
Fターム[2B052DC09]の内容
施肥 (4,104) | 施肥機における検知、検知信号の処理又は表示 (262) | 検知対象 (131) | 散布対象場所 (25)
Fターム[2B052DC09]に分類される特許
1 - 20 / 25
肥料散布装置及び肥料散布再開位置の設定方法
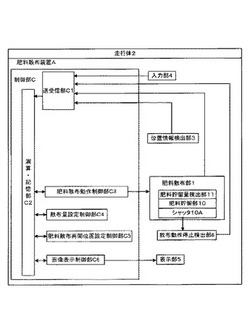
【課題】圃場の広さにかかわらず、肥料が切れた位置から肥料散布を再開する。
【解決手段】走行しながら肥料を散布する肥料散布部1と、肥料を貯留するとともに、肥料散布部1に肥料を供給する肥料貯留部10と、測位手段による位置情報に基づいて、肥料散布部1の位置情報を設定する位置情報検出部3と、肥料散布部1の肥料散布動作が停止したことを検出する散布動作停止検出部6と、肥料散布部1の肥料散布動作が停止したことを検出した時点の肥料散布部1の位置情報に基づいて、肥料散布再開位置を設定する肥料散布再開位置設定制御部C5とを備えた。
(もっと読む)
作業機

【課題】機体の旋回走行が終了して次回の作業行程にて作業走行するときに、作動部を時間遅れなく作動状態にすることが可能となる作業機を提供する。
【解決手段】電動モータM3の操作によって作動状態と非作動状態とに切り換え操作自在な作動部が、作動状態側に切り換えてから起動用所要時間が経過したのちに作動状態に切り換わるように構成され、旋回行程中における機体の位置を検出する機体位置検出手段51と機体の走行速度を検出する車速検出手段50との検出情報に基づいて、機体が旋回走行を開始したのちに旋回終了位置に至ると予測される時点よりも起動用所要時間に相当する時間だけ前の時点における機体位置に至ると予測されるタイミングを求めて、そのタイミングにて電動モータM3を作動状態側に切り換える作動部操作手段53と、前記タイミングを補正する人為操作式のタイミング補正手段100とが備えられている。
(もっと読む)
粉粒体散布装置
【課題】圃場において所定の作業が行われた既作業領域に対して適切に粉粒体を拡散放出させることが可能となる粉粒体散布装置を提供する。
【解決手段】繰出し手段から繰り出される粉粒体を打撃により飛散させる回転式飛散手段27と、その回転式飛散手段27により飛散される粉粒体を圃場に拡散放出すべく案内する案内手段59,60とを備えて構成され、圃場において所定の作業が既に行われた既作業領域Zを検出する既作業領域検出手段と、既作業領域検出手段の検出情報に基づいて、回転式飛散手段27により飛散され且つ案内手段59,60により案内される粉粒体の圃場に対する散布領域を既作業領域Zに対応させるように変更する散布領域変更手段SHとを備えて構成されている。
(もっと読む)
水田作業機
【課題】走行機体の走行状態の変動にかかわらず、粉粒体散布装置により単位面積あたりに適切な供給量の粉粒体を散布供給することが可能な状態で、水田作業機が作業を実行しているときに粉粒体を散布することができる水田作業機を提供する。
【解決手段】走行機体の後部に備えられた粉粒体散布装置13が、貯留部24から供給経路26を通して供給される粉粒体を拡散散布する拡散手段27と、供給経路26を開閉自在なシャッター部材33と、そのシャッター部材33を切り換えるアクチュエータ34とを備えて構成され、アクチュエータ34の作動を制御する制御手段が、直進走行中において走行距離が設定距離に達する毎に、シャッター部材33を設定時間が経過する間だけ開状態に切り換え、且つ、旋回走行中であることが検出されている状態においては、シャッター部材33を閉状態に維持するようにアクチュエータ34の作動を制御する。
(もっと読む)
作業機
【課題】機体の旋回走行が終了して次回の作業行程にて作業走行するときに、作動部を時間遅れなく作動状態にすることが可能となる作業機を提供する。
