
Fターム[2B304MC06]の内容
Fターム[2B304MC06]に分類される特許
1 - 20 / 56
作業車両
【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
作業機及び作業システム

【課題】、高価な機器を利用せずに、圃場表面を一定の深さで削る。
【解決手段】圃場作業システムは、トラクタに接続され、駆動機構により接続部分の高さ位置が変更可能とされたフレーム12と、フレームの一部を圃場200から所定高さの位置で支持する尾輪14と、圃場表面の土壌を削り、運搬する排土板16と、フレームに対する排土板の高さ方向の位置を変更する位置変更機構18と、フレームの水平面に対する角度を検出する角度検出部30と、圃場の未削部分の表面に対するフレームの高さを検出する高さ検出部34と、フレームに対する排土板の高さ方向の位置関係を検出する位置関係検出部32と、角度検出部の検出結果に基づいてフレームの角度を水平に維持するように駆動機構を制御し、当該制御状態での高さ検出部と位置関係検出部の検出結果に基づいて、位置変更機構を制御する制御部と、を備える。
(もっと読む)
苗移植機
【課題】旋回操作連動で植付部を昇降制御する場合に、下降時の植付部の保護と圃場面の検出精度を損なうことなく、速やかに植付を再開できる苗移植機を提供する。
【解決手段】苗移植機は、圃場走行用の走行部(2,3)と、苗移植の作業高さを検出する圃場面センサ(6s)を備えて昇降リンク(5)により昇降可能な植付部(6)と、この植付部(6)を左右水平に角度調節するローリング機構(7)と、の旋回開始で植付部(6)を上昇保持し、旋回終了で作業高さに戻す旋回連動昇降機構とを設けて構成され、上記植付部(6)の高さ位置を検出する位置検知装置(5s)を設け、この位置検知装置(5s)により、旋回開始時の植付部(6)の作業高さを記憶するとともに、旋回終了時の植付部(6)の下降の際に、記憶による作業高さ位置から上方に所定距離の高さ位置を境にその上下で下降速度を切替え制御可能に上記旋回連動昇降機構を構成したものである。
(もっと読む)
苗移植機
【課題】レバー式植付操作機構に旋回連動機構を備える苗移植機において、植付昇降レバーの誤操作によることなく、植付部の安定動作を確保することができる苗移植機を提供する。
【解決手段】苗移植機は、走行車体を旋回操作する操舵部材(4)と、走行車体に昇降可能に支持した植付部(6)と、この植付部(6)の上昇、中立、下降、植付の順に切替え動作させる植付昇降レバー(8)と、上記操舵部材(4)による旋回の開始及び終了と連動して植付昇降レバー(8)を上昇と下降の位置に移動させる自動昇降機構(C)とを備えて構成され、上記植付部(6)の植付作業を検知する作業検知部材を設け、検知した作業が所定の継続範囲に該当しない場合に自動昇降機構(C)の作動を停止するものである。
(もっと読む)
作業車両
【課題】エンジンの出力特性に合致するようエンジン回転数やHST開度を自動調節する機構を備えた作業車両を提供すること。
【解決手段】エンジン回転数の上昇だけで予め設定されているエンジン回転数とエンジントルクの関係を示す適切な出力特性となるトルクが得られない場合にHSTサーボアクチュエータ30を作動させて油圧式無段変速装置(HST)の開度を下げて、適切な出力特性となるトルクを得て、その後再びHSTサーボアクチュエータ30を作動させてHST23の開度を設定した開度に戻す制御構成を有する制御装置100を設けた作業車両であり、エンジントルクと回転数が予め設定された適切なトルク対回転数の出力特性と比較し、エンジン回転数を前記出力特性に合致する値に変更する制御構成としたことにより、自動的に燃費が良い状態に維持されるので、燃費が従来より向上する。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
トラクタの作業機制御装置
【課題】ドラフトアップ機能を有効に使うことのできるトラクタの作業機制御装置を提供する。
【解決手段】ドラフト用スプール作動レバーを一端側を支点として揺動させて接当部に対する押動部材の位置を調整することで作業機を上昇させるべき牽引負荷を設定可能とし、設定以上の牽引負荷によりドラフトフィードバックロッドが押動されて、ドラフト用スプール作動レバーが他端側を支点として揺動し且つ押動部材が接当部を押動して作業機を上昇させるべくスプールを作動させるよう構成し、ドラフト操作手段で作業機を上昇させた際に、リフトアームが最上昇位置付近に上方揺動すると、該リフトアームの上昇動作を停止させるべく、上昇規制リンクによってドラフト用スプール作動レバーが、他端側を支点として押動部材が接当部から離れる方向に揺動され且つこれを許容するようにドラフトフィードバックロッドが縮むよう構成する。
(もっと読む)
苗移植機
【課題】 旋回時、植え付け装置を機械的に自動上昇させる、安価な苗移植機の実現。
