
Fターム[2B076EB05]の内容
収穫機本体(機枠、駆動) (12,770) | 制御の目的、効果 (336) | 安全性の向上、危険の防止 (163)
Fターム[2B076EB05]に分類される特許
61 - 80 / 163
コンバイン
【課題】刈取部の各駆動部を個別に駆動することができるコンバインを提供する。
【解決手段】
刈取部の各駆動部は、それぞれ駆動軸に電動モータをそれぞれ配設しているので、各駆動部を電動モータにより個別に駆動することができ、部品数を少なくして駆動系を簡単化することができる。また、電動モータから直に各駆動部に動力を伝達しているので、動力の伝達効率が向上する。さらに、各駆動部を個別に駆動することができるので、各駆動部に個別にメンテナンスしたい場合などの作業性が向上する。
(もっと読む)
コンバイン

【課題】コンバインの走行駆動経路にブレーキを設けた構成で、枕扱ぎ作業時に使用する刈取掻き込み操作具の入り操作時にエンジンの駆動力が走行装置へ伝わらず、動力伝動機構やブレーキに制動に伴う過負荷が加わらないようにして、耐久性を高める。
【解決手段】エンジンの駆動力を変速して刈取装置(9)と走行装置(3)に伝動する静油圧式無段変速装置(18)と、該静油圧式無段変速装置(18)の出力回転速度を変速操作する主変速レバー(23)と、前記走行装置(3)のブレーキ(68)を作動させる刈取掻き込み操作具(5)と、該刈取掻き込み操作具(5)によるブレーキ(68)の入り操作および切り操作を前記主変速レバー(23)が変速中立位置でのみ操作可能に牽制する牽制機構(97)を設ける。
(もっと読む)
コンバイン
【課題】走行機体の後方に存在する障害物を検出して、操縦者や周辺作業者に知らしめるバックソナー等の後方監視手段を備えたコンバインにおいて、圃場の畦際で後進する際や車庫入れのために後進する際、走行機体の後部と、その後方に存在する障害物が接触する直前まで後進操作を行わなければならない場合があり、この後進操作を操縦者が安全且つ確実に行えるようにする。
【解決手段】走行機体2に接近する障害物と走行機体2の距離に応じて、走行機体2の後進操作を操縦者や周辺作業者に知らしめる後進警報用ホーン16の警報出力周期を変化せしめるように構成した。
(もっと読む)
コンバイン
【課題】圃場に植立した未刈り穀稈の性状等に関連して穀稈引起装置223の作動速度が変更されても、刈取り穀稈の穂先側が株元よりも若干先行した脱穀姿勢になるように刈取り穀稈を搬送でき、穀稈搬送手段34の搬送性能を向上できるようにしたコンバインを提供するものである。
【解決手段】エンジン14によって作動する走行部2を備えた走行機体1と、圃場に植立した穀稈を取込む穀稈引起装置223と、圃場に植立した穀稈の株元を切断する刈刃装置222と、前記刈刃装置222によって株元が切断された前記穀稈を挟持搬送する穀稈搬送手段34とを備えてなるコンバインにおいて、前記穀稈搬送手段34を作動する縦搬送駆動用電動モータ92と、前記穀稈引起装置223の作動速度を検出する引起し速度センサ291とを設け、前記引起し速度センサ291の検出結果に基づき、縦搬送駆動用電動モータ92の回転速度を変更制御するように構成したものである。
(もっと読む)
コンバイン
【課題】畦際で停車したままこの畦際の植立穀稈を刈り取った後、走行状態に復帰する際に、急発進による畦への衝突を少なくする。
【解決手段】コンバインの操作部(10)に機体(2)を前進させずに刈取装置(6)の駆動を可能とする掻込用ペダル(9)を設け、操作部(10)に設けた主変速レバー(11)の操作によって回転する非円形状のカム軸(13)を掻込用ペダル(9)の基部に設けたガイド溝(14)に挿し込み、主変速レバー(11)を中立位置に操作しないと掻込用ペダル(9)が踏込位置から初期位置へ復帰しない構成とした。
(もっと読む)
コンバイン
【課題】刈取作業中の塵埃の飛散、作業環境の悪化。
