
Fターム[2B304QB03]の内容
Fターム[2B304QB03]の下位に属するFターム
作業機、作業部の相対角度 (27)
Fターム[2B304QB03]に分類される特許
1 - 20 / 92
水平制御装置
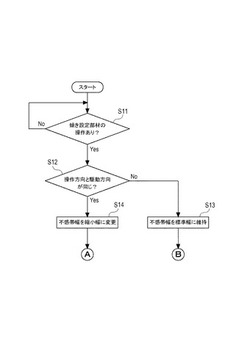
【課題】オペレータが移動させたい方向とは反対方向に制御対象部材の傾きが変更されるという不都合を確実に防止する。
【解決手段】水平制御装置において、制御装置は、傾き設定部材が操作されると、当該傾き設定部材の操作方向を把握すると共に、傾きセンサによって検出された前記傾き設定部材の操作前の状態における制御対象部材の実際の傾きと前記傾き設定部材の操作後の状態に応じて設定される目標傾きを基準とした縮小幅の不感帯との相対位置関係に基づいてアクチュエータによって前記制御対象部材が傾けられるべき傾斜方向を把握して、前記操作方向及び前記傾斜方向が同じか否かを判定し、前記操作方向及び前記傾斜方向が同じ場合には前記傾き設定部材の操作時に行う不感帯幅の縮小幅への変更を許容し、前記操作方向及び前記傾斜方向が異なる場合には前記傾き設定部材の操作時に行うべき不感帯幅の縮小幅への変更を禁止して不感帯幅を標準幅に維持する。
(もっと読む)
作業車両

【課題】
操舵部材を直進位置に保持して自動直進走行を行なうことができると共に、機体が傾斜すると自動的に進行方向を修正することのできる作業車両を提供する。
【解決手段】
走行車体2に操舵輪10を設け、操舵輪10を操作する操舵部材34を設け、走行車体2に機体の傾斜を検出する傾斜検知部材101を設け、傾斜検知部材101が左右方向の傾斜を検知すると操舵部材34を操作して走行車体2の進行方向を補正する作業車両において、操舵部材34を操作自在な自由状態と、操舵部材34を直進位置に保持する保持状態に切り替える操作切替部材103を設け、操作切替部材103を保持状態に操作していても傾斜検知部材101が機体の傾斜を検知すると、操舵部材34の保持を解除して傾斜方向の反対側に操作する構成とする。
(もっと読む)
乗用移植機
【課題】植付作業機を傾斜した地面に下ろす際に、植付作業機や強制傾斜機構の破損を防止する。
【解決手段】走行機体1の後部に昇降自在かつ左右傾斜自在に連結される植付作業機3と、植付作業機3の走行機体1に対する左右傾斜姿勢を水平制御モータ15の動力で強制的に変化させる強制傾斜機構19と、植付作業機3が水平姿勢を維持するように水平制御モータ15を駆動制御する水平制御手段と、スタンド姿勢と非スタンド姿勢とに変姿可能な状態で植付作業機3に設けられ、植付作業機3を地面に下ろす際にスタンド姿勢とされるスタンド装置23と、を備える乗用移植機であって、スタンド装置23の姿勢を検出するスタンド検出スイッチ29と、スタンド装置23がスタンド姿勢のとき、植付作業機3が走行機体1に対して平行となるように水平制御モータ15を駆動制御する平行制御手段と、を備える。
(もっと読む)
トラクター直装式ブームスプレーヤ
【課題】 ブームが実際に傾斜した場合にそのブームを速やかに、かつ適正に回動制御して迅速な傾斜角度の補正ができるトラクター直装式ブームスプレーヤを提供する。
【解決手段】 ブーム4が基部フレーム3に対してその重心近傍で回動自在に支持されているとともに、ブーム4を正逆方向に回動させるブーム回動手段8と、前輪車軸24の車体21に対する相対的な傾斜角度を計測する前輪傾斜角度計測手段9と、走行面の凹凸により後輪が傾斜する前に、前輪車軸の相対的な傾斜角度の方向と反対方向にブーム4を回動させるための準備をブーム回動手段8に実行させるブーム回動準備制御手段11と、ブーム4の基部フレーム3に対する相対的な傾斜角度を計測するブーム傾斜角度計測手段10と、ブーム4の相対的な傾斜角度が所定の範囲を超えた場合、回動準備中のブーム回動手段8を駆動してブーム4を制御するブーム回動制御手段12とを有する。