【解決手段】 走行車体2の車輪10の方向を制御するピットマンアーム60と、走行車体2の後側に設けられ、昇降油圧シリンダによって昇降させられる植え付け装置と、植え付け装置の昇降、植え付けを設定するための植え付け昇降レバー33と、昇降レバー33の操作に従って、昇降油圧シリンダを制御するカム74、位置決めローラ77等と、ピットマンアーム60に連結された連繋部材61、62、64、71と、連繋部材61、62、64、71に連結された旋回切替操作具73とを備え、旋回切替操作具73は、操舵部材が所定量以上回動すると、カム74、ローラ77などを機械的に駆動することによって植え付け装置52を上昇させるモードと、操舵部材が所定量以上回動しても、カム74、ローラ77などを駆動しないモードが選択出来る。
(もっと読む)
農作業機
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
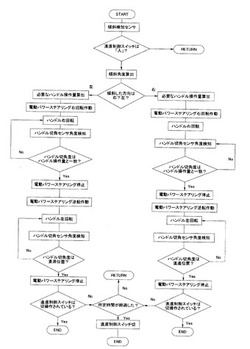
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
乗用型苗移植機
【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 ステアリングハンドルにて操向操作される左右前輪と、左右後輪を設けた走行車両に、苗移植作業装置を昇降自在に装着した乗用型苗移植機において、走行距離算出手段にて苗移植作業装置を上昇させる指令を出力してからの走行距離を算出して、該走行距離に応じて制御することにより、先ず苗移植作業装置が下降する指令を出力し、その後に線引きマーカを下降させる自動旋回モードを設けた。
(もっと読む)
トラクタ
【課題】エンジンのストールを防止するとともに、燃費の良い状態で作業を継続して行うことができるトラクタを提供する。
【解決手段】エンジンと、ロータリ耕耘装置と、昇降アクチュエータと、制御装置と、を備えるトラクタであって、制御装置は、エンジンのエンジン回転数Nrとエンジンの正味平均有効圧力Pmとの関係を示すマップにおいて予め設定される低燃費領域Zを記憶し、出力検出手段により検出されるエンジンの出力に基づいてエンジンの負荷率を算出し、エンジン回転数Nr及び正味平均有効圧力Pmが低燃費領域Zに含まれ、かつ負荷率が上昇用設定負荷率(設定負荷率)以上である状態が上昇用設定時間(設定時間)以上継続した場合、ロータリ耕耘装置を設定角度(設定上昇量)だけ上昇させる。
(もっと読む)
作業車両の油圧昇降装置
【課題】作業機の下降速度の調整と、作業機の下降のロックとを行うことのできる作業車両の油圧昇降装置において、作業機の下降速度の調整操作と、作業機の下降ロック操作とを違和感なく行うことができるとともに、製造コストを低く抑えることが可能な作業車両の油圧昇降装置を提供する。
【解決手段】作業機を昇降させるリフトシリンダ17を備え、流量制御バルブ18の開度調整によって作業機の下降速度が調整可能であるとともに、電磁バルブ19の閉作動によって作業機の下降をロックする作業車両の油圧昇降装置において、作業機の下降速度の増減を調整する下降速度設定器を設け、該下降速度設定器における作業機の下降速度を最小にする操作がされた場合には、電磁バルブ19を閉作動させることにより作業機の下降をロックするロック手段を設ける。
(もっと読む)
遠隔操作式農業用トラクター
【課題】本発明は、実際に農圃でトラクターに搭乗せずとも、離れた場所からトラクターを遠隔操作することによって、快適かつ安全に作業をすることができ、また、トラクターの過去の運転状態を記憶させることによって、同じ農圃であれば、無人で自動的に反復して農作業をすることができる遠隔操作式トラクターを提供するものである。
【解決手段】エンジンを動力とする走行装置と、前記エンジン駆動により作業機に回転動力を伝達する装置と、前記作業機を牽引しかつ昇降できる作業機用昇降機と、を有する農業用トラクターにおいて、前記農業用トラクターと離れた位置にある遠隔送信機の操作信号を受信し、前記操作信号により前記農業用トラクターの走行速度と走行方向と作業機への伝達回転と作業機の昇降とを制御する指令を出す制御装置を有することを特徴とする遠隔操作式農業用トラクター。
(もっと読む)
耕耘装置のリヤカバロック警報装置
【課題】耕耘装置のリヤカバーの上下動によって、この耕耘装置を車体に対して昇降して自動耕深制御を行わせる形態にあっては、前記リヤカバーの下動を規制することが多くあり、このリヤカバーの下動が規制されてロック状態にあるときは、このまま作業を行うことになるとロータリ耕耘装置が変形されたり、破損され易くなる。
【解決手段】トラクタ車体の後部に対してリフトアームにより昇降可能のロータリ耕耘装置に、この耕耘爪によって耕耘された土壌面を鎮圧均平するリヤカバーを設け、このリヤカバーの上下揺動によって耕耘装置を昇降して一定の耕深を維持制御する構成とし、前記リフトアームの下動によって耕耘装置を下降して前進走行したとき、リヤカバーの角度を検出するリヤカバセンサ7の入力によって、このリヤカバセンサ7が下り角を検出しているときは、リヤカバロック状態として警報する。
