
Fターム[2B396LE02]の内容
脱穀機要素−籾処理 (10,947) | 穀粒搬送装置の移動又は変形 (893) | 穀粒搬送装置の移動又は変形 (389) | 回転又は回動(水平方向) (142)
Fターム[2B396LE02]に分類される特許
81 - 100 / 142
コンバイン
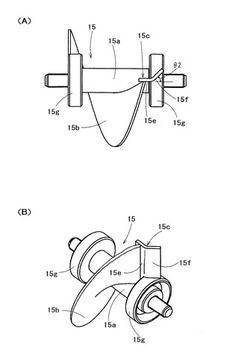
【課題】引継ぎラセンの終端部に跳ね出し板を備えるコンバインにおいて、跳ね出し板の大きさを確保しつつ、非搬送範囲における引継ぎラセンの駆動負荷を小さくする。
【解決手段】穀粒タンク4に貯留される穀粒を、縦ラセン14を回転自在に内装する縦パイプ8と、引継ぎラセン15を回転自在に内装し、縦パイプ8の上端部に直角方向を向いて接続される引継ぎパイプ9と、排出ラセン16を回転自在に内装し、引継ぎパイプ9の先端部に直角方向を向いて接続される排出パイプ10とを経由して機外に排出するコンバイン1において、引継ぎラセン15の終端位置に、穀粒を排出パイプ10に向けて跳ね出す跳ね出し板15cを設けるにあたり、該跳ね出し板15cに、逃げ角を持たない第一の跳ね出し面15eと、逃げ角を持った第二の跳ね出し面15fとを形成する。
(もっと読む)
粉粒体搬送制御装置

【課題】オペレータの手を煩わせることなく排出筒の往復左右回動動作ができてオペレータの作業負荷を軽減することができる粉粒体搬送装置を提供する。
【解決手段】粉粒体搬送制御装置は、粉粒体搬送装置の移送筒の先端まで移送された排出穀粒を案内投下する排出筒2の案内方向を左右の側方に傾斜させて左右回動動作させる制御部1から構成され、上記制御部1は、上記粉粒体搬送装置の排出稼動操作により、所定の角度範囲内で排出筒2を往復左右回動動作をさせ、その所定角度位置毎に一定時間の停留をするように制御するものである。
(もっと読む)
コンバイン
【課題】縦筒、横筒、伸縮筒及び排出筒からなる排出オーガ付きのコンバインにおいて、ユニバーサルデザインの観点から排出オーガに対する操作手段の操作性を向上させる。
【解決手段】無線式リモートコントロール装置101はL字状又は湾曲状の操作レバー103を備える。操作レバー103における横レバー部105の先端部には、その軸心r方向に沿ってのスライド操作と軸心r回りの首振り回動操作との2種類の操作が可能なグリップ部106を設ける。このように、リモートコントロール装置101における1本の操作レバー103に対して、排出オーガ8に対する水平旋回操作機能、起伏揺動操作機能、伸縮操作機能及び首振り回動操作機能という4種類の操作機能を集約することにより、排出オーガ8に対する4種類の操作を片手で実行できる。
(もっと読む)
粉粒体搬送装置
【課題】貯留タンクに貯留した粉粒体を所定の排出位置へ容易に排出させようとするものである。
【解決手段】粉粒体を貯留する貯留タンク6の後側には、粉粒体を機外へ移送排出し、一方側の側方外側へ回動自在な移送排出筒装置8を設けた構成において、該移送排出筒装置8は、下部移送筒9と上部移送筒10とに二分割すると共に、該上部移送筒10は下部移送筒9に対して長手方向に移動自在に構成すると共に、上部移送筒10の移送終端部には粉粒体を機外へ排出する排出口11aを有する排出筒11を設けたことを特徴とする粉粒体搬送装置の構成とする。
(もっと読む)
穀粒排出装置および該装置を配設する汎用コンバイン
【課題】バケットコンベアを内設する穀粒排出装置の誤作動を抑制しうる装置を提供する。
【解決手段】穀粒吐出口を設けたフード部とその下部に連設された外筒部とからなる外装体と、前記外装体の内部にバケットコンベアが配設され、前記バケットコンベアのバケット排出口と前記フード部の吐出口とが連設される穀粒排出装置において、前記フード部内壁であって、前記バケットから排出される穀粒の流れと平行する壁に圧力センサが設けられたことを特徴とする。前記圧力センサの感知面に圧力分散部材が配設されていてもよい。簡便な機構で、圧力センサの誤作動を防止することができる。
