
Fターム[2B304KA08]の内容
Fターム[2B304KA08]の下位に属するFターム
Fターム[2B304KA08]に分類される特許
1 - 20 / 220
作業機
苗移植機
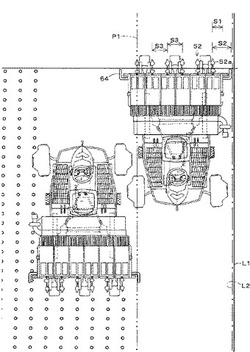
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
農作業機

【課題】一気にプラウ12などの作業機が降下することを防いだ作業機を装着した農作業機を提供すること。
【解決手段】作業機昇降スイッチ23を下げ側に押し続けると、リフトシリンダ17の作動油が最大流量でリフトアーム19を下げ側に出力する自動すき込み制御機能を備え、車速センサ24により検知される所定の車速以上の車速が検出されない場合は、前記自動すき込み制御を禁止する制御構成を有する制御装置50を備えたトラクタであるので、作業機着脱時などを含めて前記自動すき込み制御が不要な場合に、この制御機能を働かせないので、誤操作しても急にリフトアーム19が下降して作業機やアスファルトを壊してしまうなどの恐れがなくなる。
(もっと読む)
水平制御装置
【課題】オペレータが移動させたい方向とは反対方向に制御対象部材の傾きが変更されるという不都合を確実に防止する。
【解決手段】水平制御装置において、制御装置は、傾き設定部材が操作されると、当該傾き設定部材の操作方向を把握すると共に、傾きセンサによって検出された前記傾き設定部材の操作前の状態における制御対象部材の実際の傾きと前記傾き設定部材の操作後の状態に応じて設定される目標傾きを基準とした縮小幅の不感帯との相対位置関係に基づいてアクチュエータによって前記制御対象部材が傾けられるべき傾斜方向を把握して、前記操作方向及び前記傾斜方向が同じか否かを判定し、前記操作方向及び前記傾斜方向が同じ場合には前記傾き設定部材の操作時に行う不感帯幅の縮小幅への変更を許容し、前記操作方向及び前記傾斜方向が異なる場合には前記傾き設定部材の操作時に行うべき不感帯幅の縮小幅への変更を禁止して不感帯幅を標準幅に維持する。
(もっと読む)
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
作業機
【課題】 本発明の課題は、整地装置の干渉を防止することである。
【解決手段】 走行車体(1)の後側に昇降リンク装置(3)を介して縦リンクを昇降可能に設け、縦リンクに上下動機構を介して整地装置(8)を収納位置へ上動可能に支持させ、縦リンクに着脱される着脱ヒッチを介して作業部(4)を装着し、作業部装着状態で着脱ヒッチが外れないようロックするロック装置を設け、作業部(4)と整地装置(8)を共に左右ローリングさせるローリング軸を設け、作業部(4)の上昇時には上下動機構の作動により整地装置(8)を収納位置へ上動させる構成とした作業機とした。
また、機体の旋回時には上下動機構の作動により整地装置(8)を収納位置へ上動させる構成とした作業機とした。
(もっと読む)
作業機の作動システム
【課題】第三者による作業機の作動を確実に防止することができる作業機の作動システムを提供する。
【解決手段】管理サーバ3は、ユーザ登録の完了後に携帯用IDコードを携帯端末4に送信するIDコード送信手段51を備え、携帯端末4は、IDコード送信手段51から送信された携帯用IDコードを保存するデータ記憶手段7と、データ記憶手段7に記憶された携帯用IDコードを作業機2に送信するデータ送信手段8とを備え、制御装置5は、携帯端末4から送信された携帯用IDコードと予め保存された作動用IDコードとの照合を行うIDコード照合手段と、照合手段によってIDコードの照合が成立したときに制御装置5による通常制御を許可すると共に照合が不成立のときに通常制御を許可しない制御制限手段とを備えている。
(もっと読む)
作業機及び作業システム
【課題】、高価な機器を利用せずに、圃場表面を一定の深さで削る。