(もっと読む)
作業車両
【課題】
本発明の課題は、旋回時の車速が速く設定されている場合にあっても、植付作業部をタイミング良く下降させて畦に対する干渉や空植えを防止することにある。
【解決手段】
この発明は、操向ハンドルの左右旋回操作によって前輪が左又は右に操向操作されると、旋回外側の後輪の回転速度に対して旋回内側の後輪の回転速度が所定速度以下になったとき旋回内側のサイドクラッチを強制的に「入」にして旋回内側の後輪を所定の回転量だけ強制駆動する旋回制御手段(TC)を備えた作業車両において、機体旋回時に作業部を上昇させ、機体旋回開始後、所定角度旋回すると作業部を所定位置に下降させる作業部昇降制御手段(UD)を備え、車速が速く設定されている場合には、作業部の下げ速度を増速制御する下降速度制御手段(DV)を設けてあることを特徴とする。
(もっと読む)
対地作業部付設の作業車両
【課題】圃場における作業領域と作業能率を損なうことなく、機体旋回の終了間際のリスクを抑えて安定した作業走行の再開を可能とする対地作業部付設の作業車両を提供する。
【解決手段】作業車両は、作業位置に下降可能な作業部と、駆動輪の伝動を左右個別に切替え可能なサイドクラッチと、これら作業部およびサイドクラッチのそれぞれについて、直進時は作業位置および両側伝動、旋回時は非作業位置および旋回内側を非伝動に制御する制御部とを備えて構成され、この制御部は、操舵装置による旋回動作の開始により旋回走行距離を計測しつつ、次の直進動作の開始の時に、サイドクラッチを両側伝動に切替えるとともに、この時点以降で所定の旋回走行距離に至る間に、作業部を作業位置に切替えるものである。
(もっと読む)
オフセット作業機の作業方法
【課題】走行機体にオフセット作業が行えるように装着された作業機が、走行機体の移動と作業機自身の水平面内での回動及び移動により、圃場の作業部分から隅部分までの仕上げ作業が連続して行えるようにする。
【解決手段】走行機体2の前進走行に伴って前進する作業機1を一方の側にオフセットさせたときに、前記作業機1がその作業機1に介装された2種類の電動シリンダまたは油圧シリンダの伸縮により水平面内での前記走行機体2に対する2以上の水平回動の自由度を有するオフセット作業機を用い、前記走行機体2が前進走行しながら旋回したときに、前記作業機1に取り付けられた位置方位センサ20からの検出情報に基づいて前記2種類の電動シリンダまたは油圧シリンダの伸縮作動を自動制御することにより前記作業機1を水平面内で2以上に水平回動させながら、前記走行機体2に対する姿勢を連続的に順次変化させて前記作業機1自体の直進性を維持する制御を行う。
(もっと読む)
トラクタ
【課題】トラクタに作業機を連結する作業、或いは作業機を清掃する作業等において、作業者が地上に降りた状態であっても迅速にエンジンを停止させたり、或いはPTOクラッチを切り操作することができるようにする。
【解決手段】制御装置は、指令スイッチの何れか一つのスイッチが単独で入りとなった際には、ヒッチ機構を昇降又は傾斜させ、また、二つの指令スイッチが共に入りとなった際には、エンジンを停止させ、或いはPTOクラッチを切る。
(もっと読む)
移植機
【課題】機体の前後進走行の選択と走行速度を設定することができる変速操作具に植付作業機を上昇させる上昇スイッチ等を設けた移植機において、前記変速操作具の操作中に上昇スイッチを誤って押圧した時、植付クラッチが切れると共に植付作業機が上昇動作するといった不具合を解消する。
【解決手段】変速操作具33の把持部31aに、植付クラッチの切操作と植付作業機5の上昇操作を略同時に行なえる上昇操作スイッチ38を設けると共に、前記変速操作具31の操作状態を検出可能な操作状態検出手段33を設け、該操作状態検出手段33の植付作業中における変速操作具31の変速操作の検出に基づいて、前記上昇操作スイッチ38の操作による植付作業機5の上昇を牽制する昇降制御手段51を構成した。
(もっと読む)
畦成形機
【課題】水田等の圃場の作業残隅部の畦成形作業を走行機を後進させて行うような熟練を要する作業機ではなく、制御装置や制御プログラムが簡易で操作が簡単であるとともに、全体の製造コストを低くできる畦成形機の提供。
【解決手段】走行機が畦から離れる方向に旋回走行しながら直線状の連続した畦を成形する非平行走行畦成形作業が行える制御部を有し、非平行走行畦成形作業時は、畦成形作業部4に畦成形作業部4の進行方向の変位量を検知する検知手段6が設けられていて、変位量に基づき第2水平回動手段を作動させて畦成形作業部4の進行方向を一定方向とする制御を行うとともに、第1水平回動手段はフリー状態と固定状態を交互に予め設定した実行時間で繰り返し行う制御のみにより制御されて畦成形作業を行う畦成形機による。
(もっと読む)
1 - 20 / 56
[ Back to top ]