【解決手段】コンバインは、左右側壁6と底板9と後板10を備えたオーガーフレーム11と、リール12と刈刃13とオーガー8を備えた刈取部5とを有する。リール12を外したオーガーフレーム11には、左右一対の分草体36の後方に引起搬送装置37および刈刃41を設けたユニット38を左右方向に複数並設したロークロップユニット35を着脱自在に取付け、前記リール12を外したリール取付アーム25には前記ロークロップユニット35の上方を覆う透明シート部材45を着脱自在に装着可能な構成とする。
(もっと読む)
コンバインの安全装置
【課題】コンバインと補助作業者の位置を平面的な地図上に表示することでコンバインと補助作業者の距離を認識し易くして作業の安全性を向上させる。
【解決手段】コンバイン11に備えたGPS受信装置2の地図情報で自機11の位置をディプレイ10の平面地図上に表示すると共に、コンバイン11の周辺の補助作業者16を感知してその補助作業者16までの距離を計測する計測手段Aからの情報で前記ディスプレイ10の平面地図上に補助作業者16を重ねて表示し、コンバイン11と補助作業者16が所定距離に接近すると警報すべくしてコンバインの安全装置を構成した。
(もっと読む)
コンバイン
【課題】前進走行中にクローラ走行装置が溝や穴に落ち込む前に警報を出して走行を停止することで機体の転倒を防止する。
【解決手段】第1に、左右のクローラ走行装置(4,5)の前方位置で刈取装置(1)の下部に地面に向けて距離を測定する距離測定センサ(2,3)を設け、該距離測定センサ(2,3)が検出する測定距離が設定値から外れた場合にクローラ走行装置(4,5)の駆動を停止する構成とした。第2に、左右の距離測定センサ(2,3)を刈取装置(1)の下部で左右のクローラ走行装置(4,5)のそれぞれ前方位置に設け、左右両方の距離測定センサ(2,3)が検出する測定距離の差が所定値(B)以上になるとクローラ走行装置(4,5)の駆動を停止する構成とした。
(もっと読む)
刈取収穫機
【課題】 走行機体の水平基準面に対する前後傾斜角を設定傾斜角に維持しながら刈取作業を行うことが可能なものでありながら、刈取部が地面に突っ込むおそれを少なくすることが可能な刈取収穫機を提供する。
【解決手段】 刈取部10の対地高さが制御目標高さになるように刈取シリンダC1の作動を制御する刈取昇降制御並びに走行機体Vの水平基準面に対する前後傾斜角が設定傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段が、刈取部10が地面に近付く形態で走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させているときは、目標対地高さ設定手段にて設定される目標対地高さに対応させて定めた基準対地高さよりも前傾斜操作用設定量だけ高い値を制御目標高さとして定め、走行機体Vの前後傾斜角を前下がり傾斜方向に姿勢変更させていないときは基準対地高さを制御目標高さとして定める。
(もっと読む)
コンバイン
【課題】手扱作業部近傍で機体を左下がり傾斜させることで、手扱作業の能率を向上する。
【解決手段】機体に対して左右のクローラ走行装置(5,5)を独立して昇降するクローラ昇降装置(31,32)と、機体の左右傾斜角度を検出する傾斜角度検出手段(44)の検出または運転操作部(4)に設けた手動傾斜操作手段(48)の検出に基づき、クローラ昇降装置(31,32)を昇降制御して機体の左右傾斜または車高を制御する傾斜制御手段(41)を備え、脱穀部(3)に手扱作業部(11)を備えたコンバインにおいて、前記手扱作業部(11)の近傍に左傾斜操作手段(15)を設け、左傾斜操作手段(15)を操作すると機体が左下がり傾斜姿勢となるように、左傾斜操作手段(15)と前記傾斜制御手段(41)とを連係させると共に、機体が左下がり傾斜姿勢となる時に前処理部(2)の下部が地面に突っ込むのを防止する突っ込み防止手段を設けた。
(もっと読む)
農作業機
【課題】農作業機において、各作動部の機能調整作業を安全に行えるようにする。
