
Fターム[2B396LE02]の内容
脱穀機要素−籾処理 (10,947) | 穀粒搬送装置の移動又は変形 (893) | 穀粒搬送装置の移動又は変形 (389) | 回転又は回動(水平方向) (142)
Fターム[2B396LE02]に分類される特許
61 - 80 / 142
コンバイン
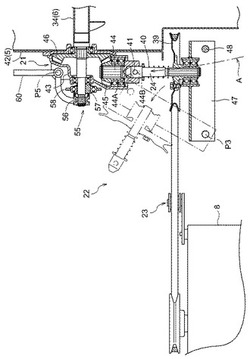
【課題】 穀粒タンクの揺動変位操作時における穀粒タンクと穀粒排出用の伝動系との干渉を回避しながら、穀粒タンクの容量の増大を図れるようにする。
【解決手段】 穀粒排出装置6を備えた穀粒タンク5を、その後部の縦軸心P1周りに作業位置とメンテナンス位置とに揺動変位可能に装備し、穀粒排出装置6の入力部21を穀粒タンク5の前部に配備し、エンジン8からの動力を入力部21に伝達する穀粒排出用の伝動系22を、エンジン8の出力軸9から入力部21に向けて延設し、穀粒排出用の伝動系22と入力部21とを、それらを伝動可能に連結した伝動状態と、その連結を解除した非伝動状態とに切り換え可能に構成し、穀粒排出用の伝動系22を、穀粒タンク5の揺動領域Aに入り込んで入力部21との連結を可能にする進入位置と、穀粒タンク5の揺動領域Aから外れて穀粒タンク5の揺動変位を許容する退避位置とに変位可能に構成する。
(もっと読む)
穀粒排出装置

【課題】穀粒排出筒2の自動収納時に、この穀粒排出筒2の自動短縮によって螺旋羽根間に穀粒を挟んでしまい、砕米や螺旋羽根の損傷が発生することを防止する。
【解決手段】グレンタンク(1)の内部から穀粒排出筒(2)先端部の穀粒排出口(7)に至る穀粒搬送経路中に穀粒検出センサ(8)を設け、該穀粒検出センサ(7)が搬送途中の穀粒を検出しなくなってから設定時間(T)が経過した後に自動旋回が開始された場合には、伸縮駆動装置(3)へ短縮作動出力が出力されて穀粒排出筒(2)が自動的に短縮し、穀粒検出センサ(7)が搬送途中の穀粒を検出しなくなってから設定時間(T)が経過する前に前記自動旋回が開始された場合には、伸縮駆動装置(3)への短縮作動出力が出力されないように、コントローラ(6)から伸縮駆動装置(3)への作動出力を牽制する。
(もっと読む)
穀粒排出システム
【課題】穀粒排出オーガによる穀粒排出位置を自動的に移動させて穀粒容器内に空隙が無くなるように穀粒を充填し、穀粒容器の容積を有効に利用して穀粒の運搬作業の能率を高める。
【解決手段】運搬車両側の穀粒容器8内を撮影可能なカメラを設ける。そして、該カメラによって撮影された画像の分析結果に基づいて、コンバイン側の穀粒排出オーガの穀粒排出口3を移動制御できるように構成する。また、撮影された画面の各分割画面A〜Iにおける特定の色彩の占有比率或いは明暗の比率の変動に基づいて、穀粒の堆積状態を検出できるように構成する。また、各分割画面A〜Iにおける穀粒容器8の内壁部分を穀粒によって隠すべく、穀粒排出オーガの穀粒排出口3を移動制御する。
(もっと読む)
コンバイン
【課題】増量タンク4bを、運転中のオペレータの後方視界を遮ることが少なく、安全な運転ができるものでありながら、タンク容量の増大に対応することができるものとする。
【解決手段】グレンタンク(4)を、走行車体(2)上に設置した定置タンク(4a)と、該定置タンク(4a)の上部に対して回動する増量タンク(4b)とから構成する。そして、定置タンク(4a)の上部における脱穀装置(3)側の位置に増量タンク(4b)の回動支点(P)を設けると共に、定置タンク(4a)の上部における脱穀装置(3)から遠い側の側板(5)を増量タンク(4b)の回動案内ができるように脱穀装置(3)側に向けて傾斜させて案内側板(5a)とする。
(もっと読む)
作業機の無線式操作装置
【課題】単発的な指令操作により停止指令が指令された場合でも、作業機の被操作部の作動をできる限り確実に停止させることができる作業機の無線式操作装置を提供すること。