【解決手段】圃場作業システムは、トラクタに接続され、駆動機構により接続部分の高さ位置が変更可能とされたフレーム12と、フレームの一部を圃場200から所定高さの位置で支持する尾輪14と、圃場表面の土壌を削り、運搬する排土板16と、フレームに対する排土板の高さ方向の位置を変更する位置変更機構18と、フレームの水平面に対する角度を検出する角度検出部30と、圃場の未削部分の表面に対するフレームの高さを検出する高さ検出部34と、フレームに対する排土板の高さ方向の位置関係を検出する位置関係検出部32と、角度検出部の検出結果に基づいてフレームの角度を水平に維持するように駆動機構を制御し、当該制御状態での高さ検出部と位置関係検出部の検出結果に基づいて、位置変更機構を制御する制御部と、を備える。
(もっと読む)
移植機
【課題】走行機体の後進切換に連動して、弾性部材の付勢力により操作体を介して作動体を植付作業機が自動的に上昇駆動する側に回動作動させる移植機において、前記弾性部材を操作体が効率良く回転作動されるように配置するとともに、スムーズに植付作業機が上昇する側に作動体を回動させることができる移植機を提供することを課題としている。
【解決手段】植付作業機6を昇降作動させるように回動可能に支持された作動体31と、操作体39を介して植付作業機6が上昇する側に作動体31を付勢する弾性部材41とを備え、走行機体3の後進切換に連動して植付作業機6を自動的に上昇駆動させることができる移植機において、操作体39がロック位置に回動された際、弾性変形した状態で、操作体39の回動支点を挟んで対向する一対のスプリング41A,41Bによって前記弾性部材41を構成した。
(もっと読む)
苗移植機
【課題】
畦越走行時等に後側の苗植装置が上昇位置にあると、重心位置が高く、車体の前端部が上昇して、畦越走行姿勢が不安定となる。
【解決手段】
乗用走行車体5の後側に、リフトシリンダ6によって昇降のリフトリンク7を介して苗植装置8を連結し、前記リフトシリンダ6によって苗植装置8を下降させて底部のフロート9を接地滑走させながら均平土壌面に植付装置10により苗タンク11から繰出される苗を分離挿植すると共に、車体5の前端部にはこの車体5操作作用のグリップハンドル12を設けた苗植機において、前記グリップハンドル12を倒し操作することによって、苗植装置8を適宜位置まで下降させる構成とする。
(もっと読む)
作業車両
【課題】本発明は、路上走行と耕耘作業のモード切替手段を設けることによって路上走行速のままで耕耘作業に入るような事態を回避し、問題解決を図らんとするものである。
【解決手段】メータパネル(8)の適所にスイッチON・OFFにより耕耘作業モードと路上走行モードとに切り替えできるモード切替スイッチ(22)を設け、前記耕耘作業モードの詳細設定をする各種設定器(29)は、前記メータパネル(8)部周辺若しくは運転操作部(9)近くに設置してあることを特徴とする作業車両とする。また、前記各種設定器(29)は、耕深設定器(24)、傾斜設定器(26)、ブレーキ調整設定器(28)等からなり、タッチパネル画面で調整が行えるように構成してあることを特徴とする作業車両とする。
(もっと読む)
苗移植機
【課題】旋回後に苗の植付開始位置を適切な位置に揃えることができる苗移植機を提供すること。
【解決手段】苗移植機に、旋回時又は後進時には植付部52を自動的に上昇させ、前進時には植付部52を下降させる自動昇降機構Aと、植付部52の昇降動作及び苗植付動作の入切動作を行う植付昇降レバー33と、植付部52を上昇させた状態で後進させると後輪回転センサ182により検知される後進時の回転数が予め設定された基準回転数を上回ると自動昇降機構Aを作動させない制御構成とする制御装置200を設けたので、旋回後に植付部52を下降させて苗の植え付けを再開する際に、作業者は植付昇降レバー33を手動操作して植付部52を下降させることができるので、旋回後の苗の植付開始位置を適切な位置に揃えられ、苗の植付精度が従来より向上する。
(もっと読む)
ロータリ耕耘機
【課題】 構成部材が少なく構造が簡単で製造費が安上がりになり、しかも支持フレームの高さ設定を容易にすることができるロータリ耕耘機を提供する。
【解決手段】 支持フレーム9には、左右一対の揺動アーム81と、接地部材7,8を支持するツールバー83とが備えられ、一方の揺動アーム81に支持フレーム9の揺動高さを示す目盛り96が前後方向に設けられ、枢支軸84の上方位置の機枠4に連動杆98の前上側が左右方向の支軸99廻りに上下揺動自在に支持され、連動杆98の後下側には、左右方向に屈曲されかつ前記一方の揺動アーム81に上側から接当される接当部101が形成され、かつ接当部101自体に又はその近辺に目盛り96と対向する指標部101aが形成され、前記指標部101aが揺動アーム81の上下揺動に連動して前記目盛り96に沿って前後に移動自在とされている。
