋回戻し位置の移動距離d2を算出し、移動距離d1から隣接作業方位と前記旋回戻し位置の間隔を差し引いて前記間隔(移動距離d1−d2)を算出し、旋回開始位置と旋回戻し位置の間隔(移動距離d1−d2)を位置情報に変換して旋回戻し位置を求め、旋回を開始すると粉粒体散布装置を駆動停止させ、隣接作業位置(f地点)に達すると粉粒体肥料散布装置を駆動開始させる。
(もっと読む)
可変散布装置
【課題】GPSからの速度情報が得られない場合にも常に車速を正確に知ることができる散布装置を提供すること。
【解決手段】GPSから位置情報と速度情報を受信するGPS受信機78によりGPSから速度情報を得て、車速センサ37から車輪4又は5の回転数を検出し、両方の速度情報に基づき肥料散布装置1による肥料散布量を算出し、GPS速度情報が得られないときには、車速センサ37で得られる車速に基づき車速を算出して肥料散布量を決める乗用管理機である。そして肥料などの散布途中でGPSからの車速データが得られなくなっても、車速データを補正しながらスリップの影響が少なく精度良い散布作業を継続できる。
(もっと読む)
作業機のパルス信号出力構造
【課題】作業機を走行停止させるための走行用動力の遮断操作を行なった後の作業機の慣性走行によって、作業機に連結した作業装置が無駄に作動することを防止する。
【解決手段】作業機に連結した作業装置14に作業機の情報をパルス信号に変換して出力するパルス信号出力手段22Bを備えた作業機のパルス信号出力構造において、走行用動力の回転数を検出する回転センサ23の出力に基づいて走行速度を演算する演算手段22Aと、作業機の進行方向を出力する進行方向出力手段Aと、走行用動力の断続情報を出力する走行用断続情報出力手段Bを備え、パルス信号出力手段22Bが、演算手段22Aの出力に基づいてパルス信号の周波数を変更し、かつ、進行方向出力手段Aの出力と走行用断続情報出力手段Bの出力に基づいて、パルス信号による作業機の走行状態の判別が可能となるようにパルス信号のデューティ比を変更するように構成してある。
(もっと読む)
粉粒状物の散布制御装置
【課題】散布開始時の無散布区間の減少、及び車速連動制御への移行の円滑化を図る。
【解決手段】散布スイッチ69のON出力から前記作業速度信号の入力を受けて車速連動制御モードに移行するまで散布開始制御モードを構成し、この散布開始制御モード中は前記駆動手段25による繰出回転数を予め設定した回転数で回転するよう構成し、この散布開始時制御モードの経過後、前記走行機体の作業速度信号の入力を受けて走行機体が所定の速度以上であるとき、又は速度変化が一定範囲内になるときまでは、前記繰出ロール種類の変更を規制する構成とした。また、散布開始制御モードの所定時間T1又は機体発信を促す警報出力の所定時間T2を長短設定変更する構成とした。
(もっと読む)
肥料散布制御装置
【課題】施肥作業中にオペレータが最も知りたい走行速度値、又は回転軸の回転数値を表示する。
【解決手段】肥料散布装置Bの走行速度、所定面積当たりの肥料散布量、肥料の物性を含む作業環境値を設定するとともに、記憶し、該作業環境値の設定後、記憶された走行速度設定値を読み出して表示する。
(もっと読む)
散布作業機
【課題】走行車体1に、ホッパ18に収容された肥料或いは薬剤などの散布原料の散布量を調節できるようにした散布装置10を備え、車速の検出に基づいて散布量を自動制御する制御手段43を備えている散布作業機において、種々の肥料や薬剤の性状に関わらず、適正な散布量の散布を行えるようにする。
【解決手段】作業モードとテストモードに切換えるモード切換手段38を備え、このモード切換手段38をテストモードに切換えることにより、所定車速での散布量となるように散布量調節手段19を制御して所定時間の間、散布原料を吐出させ、この所定時間の間に吐出した吐出量を基に散布量を補正するように構成した。
(もっと読む)
流動物散布装置
【課題】 流動物供給を迅速に行わせても、ノズル始動位置付近での供給もれを抑制できる流動物散布装置を提供する。
【解決手段】 供給対象物の流動物がタンク48から繰り出し機構によって供給されるノズル50を、移送機構43によって自走車体横方向に往復移動させて、ノズル50から流動物を供給対象箇所に落下供給する散布装置本体42と、移送機構43を操作する制御部とを備えている。ノズル50が始動位置LS,RSから設定距離D1を離れた設定増速位置Zに至るまでのノズル50の移動速度が、ノズル50が設定増速位置Zに至った後のノズル50の移動速度よりも低速になるよう、制御部が移送機構43を不等速駆動させる。
(もっと読む)
1 - 20 / 34
[ Back to top ]