【解決手段】作業機本体の被操作部の作動についての、停止指令を含む複数種の操作指令を作業機本体の機体側制御手段に無線信号にて指令する手動操作式の無線式指令手段42が、複数種の操作指令を指令する指令操作手段43〜50と、指令操作手段により複数種の操作指令のいずれかの操作指令が指令されると、その操作指令に対応する指令用無線信号を出力する出力制御手段53とを備えて構成され、機体側制御手段が、指令用無線信号にて指令される操作指令に基づいて、被操作部の作動を制御するように構成され、出力制御手段53が、停止指令が指令されている継続時間が継続操作判別用設定時間より短い場合は、その停止指令に対応する指令用無線信号を出力用設定時間に亘って出力するように構成されている作業機の無線式操作装置。
(もっと読む)
作業機の無線式操作装置
【課題】 無線式指令手段による被操作部の誤操作を防止することを、使い勝手を損なわずに行うことができる作業機の無線式操作装置を提供すること。
【解決手段】 被操作部の複数種の作動についての複数種の操作指令を機体側制御手段(H)に無線信号にて指令する手動操作式の無線式指令手段(42)が設けられ、無線式指令手段が、指令受付状態と指令拒否状態とに切換自在で、かつ、指令拒否状態であることを示す非送信動作状態情報を出力するように構成された出力制御手段を備えて構成され、機体側制御手段が、非送信動作状態情報を受信すると、被操作部の複数種の作動を停止させるべく、被操作部の作動を制御するように構成されている作業機の無線式操作装置であって、機体側制御手段が、非送信動作状態情報を受信したときに、複数種の操作指令のうち特定の特定操作指令に基づいて被操作部が作動している場合には、その被操作部の作動を継続させる作業機の無線式操作装置を構成した。
(もっと読む)
コンバインの穀粒排出構造
【課題】 コンバインの穀粒排出構造において、オーガの排出口から穀粒をトラックの荷台に排出する状態や、オーガの排出口から穀粒を籾袋に排出する状態の場合、作業能率を向上させる。
【解決手段】 オーガ8の排出口12からの穀粒の排出を許容する排出許容姿勢A2及びオーガ8の排出口12からの穀粒の排出を阻止する排出阻止姿勢A1に切換自在な排出切換部材29を、オーガ8の排出口12に備える。オーガ8の移動速度が高速であると排出切換部材29が排出阻止姿勢A1に操作され、オーガ8の移動速度が低速であると排出切換部材29が排出許容姿勢A2に操作されるように構成する。
(もっと読む)
コンバインのアンローダ
【課題】旋回範囲を360度以上確保することのできるコンバインのアンローダを、構造を簡素化することによって低コストで実現する。
【解決手段】横オーガを旋回可能に構成してあるコンバインのアンローダにおいて、アンローダの旋回部位8又は固定部位14の一方に突起部10aを備えるとともに、アンローダの旋回部位8又は固定部位14の他方に突起部10aが周方向における正逆方向から接当することによって横オーガの旋回範囲を規制する規制部20を備え、この規制部20を、突起部10aが周方向における正逆方向から接当すると所定の小範囲で正逆変位するように構成する。
(もっと読む)
コンバイン
【課題】排出オーガの旋回位置や旋回範囲をオーガ位置スイッチで検出するコンバインにおいて、オーガ位置スイッチの数よりも多い旋回位置や旋回範囲を判断可能にし、オーガ位置スイッチの数を抑える。
【解決手段】排出オーガ5の旋回位置や旋回範囲を検出しつつ、排出オーガ5の旋回動作を制御するコンバイン1において、排出オーガ5の旋回位置や旋回範囲を検出する複数のオーガ位置スイッチSW1〜SW3と、これらのオーガ位置スイッチSW1〜SW3から出力されるON/OFF信号の組み合せパターンに基づいて排出オーガ5の旋回位置や旋回範囲を判断する制御部18とを備える。
(もっと読む)
コンバイン