【解決手段】アクチュエータM3の操作によって作動状態と非作動状態とに切り換え操作自在な作動部が備えられ、機体の旋回走行の開始に伴って旋回行程中における機体の位置を検出する機体位置検出手段51と、機体位置検出手段51の検出情報に基づいて、機体が旋回走行を開始したのちに旋回終了位置に至ると予測される時点よりも起動用所要時間に相当する時間だけ前の時点における機体位置にあるときに、アクチュエータM3を作動状態側に切り換える作動部操作手段53とを備える。
(もっと読む)
多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法
【課題】圃場に埋設された複数のセンサユニットの位置を設置後に収集可能な多地点測定データ取得装置および多地点測定システムおよび多地点測定データ取得方法を提供する。
【解決手段】1本の伝送路に固定された複数のセンサユニットそれぞれによって前記伝送路を介して返される応答から、前記各センサユニットが固定された位置から前記伝送路の一端までの伝送路長と前記各センサユニットの固定位置における前記伝送路の屈曲方向に関する情報とを含む情報を抽出する情報抽出部と、前記情報抽出部で抽出された情報に基づいて、前記複数のセンサユニットの配置を推定する配置推定部とを備える。
(もっと読む)
施肥装置
【課題】圃場の形状・寸法にかかわらず、効率性の高い走行経路の設定ができるとともに、走行経路の設定を行いながら連続的に施肥できるようにする。
【解決手段】第1設定点P1と第2設定点P2とを結ぶ基準線L0を設定する制御と、基準線L0と対向する平行な第2枕地走行経路L12を設定する制御と、第2枕地走行経路L12上に第3設定点P3を設定する制御と、第3設定点P3を設定することにより第2枕地走行経路L12の位置を設定する制御と、設定された第2枕地走行経路L12の位置に基づいて、第1枕地走行経路L11と第2枕地走行経路L12の間の距離を算出するとともに、第1枕地走行経路L11と第2枕地走行経路L12の間の施肥範囲B1中で施肥されてない範囲を算出し、枕地走行経路L1と内側走行経路L2を備えた走行経路Lを設定する。
(もっと読む)
防除作業機
【課題】圃場に散布される薬剤のばらつきを抑制すること。
【解決手段】圃場に薬剤を散布する防除作業機は、GPS衛星から送信される電波を受信するGPS受信部10と、GPS受信部10から得られる防除作業機の進行方向における位置情報と、前記薬剤の散布幅とに基づいて、防除作業機が旋回した後に圃場の薬剤を散布する領域へ進入する進入位置を求める制御用プロセッサ40を含む制御装置9と、進入位置を表示する表示部11Dと、を含む。
(もっと読む)
苗移植機
【課題】簡易な測定方法で精度良く一様施肥を実現することができる苗移植機を提供する。
【解決手段】圃場を走行する走行車体2と、この走行車体2に設けられ土壌に苗を植付ける苗植付部4と、この苗植付部4よりも走行車体2の前部に設けた施肥ガイド63から土壌に肥料を吐出する施肥装置5と、施肥ガイド63よりも走行車体2の前部に配置した左右の走行車輪10に設けられ土壌中に突入する左右一対の検出子71aと、これらの検出子71a間の通電抵抗または電気伝導度を検出して土壌の肥料濃度を検出する肥料濃度センサ71と、肥料濃度センサ71の検出データに基づいて施肥装置5の施肥量を変更する制御装置72と、土壌の温度を検出する温度センサ73とを備え、この温度センサ73の検出データに基づいて肥料濃度センサ71の検出データを補正する。
(もっと読む)
苗移植機
【課題】圃場の肥料残留状況に対応した一様な目標施肥濃度の肥料散布を実現することができる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行可能に支持されて圃場に苗株を植え付ける植付部(4)と、この植付部(4)の植付動作と対応してその直前位置で植付幅に及ぶ圃場面をロータ(11)の回転動作によって整地する整地装置(6)と、放出流量を調節可能に肥料を散布する施肥装置(5)とを備えて構成され、上記整地装置(6)のロータ(11)には、圃場の電気伝導率を検出する伝導率センサ(23)を設け、この伝導率センサ(23)の信号の換算によって得られる検出濃度に基づき、別途設定の目標施肥濃度に必要な散布密度によって施肥装置(5)の放出流量を制御する制御部を設けたものである。