(もっと読む)
田植機
【課題】田植機において、ピッチング角等に基づく補正を適切に行い、良好な昇降制御性能を得ることができる構成を提供する。
【解決手段】制御部は、フロートの揺動角の検出値を、ピッチング角に基づいて補正して(ステップS106)、植付部を昇降制御するように構成されている。そして制御部は、ピッチング角の変化速度又は加速度が大きい場合には、前記補正を行わない。即ち、車体が急激なピッチング挙動を示すときには、ピッチング角による補正の影響を小さくすることにより、意図しない昇降制御が行われてしまうことを防止し、植付部の不必要な高さ変動を抑えることができる。
(もっと読む)
田植機
【課題】苗継ぎ作業時に、エンジンの回転数をアイドル回転数よりも低下させた場合でも、植付部を設定角度に維持することができる田植機を提供する。
【解決手段】エンジン14が搭載された走行部10の後方に植付部40を左右傾斜可能に装着した田植機1において、制御装置100は、苗継ぎ位置検出スイッチ23aのON信号を検出すると、エンジン14の回転数がアイドル回転数より低い設定回転数となるように第一アクチュエータ71を制御して、かつ、角速度センサ61の検出値Bを静止状態の検出値Bで置き換えて前記第二アクチュエータ72を制御する。
(もっと読む)
作業車両
【課題】作業機の圃場での作業深さの表示又は制御を低コストで行うことが可能な作業車両を提供することを課題としている。
【解決手段】本発明は、走行機体2に連結された作業機4を昇降させるリストアーム22を該走行機体2に設け、該作業機4の圃場での作業深さの表示又は制御を行う制御部32を備えた作業車両であって、前記リストアーム22のリフト角αを検出するリフト角検出手段33を備え、リフトアーム22のリフト角α情報及び該リフト角αとなる場合の作業機4の対地高さH情報からなるデータセットを、少なくとも2組以上、予め制御部32に記憶し、該制御部32は、前記2組以上のデータセットから、該作業機4におけるリフト角αと対地高さHの相関関係を求め、該相関関係に基づき、リフト角検出手段33からの検出値から、該作業機4の圃場での作業深さDを算出する。
(もっと読む)
作業車両
【課題】作業者が設定した所望の溝を圃場に精度よく形成することが可能な作業車両を提供する。
【解決手段】
トラクタは、圃場に自動制御によって溝を形成するに際し、まず、溝掘り作業機と圃場面との接地位置を検出する(S3)。そして、この接地位置を基準点として、溝掘り作業機を下降させることによって、溝の始端部において、設定された初期深さまで正確に溝を形成し、この始端部から所定の勾配で圃場に溝を形成する(S4)。
(もっと読む)
苗移植機
【課題】 本発明は、苗植付部の前後傾斜姿勢の制御は高精度で適正に行うことを課題とする。
【解決手段】 機体の走行の加減速を検出する走行加速度センサ(222)を設け、該走行加速度センサ(222)の検出に基づき、走行が加速されているときには苗植付部(4)を後上がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させ、走行が減速されているときには苗植付部(4)を後下がり側へ前後傾斜させるべく前後傾斜用アクチュエータ(203)を作動させる制御装置を設けた苗移植機とした。
(もっと読む)
トラクタ作業機の制御装置
【課題】本発明は、別の変更スイッチ等を設けることなく自動傾斜維持モードへの設定変更を容易に行えるようにする。
【解決手段】トラクタの車体1後部に作業機2をローリング可能に装着し、車体1に設けた傾斜センサ3の車体傾斜角検出に基づいてローリングシリンダ25を制御し、該ローリングシリンダ25のピストンロッドにより作業機2を水平に維持するトラクタ作業機の制御装置において、水平制御切換スイッチ33で作業機2を水平に維持する自動水平モードに設定した後に、作業機2の左右傾斜を調整する手動傾き調整スイッチ7,8の手動による傾き変更で水平に対する作業機2の傾斜角度を任意角度に設定可能にすると共に、この設定した傾斜角度を傾斜設定基準角度Aとして自動傾斜維持モードに移行して自動制御するようにしたことを特徴とするトラクタ作業機の制御装置の構成とする。