(もっと読む)
コンバイン
【課題】 穀粒タンク10から穀粒を搬出する縦スクリューコンベヤ22及び横スクリューコンベヤ23を備えたコンバインにおいて、横スクリューコンベヤ23が穀粒タンク10の上方で下降されても、穀粒タンク10に当たって変形や破損することを回避しやすいようにし、かつ、構造簡単に得られるようにする。
【解決手段】 穀粒タンク10の天板12からコンベヤストッパー部30を機体上方向きに突出させてある。コンベヤストッパー部30は、横スクリューコンベヤ23を下方から受け止め支持する。
(もっと読む)
コンバイン用の穀粒タンク
【課題】 タンク内に穀粒が残らないようにしながら底スクリューによって穀粒取り出しを行うコンバイン用の穀粒タンクでありながら、穀粒タンクの下方に空きスペースを設けなくて済み、かつ、タンク内穀粒のブリッジ現象を回避や解消することができるようにする。
【解決手段】 底板15を一対の回転支軸31を介して前壁板及び後壁板13に支持させてある。各回転支軸31は、偏芯回転体になっている。一方の回転支軸31は、底スクリュー18から動力伝達されて回転駆動され、他方の回転支軸31は、一方の回転支軸31から動力伝達されて回転駆動され、底板15は、穀粒載置面15aを水平またはほぼ水平面に維持しながら、底スクリュー18に対する遠近方向で、かつ水平またはほぼ水平方向に回転駆動されて振動する。底板15の穀粒載置面15aは、穀粒載置面上の脱穀粒との摩擦によって脱穀粒に移送力を与え、脱穀粒を底スクリュー18に供給する。
(もっと読む)
コンバイン
【課題】穀粒排出螺旋軸の軸端に固設した従動プーリと、駆動力入力側の駆動プーリとの間に係回したVベルトを、緊張状態と弛緩状態に切換えるテンションクラッチを備えたコンバインのベルト伝動装置において、前記Vベルトをベルトガイドの上側を通さずに誤って下側を通してしまうことによるテンションクラッチの作動不良や、場合によってはVベルトの破損が発生するといった不具合が起こることを防止する。
【解決手段】棒状のベルトガイド43の基端部を穀粒タンク17または機体12に支持すると共に、当該ベルトガイド43の先端部を機体12の構造物44に対してVベルト34の幅Wよりも近づけて配置した。
(もっと読む)
粉粒体搬送装置
【課題】穀粒を移送排出する移送排出筒装置の固定用移送筒へ挿入して、長手方向へ移動自在な移動用移送筒と、前部へ設けた排出筒とには、移動螺旋軸を軸支内装しているが、この排出筒で穀粒の詰りが発生すると、この移動螺旋軸を支持するスパンが長いことにより、変形することがあったが、これを防止しようとするものである。
【解決手段】移動螺旋軸9の移送終端部側は、前記排出筒14を形成する前側板14eの内側面へ装着した前支持メタル16aと、左右側板14dの天井部から吊り下げ状態に設けた中支持メタル16bとにより軸支して構成したことを特徴とする粉粒体搬送装置の構成としている。
(もっと読む)
コンバインのグレンタンク
【課題】カッターの下方に開口した排出装置の排出口に別途スクリューコンベアを接続して排出作業を行うため、一々、スクリューコンベアを着脱しなければならないという課題がある。
【解決手段】脱穀装置3の側部にグレンタンク5を設け、グレンタンク5の後方にはカッター7を設ける。グレンタンク5内の穀粒を排出する排出装置10の軸心を中心に側方回動するように排出用揚穀装置13を設ける。排出用揚穀装置13には、排出作業をしないとき排出用揚穀装置13に対して折り曲げて格納し、排出作業のときは排出用揚穀装置13を直線状態になるように排出オーガ14を取付ける。グレンタンク5の後側上部には、平面視、排出用揚穀装置13より脱穀装置3側であって、かつ、カッター7の上方に膨出する後側膨出部20を設けたコンバインのグレンタンク。
(もっと読む)