(もっと読む)
走行作業機
【課題】クラッチを断操作した時に散布装置の繰出機構を停止するクラッチペダルスイッチを設けることで、クラッチ断操作により散布剤の繰出を停止させ、繰出機構の停止操作忘れをなくして、散布無駄を省くようにする。
【解決手段】走行系動力を断接するクラッチ2を備えた走行体3と、この走行体3に取り付けられ且つタンク4からの散布剤Hを繰出機構5のモータMを駆動して圃場Fに散布する散布装置6とを有している。走行体3には繰出機構5を起動又は停止するメインスイッチ7とクラッチ2を断操作した時に繰出機構5を停止するクラッチペダルスイッチ8とを設けている。
(もっと読む)
走行散布作業機
【課題】GPS信号に基づき走行散布作業機の位置情報を得て、隣接位置での重複した農作業を行なうことがないようにした走行散布作業機を提供すること。
【解決手段】GPSより得られる位置情報から機体の直進方位と、旋回開始位置から90度旋回して旋回戻し位置(e地点)に達した後、さらに90度旋回して直進する隣接作業方位を求め、肥料噴管からの粉粒体の散布幅を読込み、求めた直進方位と隣接作業方位から両方位間の移動距離d1を算出し、隣接作業方位から隣接作業方位と旋回戻し位置の移動距離d2を算出し、移動距離d1から隣接作業方位と前記旋回戻し位置の間隔を差し引いて前記間隔(移動距離d1−d2)を算出し、旋回開始位置と旋回戻し位置の間隔(移動距離d1−d2)を位置情報に変換して旋回戻し位置を求め、旋回を開始すると粉粒体散布装置を駆動停止させ、隣接作業位置(f地点)に達すると粉粒体肥料散布装置を駆動開始させる。
(もっと読む)
着果処理装置
【課題】作物の花房に対してのみ自動でホルモン剤を散布する着果処理装置を供すること。重複処理を防止し、同一花房に対し一回のみの散布処理を行う着果処理装置を供すること。
【解決手段】作物を撮影するカメラ3と、作物にホルモン剤を散布する散布部5と、カメラ3及び散布部5が取付けられた走行部15と、カメラ3、散布部5及び走行部15の動作を制御する制御用コンピュータ19とを有する着果処理装置1であって、制御用コンピュータ19は、カメラ3によって撮影された画像から作物の花の位置を特定する画像処理手段と、画像処理手段によって特定された花の位置をもとにして決定された場所に散布部5を移動させる移動処理手段と、ホルモン剤を散布した位置を記憶するデータテーブルとを有し、花の位置をもとにして決定された場所がデータテーブルにホルモン剤を散布した位置として記憶されているときは散布を実行しない。
(もっと読む)
散布作業機
【課題】走行車体1に、ホッパ18に収容された肥料或いは薬剤などの散布原料の散布量を調節できるようにした散布装置10を備え、車速の検出に基づいて散布量を自動制御する制御手段43を備えている散布作業機において、種々の肥料や薬剤の性状に関わらず、適正な散布量の散布を行えるようにする。
【解決手段】作業モードとテストモードに切換えるモード切換手段38を備え、このモード切換手段38をテストモードに切換えることにより、所定車速での散布量となるように散布量調節手段19を制御して所定時間の間、散布原料を吐出させ、この所定時間の間に吐出した吐出量を基に散布量を補正するように構成した。
(もっと読む)
ブロードキャスタ
【課題】 肥料散布作業のスピードアップが図れると共に、隣接する肥料散布行程で肥料の散布部分が重なったり、肥料が散布されない部分が生じたりするのを減少させる又はなくすことができるブロードキャスタを提供する。
【解決手段】 トラクタ5の後部に装着されて圃場を往復移動しながら該圃場に肥料を散布するブロードキャスタにおいて、マーカー剤を貯留するマーカー剤タンク6と、次の肥料散布行程での肥料散布作業におけるトラクタ5の走行の指標となるように前記マーカー剤によって圃場に目印Cを付けるべく、前記マーカー剤タンク6内のマーカー剤を次の肥料散布行程での未肥料散布部分25に供給するマーカー剤供給手段18とを設ける。