(もっと読む)
作業車両
【課題】走行機体の左右傾斜に拘わらず作業機を圃場面に対して予め定められた左右傾斜姿勢で保持させる左右傾斜制御を行う作業車両であって、低コストで、精度の高い左右傾斜制御を実行することが可能な作業車両を提供する。
【解決手段】前輪1側のフロントアクスルケース23の左右傾斜によって走行機体3が左右傾斜することを抑制するために、走行機体3をフロントアクスルケース23に左右傾斜可能に支持し、フロントアクスルケース23の左右傾斜角を検出する前輪側傾斜角検出手段と、走行機体3の走行速度を検出する車速検出手段とを設け、制御部は、前輪側傾斜角検出手段によって事前に検出されたフロントアクスルケース23の左右傾斜角と、車速検出手段からの検出結果とによって、走行機体3のその後の左右傾斜角を予測し、予測結果及び傾斜角検出手段36の検出結果に基づいて左右傾斜制御を実行する。
(もっと読む)
作業車両
【課題】機体後部に支持した作業機のローリング角度調節について、最小限の操作スイッチ構成と簡易な調節操作を確保した上で、傾斜センサによる一定傾斜の作業機による安定的な作業走行を可能とする作業車両を提供する。
【解決手段】作業車両は、ヒッチ(10)を介して支持した作業機(18)のローリング角度について、機体に備えた傾斜センサ(14)によって水平状態に維持する自動水平制御の適用の当否を水平切換スイッチ(43)の操作により切替え、自動水平制御の非適用時は、自動復帰構成の手動傾斜スイッチ(42a,42b)の左右の傾斜操作に応じてローリング角度を調節する制御部(35)を備えて構成され、上記制御部(35)は、自動水平制御の適用時に限り、所定時間を超える手動傾斜スイッチ(42a,42b)の継続操作に応じてローリング角度を調節するものである。
(もっと読む)
乗用草刈機
【課題】地上高を一定に保持可能なモアデッキを備える乗用草刈機を提供する。
【解決手段】電動ローンモア10が、モアブレードと、モアブレードを上方および側方から覆うモアデッキ15と、モアデッキ15を懸架するとともに、進行方向に延設されるメインフレーム18と、メインフレーム18の前部に取り付けられ、走行面の起伏を検出する前輪11と、メインフレーム18の後端と連結したシャーシ27と、前輪の検出した走行面の起伏に応じて、メインフレーム18をシャーシ27に対して上下回動可能とする回動筒73とを備える。
(もっと読む)
苗移植機
【課題】
圃場に凹凸がある度に植付部の植付深さが変更されると、かえって苗の植付深さが不安定になるため、機体が設定値以上傾斜するとアクチュエータの制御弁の作動時間が長くなる制御を行なう。
【解決手段】
苗を圃場に植え付ける植付装置4を備えた植付部5を走行車体8の後部に設け、植付部5を昇降させるアクチュエータ9を設け、センタフロート1の上下揺動によってアクチュエータ9の制御弁10を切り替えて植付部5を昇降させ、苗の植付深さを所定深さに維持する植付昇降制御可能に構成した苗移植機において、走行車体8に傾斜センサ11を設け、傾斜センサ11が検知する走行車体8の前後方向の設定値以上の傾斜を検出するとこの検出値から制御弁10を出力作動するまでの間の応答時間を長くする制御を行なう構成とする。
(もっと読む)
作業車両
【課題】対地作業機を牽引する作業車両において、傾き一定制御の実行中に走行機体を旋回させると、遠心力のせいで対地作業機が誤制御されるという問題を解消する。