【解決手段】農作業機における各種モードの情報を表示するための液晶ディスプレイ75と、前記情報を液晶ディスプレイ75に表示させる制御を実行するコントローラ130と、エンジンから各作動部に向かう動力伝達を継断操作するためのクラッチレバーとを備える。コントローラ130は、クラッチレバーを切り操作した場合には、実行中の他のモードから、各作動部の機能調整を行う調整モードに移行し、液晶ディスプレイ75に調整モードの情報を表示させる。調整モードの実行中にクラッチレバーを入り操作した場合には、調整モードから移行前の元のモードに復帰し、液晶ディスプレイ75の画面表示を、調整モードの情報から元のモードの情報に遷移させる。
(もっと読む)
コンバイン
【課題】前照灯12と作業灯13とが点灯している状態で機体の走行状態を検出した場合に、作業灯13を点滅させて作業灯13が点灯したまま路上走行を行わないように、運転作業者に注意を促す。
【解決手段】穀稈を刈取る刈取装置(4)と、刈取り穀稈の供給を受けて脱穀する脱穀装置(5)と、該刈取装置(4)と脱穀装置(5)を始動及び停止操作する刈脱クラッチレバー(11)と、穀粒貯留タンク(7)へ貯留した穀粒の機外への排出を始動及び停止操作する排出クラッチレバー(10)と、該脱穀装置(5)部に備えた前照灯(12)及び作業灯(13)と、前記前照灯(12)と作業灯(13)とが点灯している状態で機体の走行状態を検出した場合に、前記作業灯(13)を点滅させる制御装置(9)を設ける。
(もっと読む)
コンバイン
【課題】少ない排藁量であっても引継ぎ不良による不具合を防止し、多量の排藁が搬送された場合でも詰まりの発生を未然に防止する。
【解決手段】クローラ(1)を備えた車体(2)の前部に刈取部(3)を設け、該車体(2)の後部に脱穀部(4)を設け、該脱穀部(4)の扱室(8)の後方に脱穀後の排藁を挟持搬送する排藁搬送装置(14)を設け、該排藁搬送装置(14)を、チェンレール(15)に沿って券回する排藁搬送チェン(16)と該排藁搬送チェン(16)の下側に対設する挟持杆(17)とから構成し、前記チェンレール(15)の中間部位に設けたチェン駆動用スプロケット(27)の軸芯(P)を支点としてチェンレール(15)の始端側が上下揺動する構成とし、該チェンレール(15)の始端側を挟持杆(17)側に付勢するスプリング(31)を設ける。
(もっと読む)
コンバイン
【課題】コンバインにおいて、前処理部17駆動用の作業機HST16の異常停止等に起因して油圧が必要以上に増大することが防止する。
【解決手段】前処理部駆動用の作業機HST16の油圧経路で、圧油を油圧モータ16Mを迂回して油圧ポンプ16P側に戻す正転迂回経路に、油圧が正転迂回経路通過圧力を越えると通過を許容する正転規制バルブ72を設け、一方油圧ポンプ16Pから油圧モータ16M側への油圧経路に油圧を検知する油圧センサ73を設け、油圧センサ73からの情報によりエンジン1を停止させるエンジン停止手段を設け、エンジン停止圧力を正転迂回経路通過圧力より小さく設定した。
(もっと読む)
コンバイン
【課題】ノッタ装置による結束作業時は、ノッタ能力限界警報を行うことにより、ノッタ装置の過負荷を事前に防ぎ、安全機構におけるシャーピンの破断を回避し、また、過負荷の惧れがないバラ落し作業時には、不要な警報による作業性の低下を回避する。
【解決手段】排藁搬送経路の終端部にノッタ装置10を備え、該ノッタ装置10に供給される排藁を結束して放出する結束作業と、ノッタ装置10に供給される排藁を結束せずに放出するバラ落し作業とを選択可能なコンバイン1において、排藁搬送経路から供給される排藁の量がノッタ装置10の結束処理能力を超える可能性がある場合に警報を行うと共に、ノッタ装置10がバラ落し作業状態であると判断したとき、ノッタ能力限界警報を解除する。
(もっと読む)
乗用型作業車両及びその例としての稲用のコンバイン
【課題】畦超えやトラックへの載せ降ろしを楽に行えるコンバインを提供する。