(もっと読む)
移植機
【課題】適切なタイミングで均一に薬剤を散布することによって、効率良くかつ経済的な薬剤散布装置を備えた移植機を提供する。
【解決手段】薬剤散布装置40は、苗供給装置の固定コンベア31前部に配設されている。薬剤散布装置40と略々同じ位置において、固定コンベア31のコンベアフレーム31a,31aには回転センサ60と、回転センサ60に苗箱を押し付けて当接させる押接板61とが対向して取付けられている。苗箱に載置された予備苗が苗供給装置の転動ローラ34上を搬送され、押接板61によって苗箱と回転センサ60とが当接すると、予備苗の位置及び搬送速度が検出される。回転センサ60によって予備苗の位置及び搬送速度が検出されると、予備苗が薬剤散布装置40の下部に位置しているときのみ、その搬送速度に合わせて薬剤が散布される。
(もっと読む)
移植機
【課題】苗に均一且つ確実に施薬することが可能で、構造が簡略化され、植付作業前に苗の施薬状況を確認することができる移植機を提供する。
【解決手段】走行機体3の前方から植付作業機6に予備苗Yを搬送供給する搬送装置7と、前記搬送装置7の搬送経路における予備苗Yの位置を検出する位置検出手段A,B,C,Dと、前記搬送経路の待機位置P1に予備苗Yを待機させる待機手段36とを設け、前記搬送経路における前記待機位置P1の下流側に施薬作業を行う作業位置P2が形成されるように施薬装置27を配置し、制御部48が位置検出手段A,B,C,Dによる位置検出に基づいて施薬制御を行うとともに、施薬装置27による予備苗Yの施薬作業中は予備苗Yを待機位置P1に待機させ、施薬装置27による施薬作業が完了して予備苗Yが前記作業位置P2の下流側に搬送可能な状態になると待機位置P1にある次の予備苗Yを前記作業位置P2に供給する。
(もっと読む)
農用トラクタ
【課題】インプルメント制御用信号によりPTO動力の出力状態をインプルメント側で認識できるように構成して、散布装置に貯留された薬剤や肥料が不要にこぼれ落ちることを防止する。
【解決手段】主制御装置16に、インプルメント制御用信号Eを出力する出力手段と、インプルメント制御用信号Eを補正する出力補正手段とを備え、出力補正手段により補正されたインプルメント制御用信号Eに基づいて、PTOが切り状態であると判別されると、制御装置22がシャッタ又はバルブ21を閉じ制御するように構成してある。
(もっと読む)
作業車両
【課題】圃場等において土壌中のアンモニア態窒素含有量の測定結果より該アンモニア態窒素の残存日数(硝酸態窒素に変化する日数)を予測演算し、前記測定結果と演算結果に基づいて、欠乏する土壌成分を分析し、該欠乏する成分を有する肥料を施肥することが課題である。
【解決手段】土壌に赤外線を照射して、集められた拡散反射光をスペクトル分析して、土壌中の有効元素成分量を測定する拡散反射測定装置22を搭載する作業車両100であって、圃場の単位面積あたりにおける、窒素系肥料施肥量に対応した経時的アンモニア態窒素の減度合いに関するデータベース10を有し、該データベース10とアンモニア態窒素成分の測定結果に基づいて、圃場に欠乏する土壌成分を各測定部位ごとに算出し、表示する。
(もっと読む)
土壌分析システム
【課題】本発明においては、圃場等において土壌中のアンモニア態窒素含有量の測定結果より該アンモニア態窒素の残存日数(硝酸態窒素に変化する日数)を予測演算し、次期施肥計画を出力する土壌分析システムの提供が課題である。
【解決手段】土壌中のアンモニア態窒素濃度を測定する土壌分析システム1であって、該土壌分析システム1にはデータベース10と演算処理部(処理手段3)と入力手段2と表示手段4を有し、該データベース10には、単位面積あたりの窒素系肥料施肥量に対応した経時的アンモニア態窒素の減少度合い情報が蓄積され、アンモニア態窒素濃度の測定値と、窒素系肥料の施肥量と、施肥日時を元に、前記処理手段3によって、次回の窒素系肥料の施肥量と時期を演算処理して出力する。
(もっと読む)
1 - 20 / 25
[ Back to top ]