【解決手段】本願発明の作業車両1は、走行機体2の後部にリンク機構を介して装着された対地作業機24と、該対地作業機24を前記走行機体2に対して左右に傾動させる傾斜制御アクチュエータ32と、前記走行機体2に設けられた傾斜検出手段81及び角速度検出手段82とを備える。前記両検出手段81,82の検出結果に基づく前記傾斜制御アクチュエータ32の駆動によって前記対地作業機24の傾き一定制御を実行するように構成する。前記傾き一定制御の実行中に前記走行機体2を旋回させた場合は、前記両検出手段81,82の検出結果に拘らず、前記対地作業機24が前記走行機体2に対して予め規定された設定角度となるように前記傾斜制御アクチュエータ32を駆動させる。
(もっと読む)
苗移植機
【課題】
走行車体が左右方向に傾斜すると、苗植装置が圃場面に対して略左右水平姿勢となるようにローリング駆動させ、苗の植付姿勢を安定させる苗移植機を提供する。
【解決手段】
圃場を走行する走行車体2の後部に苗を積載する苗載せ台4と、苗載せ台4の下部に苗載せ台4から苗を取って圃場に植える植付装置5からなる苗植装置6を設け、苗植装置6の傾斜量を検出する傾斜検知部材53を設け、傾斜検知部材53の検知に合わせて苗植装置6を左右方向に回動させるローリング機構Rを設けた苗移植機において、走行車体2に圃場の凹凸に対応して上下回動するローリング機構R2を設け、走行ローリング機構R2に所定量以上の回動を検知する走行ローリング検知部材49L,49Rを設け、走行ローリング検知部材49L,49Rが所定量以上の回動を検知したとき、ローリング機構Rの作動速度を減速させる構成とする。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
牽引作業車両の対地作業機昇降制御装置
【課題】本発明の目的は、昇降調節とともに傾動動作するいわゆる2Pリンク式のヒッチに装着された対地作業機について、その耕耘作業部の昇降誤差を抑えて所要の耕深を確保することができる牽引作業車両の対地作業機昇降制御装置を提供する。
【解決手段】牽引作業車両の対地作業機昇降制御装置は、傾動制御可能なリフトアーム2によって後部ヒッチ3を一体に支持し、この後部ヒッチ3に検出橇13を圃場面に追従可能に軸支し、その傾動角度と対応する圃場面からの高さに基づいて、上記後部ヒッチ3からその後方に延出して一体装着した作業機フレーム4aを昇降作動制御することにより、同作業機フレーム4aに支持される耕耘作業部6を耕深設定具24によって設定した目標の耕深Dに調節するように構成され、上記検出橇13の圃場面に対する角度dと対応する耕耘作業部6の高さを作業機フレーム4aの昇降角度値Δによって補正するものである。
(もっと読む)
耕深情報取得装置及びトラクタ
【課題】ロータリ作業機の傾き量を加味して、耕耘深度に関する情報を精度良く取得する。
【解決手段】揺動レーキ66、スプロケット78a,78b及びローラチェーン80が地面からの鉛直方向高さ位置の変化に応じて回転軸76aを回転し、ポテンショメータ74が、回転軸76aの回転量に関する情報を検出し、振り子部材72が、ロータリ作業機の地面に対する姿勢変化に関わらず、ポテンショメータ74の鉛直方向に対する姿勢を維持する。これにより、ポテンショメータで検出される回転軸の回転量に関する情報に、高さ位置の変化分のみならず、ロータリ作業機の地面に対する傾き量分も含めることができる。
(もっと読む)
農作業機
【課題】ローリングスプリング20と油圧ローリングシリンダ17によるロ−リング姿勢制御を自動的に切り替えることができる農作業機を提供することである。
【解決手段】所定時間内に走行部傾斜角センサ24の検出する傾斜角度の変化が所定範囲内であると、油圧ローリングシリンダ17が駆動制御しない状態として、緩衝部材20による苗植付装置6の姿勢変更を行い、前記傾斜角度の変化が所定範囲を超えると油圧ローリングシリンダ17によるロ−リング姿勢制御を行うように制御装置27がコントロールするので、苗植付装置6の姿勢変更を自動的に行うことができる。
(もっと読む)
1 - 20 / 92
[ Back to top ]