【手段】操縦席14かその近傍部で機体の側方に立ったオペレータの手が届く部分に、走行機体1の前後進と停止の操作を行う歩行操作用走行レバー43が設けられている。歩行操作用走行レバー43の設置場所の一例としては、操縦ハンドル25の側面部が挙げられる。歩行操作用走行レバー43は電気的手段で直進機構に介入しており、歩行操作用走行レバー43の回動操作によって走行機体1を前後進及び停止させることができる。
(もっと読む)
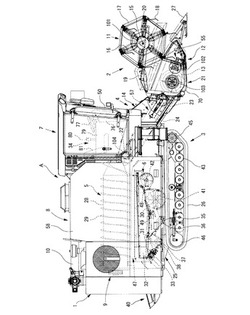
コンバイン
【課題】走行機体の傾動制御を穀粒排出作業に協調させて行う際に、走行機体を安定させた状態で穀粒排出作業を行うことができるコンバインを提供することを課題とする。
【解決手段】排出オーガ11を支持する走行機体2と、走行部4L,4Rと、傾斜変更可能に走行機体2を傾動させるアクチュエータ7L,7Rと、水平方向に対して走行機体2の傾斜角を検出する傾斜角検出手段49と、制御部32とを備え、上記制御部32が水平方向に対して走行機体2の傾斜角を所定の角度に維持する傾斜自動制御を行うコンバインにおいて、制御部32が傾斜自動制御中に条件を満たさなくなった場合には走行機体2を走行部4L,4Rに対して略平行状態に復帰させる平行復帰制御を行い、条件を満たしている場合でも、水平回動位置が収納位置であることが検出されている排出オーガ11への上昇指令に起因して傾斜自動制御を停止するとともに平行復帰制御を行う。
(もっと読む)
刈取収穫機の作業用スイッチ取付構造
【課題】 スイッチの取付作業を容易迅速に行い得る刈取収穫機の作業用スイッチの取付構造を提供する。
【解決手段】 脱穀装置を覆う脱穀カバー体18を設けるとともに、エンジン緊急停止スイッチ17のスイッチ本体17Aを脱穀カバー体18と脱穀装置との間に位置させる。脱穀カバー体18に形成した開口18aを通してスイッチ本体17Aのナット装着部17bを脱穀カバー体18の外面側に突出させる。取り付け固定用のナット19とスイッチ本体17Aとで脱穀カバー体18を挾持する状態で、スイッチ本体17Aを脱穀カバー体18に取り付け固定する。
(もっと読む)
コンバイン
【課題】刈取部を駆動したままで高速走行して刈取部が過回転して破損するような事態を招きにくくする。
【解決手段】第1の手段として、刈取部への動力伝達を断続する刈取クラッチの接続状態を検出する刈取クラッチセンサ37を設け、刈取クラッチセンサ37によって刈取クラッチの接続状態が検出された場合に、走行変速操作具の高速側への操作を規制するか若しくは走行変速操作具を高速側へ操作してもこの走行変速操作具の操作を無効とする制御手段を設ける。第2の手段として、刈取部への動力伝達を断続する刈取クラッチの接続状態を検出する刈取クラッチセンサ37を設け、刈取クラッチセンサ37によって刈取クラッチの接続状態が検出され、且つ走行変速操作具が高速側へ操作された場合に刈取クラッチを強制的に遮断する制御手段を設ける。
(もっと読む)
芝刈機
【課題】芝刈り機構と、芝刈り機構にて刈り取った刈草を受け入れる集草ボックス18と、集草ボックス18を持ち上げるためのリフト機構19とを備えている芝刈機において、芝刈り機構の駆動中に集草ボックス18を誤って上昇させたり、集草ボックス18が上げ位置にあるときに芝刈り機構を駆動させたりして、刈草等を撒き散らすおそれを解消する。
【解決手段】リフト機構19に、集草ボックス18の昇降動に連動して突出姿勢と収納姿勢とに姿勢変更動可能なアウトリガー45を取り付ける。更に、PTO操作レバー52の入り切り操作状態を検出するためのPTO入りセンサ151と、アウトリガー45の姿勢を検出するためのアウトリガーセンサ155とを備える。アウトリガーが地面に向けて突出した突出姿勢であり且つPTO操作レバー52が入り状態であれば、エンジン停止機構としてのエンジン停止ソレノイド152が作動するように構成する。
(もっと読む)
61 - 80 / 163
[ Back to top ]