コンバイン
【課題】排出オーガの旋回位置を検出するポテンショメータのセットアップ作業の簡略化。
【解決手段】オーガ自動スイッチの操作を判断しS12、オーガ自動スイッチが操作されると、オーガ旋回ポテンショの検出値が基準範囲であるか否かを判断しS13、基準値範囲に対するオーガ旋回ポテンショ値の大小を判断しS14、オーガ旋回ポテンショ値が基準範囲よりも小さい場合には、オーガ旋回モータを右方向に駆動させS15、オーガ旋回ポテンショ値が基準範囲よりも大きい場合には、オーガ旋回モータを左方向に駆動させS16、オーガ旋回モータの駆動中は、間隔の長い断続音を電子ブザー50から出音させS17、オーガ旋回モータの駆動に応じてオーガ旋回ポテンショ値が基準範囲に入ったら、オーガ旋回モータの駆動を停止させると共に、間隔の短い断続音を電子ブザー50から出音させS18、オーガ自動セットアップ制御を終了する。
(もっと読む)
コンバインのグレンタンク
【課題】コンバインのグレンタンクの容量をアップする。
【解決手段】走行車体(1)の後部右側部にグレンタンク(4)を、後部左側部に脱穀部5を配設し、グレンタンク(4)の後部中央寄り後方近傍に穀粒排出用の揚穀オーガ筒(7)を立設する。グレンタンク(4)の右側後側部を後方に向けて膨出する後側膨出部(4a)に構成し、側面視で揚穀オーガ筒(7)の右側寄り近傍をグレンタンク(4)の後側膨出部(4a)で覆うように構成する。
(もっと読む)
コンバイン
【課題】搬送する作物の種類により、または扱胴の回転数に応じて、螺旋による搬送とエアによる搬送のいずれかを容易に選択でき、作業能率を向上させ、経済的なコンバインの提供である。
【解決手段】穀粒を分離処理する扱胴69を設けた脱穀装置7と、穀粒一時貯留用グレンタンク8と、穀粒を螺旋搬送する螺旋8cと、穀粒をエア搬送するエア搬送装置8b、18、20、13aと、扱胴回転数切替レバー42と、螺旋8cによる搬送を制御する排出テンションクラッチ32と、エア搬送装置8b、18、20、13aによる搬送を制御する排出テンションクラッチ25と、回転数切替レバー42の位置を検出して、該位置に対応した穀粒搬送装置を作動させる制御装置100を備える。また、制御装置100がグレンタンク8内の穀粒の搬送流路を、螺旋8c又は/及びエア搬送装置8b、18、20、13aに切り替える搬送流路切替装置8a、8e、47を制御しても良い。
(もっと読む)
粉粒体搬送装置
【課題】粉粒体の排出作業を容易で簡単にすると共に、排出作業開始の時に操作する排出スイッチの操作の視認性の向上を図ろうとするものである。
【解決手段】操作装置21aに排出スイッチ25aと、ランプ25bとを設け、該排出スイッチ25aの操作により、テンションモータ26aを始動させ、該テンションモータ26aで排出クラッチ装置26bを作動すべく設けた構成において、粉粒体を排出作業中に、前記排出スイッチ25aの切り操作により、排出クラッチ装置26cを停止制御すると共に、前記排出スイッチ25aのランプ25bを消灯制御する制御装置21fを設けたことを特徴とする粉粒体搬送装置の構成とする。
(もっと読む)
粉粒体搬送装置
【課題】粉粒体を移送排出する旋回自在な縦移送筒と、この縦移送筒の上端部へ昇降回動自在に、固定移送筒と移動用移送筒と排出筒等とを設けている。縦移送筒を確実に停止しようとするものである。
【解決手段】粉粒体を移送排出する旋回自在で略垂直状態に縦移送筒を設け、この縦移送筒の上端部に固定用移送筒を設け、該固定用移送筒の外周部へ挿入して長手方向へ手動により伸縮自在な移動用移送筒を設け、該移動用移送筒の移送終端部に粉粒体を排出する排出筒を設け、前記該移動用移送筒内には、伸縮自在な移動螺旋軸を軸支し、該移動螺旋軸の前後両側に前・後移動移送螺旋を軸支して、該前・後移動移送螺旋間には、複数の中移動移送螺旋を伸縮自在に軸支して設けると共に、前記縦移送筒には、旋回方向へ摩擦力で任意位置で固定する旋回用ブレーキ装置を設けたことを特徴とする粉粒体搬送装置の構成とする。