【課題】アクチュエータを介して昇降または旋回動作可能な穀粒排出オーガを、オーガ操作具の手動操作により格納位置であるオーガレストのオーガ受け上に旋回して格納する際の作業性を向上させる。
【解決手段】オーガ操作具34により穀粒排出オーガ29を下降動作させる時、オーガ位置検出手段43,44によって穀粒排出オーガ29がオーガレスト35上方の所定位置にあることを検出すると、穀粒排出オーガ29がオーガレスト35に自動的に格納されるように、当該穀粒排出オーガ29を昇降動作させるアクチュエータ31への一定時間の下降出力制御を実行するように構成した。
(もっと読む)
コンバイン
【課題】携帯電話機の無線通信機能を発揮することができるようにしたコンバインを提供すること。
【解決手段】グレンタンク13から伸縮自在の排穀オーガ15により穀粒を外部に排出する場合に排穀オーガ15の伸縮操作、穀粒の排出と運転停止を携帯電話機30を用いて行うことができる制御装置を備えたコンバインであり、普及率の高い携帯電話機30を用いてオーガ15を操作できるので、コンバインの操縦性が従来以上に高くなる。
(もっと読む)
コンバイン
【課題】排出作業において、穀粒排出装置の位置合わせを行う際に、操縦者や周囲の補助作業者が穀粒排出装置の移動方向を容易に認識できるものとして、排出筒を障害物に衝突させて破損させることを防止すると共に、作業能率を向上させる。
【解決手段】穀粒排出装置(7)を旋回自在及び伸縮自在に設け、該穀粒排出装置(7)の旋回操作又は旋回作動に関連して該穀粒排出装置(7)の旋回方向を表示する表示装置(8)を設ける。また、穀粒排出装置(7)の先端部の排出口(7d)を左右方向へ回動自在に構成し、該排出口(7d)の回動操作又は回動作動に関連して該排出口(7d)の回動方向を表示する表示装置(8)を設ける。
(もっと読む)
作業機の無線式操作装置
【課題】無線式指令手段の誤操作による被操作部の誤操作を防止できるものでありながら、被操作部を操作する場合の操作性の向上を図ることができる作業機の無線式操作装置を提供すること。
【解決手段】被操作部の作動についての複数種の操作指令を機体側制御手段に無線信号にて指令する手動操作式の無線式指令手段42が設けられ、無線式指令手段が、操作指令を指令する指令操作手段43〜50と、無線信号を出力する稼動状態と出力しない休止状態とに切換自在な出力制御手段53と、出力制御手段を稼動状態と休止状態とに切り換える動作状態切換手段56とを備え、動作状態切換手段が、出力制御手段が休止状態である場合に指令操作手段にて特定操作指令が指令されると、出力制御手段を稼動状態に切り換えるように構成されている作業機の無線式操作装置。
(もっと読む)
コンバインにおける穀粒排出用オーガの操作装置
【課題】 移動目的に適した速度で穀粒排出用オーガを移動させることができる使い勝手のよいコンバインにおける穀粒排出用オーガの操作装置を提供すること。
【解決手段】 制御手段が、端末側指令手段にて指令される指令情報BU,BD,BR,BLに基づいて昇降用アクチュエータ及び旋回用アクチュエータの作動を制御する場合の方が、機体側指令手段にて指令される指令情報CU,CD,CR,CLに基づいて昇降用アクチュエータ及び旋回用アクチュエータの作動を制御する場合よりも低速で穀粒排出用オーガが昇降作動及び旋回作動するように、昇降用アクチュエータ及び旋回用アクチュエータの作動を制御するように構成されているコンバインにおける穀粒排出用オーガの操作装置を構成した。
(もっと読む)
コンバインにおける穀粒排出用オーガの位置制御装置
【課題】 使用面において好都合なものでありながらも、作業能率の向上を図ることができるコンバインにおける穀粒排出用オーガの位置制御装置を提供すること。