(もっと読む)
作業車両
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
作業車の供給物補給構造
【課題】作業装置の供給物補給高さ位置への無理な下降操作で作業装置が損傷するなどの不都合の発生を阻止する。
【解決手段】走行車体の後部に供給物を圃場に供給する作業装置を昇降可能に装備し、作業装置への供給物の補給を要する状態を検知した場合に、作業装置を作業高さ位置から予め設定した供給物補給高さ位置まで自動昇降させる補給用昇降制御を実行する制御手段を備えた作業車の供給物補給構造において、作業装置の接地を検知し、かつ、作業装置の高さ位置が供給物補給高さ位置よりも高いことを検知した状態で、作業装置への供給物の補給を要する状態を検知した場合には、制御手段が補給用昇降制御を実行しないように構成してある。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
田植機
【課題】苗継ぎ作業時に、エンジンの回転数をアイドル回転数よりも低下させた場合でも、植付部を設定角度に維持することができる田植機を提供する。
【解決手段】エンジン14が搭載された走行部10の後方に植付部40を左右傾斜可能に装着した田植機1において、制御装置100は、苗継ぎ位置検出スイッチ23aのON信号を検出すると、エンジン14の回転数がアイドル回転数より低い設定回転数となるように第一アクチュエータ71を制御して、かつ、角速度センサ61の検出値Bを静止状態の検出値Bで置き換えて前記第二アクチュエータ72を制御する。
(もっと読む)
リモコン操作装置
【課題】煩わしい操作をすることなく、複数種類の農作業機に対して共通に使用できるリモコン操作装置を提供する。
【解決手段】リモコン操作装置1は、複数種類の農業機械に対して共通に使用可能なものであり、複数種類の農業機械の各操作が可能な操作スイッチ11を表示する操作表示部10を有する。操作表示部10は、これを見る角度に応じて複数種類の農作業機のいずれかに対応する操作スイッチ11を表示する。操作表示部10は、複数種類の農作業機の各操作に使用される操作スイッチの画像が描かれたスイッチ画像シートと、スイッチ画像シートの画像上に配置された複数のレンチキュラーレンズとを有してなる。
(もっと読む)
代かき作業機の耕深表示装置
【課題】代かき作業時に耕深を一定にすることができる耕深表示装置を提供する。
【解決手段】耕深表示装置40は、機体5に回転自在に支持された耕耘ロータ13の上部を覆うシールドカバー13と、この後部に上下方向に回動自在に配設されて耕耘ロータ13により耕耘された耕土を整地する第1整地板11と、この後部に上下方向に回動自在に配設されて耕土表面を均平にする第2整地板12とを備える代かき作業機1に設けられる。耕深表示装置40は、一端側が機体5に回動自在に接続されて他端側が第2整地板12に回動自在に接続され、耕耘ロータ13により耕耘された耕土の耕深に応じた第1整地板11に対する第2整地板12の回動に伴って上下方向に回動自在な揺動アーム42と、揺動アーム42の回動に応じて耕深を表示する耕深表示部50とを有してなる。
(もっと読む)
作業車両
【課題】本発明の課題は、前後進レバーによる面倒な前後進切替操作をなくし、単純なスイッチ操作のみで前後進の切り替えが行え、作業位置の位置合わせが容易に行える装置を具現することにある。
【解決手段】本発明は、走行車体(1)の後部に装着した作業機(10)を昇降可能に設け、この作業機(10)を昇降操作する昇降レバー(12)のグリップ部(12a)に押し込み操作時にのみ作動可能なスイッチ(13)を設け、該スイッチ(13)は現在の機体の進行方向を変更するように構成してあることを特徴とする作業車両とする。また、スイッチ(13)のスイッチ押し込み時は、車速を予め設定されたコントローラ設定値まで下げる構成とする。また、スイッチ(13)の押し込み操作時には、後進時における車速を段階的に下げる構成とする。
(もっと読む)
1 - 20 / 220
[ Back to top ]