(もっと読む)
粉粒体搬送装置
【課題】穀粒を移送排出する移送排出筒装置の伸縮自在な移動用移送筒へ軸支内装した移動螺旋軸の前後両側へ前・後移動移送螺旋を設け、これら前・後移動移送螺旋間に複数の中移動移送螺旋を軸支して設けると共に、該前移動移送螺旋の全長を、使用する機種に応じ変えて、構成をシンプルにしようとするものである。
【解決手段】穀粒を移送排出する移送排出筒装置6の固定用移送筒8の外周部へ伸縮自在に挿入した移動用移送筒13へ軸支内装した移動螺旋軸9の前後両側に前・後移動移送螺旋11,10を軸支して設けると共に、該前・後移動移送螺旋11,10間へ複数の中移動移送螺旋12を軸支して設け、該前移動移送螺旋11の全長L5を、変更可能に構成する。
(もっと読む)
コンバイン
【課題】運搬車両の荷台に排出する際に、荷台の奥行を運転席から視認することは困難であり、荷台から穀粒がこぼれるのを回避するために荷台の手前側に排出すると、荷台の手前側に穀粒が片寄り作業効率が悪いという課題があった。
【解決手段】機外に穀粒を排出する排出筒(7)を、アクチュエータにより機体に対して旋回および昇降動作自在に構成して設け、排出筒(7)先端に排出口(32)を備えたコンバインにおいて、排出筒(7)に、排出口(32)から排出筒(7)長手方向への距離を外部より視認可能な排出筒位置視認用の指標(33)を設けた。
また、指標(33)は、排出筒(7)を長手方向で所定間隔毎に色分けた。
(もっと読む)
コンバイン
【課題】蓋部材が機体フレームの下方に落ち込まないように構成して、蓋部材や機体フレームの破損を防止するようにしたコンバインを提供することを目的とする。
【解決手段】機体フレーム2に水平方向に回転自在に支持され、穀粒を受け入れる作用姿勢P1と、機外に開放されて作用姿勢から外れたメンテナンス姿勢P2とに姿勢切り換え可能に構成されたグレンタンク13が設けられたコンバイン100において、前記グレンタンク13の下部には、タンク内部と連通するように開口された掃除口23と、一端側がグレンタンク13外壁に連結部材を介して取り付けられ掃除口23を開閉する蓋部材25とが設けられ、前記機体フレーム2には、グレンタンクが作用姿勢P1にある状態で、前記蓋部材25が機体フレーム2より下方に回動しない位置で当接する横フレーム2cが設けられる。
(もっと読む)
操作具
【課題】作業者等が、排出オーガを所望の方向に回動させるために必要な操作具での操作を容易に素早く認識することができ、且つ排出オーガの操作間違いが起こり難い操作具を提供する。
【解決手段】平面内で回転可能な回転台20と、該回転台20上に上下回動可能なレバー21とを具備するとともに、前記回転台20の回転を検知する手段26と、レバー21の上下回動を検知する手段27を具備し、前記レバー21の上下方向の回動角と旋回方向の回動角と、排出オーガ15の上下方向の回動角と旋回方向の回動角をシンクロさせた。
(もっと読む)
粉粒体排出装置
【課題】オーガ6の穀粒排出部21の左右回動角度の可能範囲が容易にわかり、排出オーガ6の穀粒排出口21aの詰まりを防止して、操作性や作業効率の良い粉粒体排出装置の提供である。
【解決手段】穀粒を排出するオーガ6の先端に設けられ、オーガ6の軸心に直行する方向に所定角度で左右回動する穀粒排出部21の左右回動角度をセンサ55により検知して、検知した左右回動角度の情報から左右回動可能な範囲を決定し、該可能な範囲の情報について報知手段52により報知させ、前記可能な範囲が限界に近づいた場合に前記報知内容を変化させる粉粒体排出装置により解決できる。また、前記報知手段52が音を発生するブザー52aであり、前記可能な範囲に関する情報について前記ブザー52aにより音を発生させる構成にしても良い。
(もっと読む)
81 - 100 / 142
[ Back to top ]