【解決手段】 制御手段が、オーガ収納処理において穀粒排出用オーガを旋回用上昇位置に上昇させるときに、上昇開始から設定量又は設定時間上昇させるまでの初期の上昇においてはその後の上昇よりも上昇速度を低速とする形態で穀粒排出用オーガを上昇させるべく、オーガ駆動手段の作動を制御するように構成されているコンバインにおける穀粒排出用オーガの位置制御装置を構成した。
(もっと読む)
コンバイン
【課題】穀粒排出オーガの自動旋回に係る旋回指令手段をシンプルで操作が容易なものとし、かつ、穀粒排出オーガの自動旋回に係る誤操作を防止するコンバインを提供する。
【解決手段】穀粒排出オーガが停止する作業位置は、旋回セット操作スイッチ153を一回押す毎に、収納位置からの旋回量が最も小さい作業位置から順に大きい作業位置へ変更され、旋回セット操作スイッチ153を作業位置の数よりも一回多く押すと穀粒排出オーガ15の旋回が停止し、さらに旋回セット操作スイッチ153を一回押すと再び穀粒排出オーガ15が停止する作業位置が収納位置からの旋回量が最も小さい作業位置に変更される。
(もっと読む)
オーガ制御装置
【課題】オーガ機構の所望旋回位置への移動操作を作業性良く行うことのできるオーガ制御装置を提供する
【解決手段】旋回用アクチュエータ134によってオーガ機構15を旋回軸線回りに旋回させるように構成されたコンバイン201のオーガ制御装置は、制御装置100と、オーガ機構15の旋回角度θを設定する旋回角度設定手段20と、オーガ機構15の旋回角度θsを検出する旋回角度検出手段40とを備え、制御装置100は、旋回角度設定手段20による旋回角度θを設定旋回角度として記憶し、該設定旋回角度θ及び旋回位置検出手段40による検出値θsに基づき、オーガ機構15が該設定旋回角度θに位置するように旋回用アクチュエータ134を作動させる。
(もっと読む)
コンバイン
【課題】排出オーガの収納時に発生する無駄な時間を省き、速やかに作業に復帰することを可能とし、穀粒搬送作業を潤滑に進めることのできるコンバインを提供する。
【解決手段】縦排出オーガ15aと横排出オーガ15bから構成される穀粒排出オーガ15と、該穀粒排出オーガ15を旋回させる旋回装置34と、前記穀粒排出オーガ15を昇降させる昇降装置30とを備えたコンバインにおいて、前記横排出オーガ15bの旋回角度と仰角を測定するための測定手段35及び37を備え、排出位置を検知するとともに、排出位置から予め設定した機体干渉を避ける位置までの水平方向と垂直方向の距離を演算し、旋回装置34と昇降装置30を同時に駆動して機体干渉を避ける位置まで到達するように前記旋回34装置及び昇降装置30を制御した。
(もっと読む)
コンバイン
【課題】 機体上部に配管された排気装置と排出オーガとの干渉を防止したコンバインを提供する。
【解決手段】 刈取り、脱穀、選別後の籾を貯留するグレンタンク17と、上下方向と水平方向に回動自在に配置されて、前記グレンタンク17より籾を排出する排出オーガ21と、機体13上に搭載されたエンジン35に接続されて、機体13上方から排気ガスを排出する排気装置41と、を備えたコンバイン11であって、前記排気装置41と干渉する可能性のある領域に前記排出オーガ21を侵入させないようにする。これにより、コンバイン11の機体13上部に配管された排気装置41と排出オーガ21との干渉を防止することができる。
(もっと読む)
排出オーガ操作装置の配置構造
【課題】従来、グレンタンクから穀粒を取り出す排出オーガを、収納位置から排出位置に移動させるための手動操作レバー等の操作装置は、運転席の後側に配置されており、排出オーガの操作レバーがどこにあるか判らないことがあった。そこで、初心者でも排出オーガの操作レバーを容易に認識できるようにしようとする。
【解決手段】 運転席21側部にアームレスト38を備えるコンバイン1であって、グレンタンク13内の穀粒を外部に取り出す排出オーガ18を操作する手段39を、アームレスト38に回動自在に設けた。
(もっと読む)
61 - 80 / 142
[ Back to top ]