
Fターム[2B396RA28]の内容
Fターム[2B396RA28]に分類される特許
1 - 20 / 40
コンバイン
【課題】排出オーガが排出作業の状態であると判断手段により判断されると脱穀クラッチを切断して脱穀部を停止する脱穀部を備えたコンバインを提供する。
【解決手段】穀粒排出クラッチ検出手段で穀粒排出クラッチの断接状態を検出し、穀粒排出クラッチの接続状態が穀粒排出クラッチ検出手段により検出されて、排出オーガ作動状況判断手段によって、排出オーガが作動状態であると判断されると、クラッチ操作装置によって脱穀クラッチが切断されて脱穀装置7が停止する。
(もっと読む)
コンバイン

【課題】作業者の意に反して排出オーガが自動的に動き出してしまうのを防止することができるコンバインを提供する。
【解決手段】排出オーガ32と、排出オーガ32を昇降又は旋回させるオーガ用アクチュエータと、排出オーガ32が載置されるオーガレスト21と、排出オーガ32がオーガレスト21に載置されていることを検出するオーガレストセットセンサ57と、複数の操作手段を有し、前記操作手段の操作に応じて、排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、前記遠隔指示に基づいて前記オーガ用アクチュエータを駆動制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、前記複数の操作手段のうち特定の複数の操作手段(オートリターンボタン80k及びシフトボタン80m)が同時に操作された場合、排出オーガ32をオーガレスト21に載置させるように自動的に昇降又は旋回させる。
(もっと読む)
コンバイン
【課題】排出オーガが自動的に昇降又は旋回することを防止すると共に、オートセット機能の作動時において遠隔操作装置(リモートコントローラ)の無線通信に使用される電波が本機に届かなく場合であっても、排出オーガの自動的な昇降又は旋回を緊急に停止させることができるコンバインを提供する。
【解決手段】前記制御手段60は、前記複数の操作手段(ボタン80a・80d等)のうち特定の操作手段(オートセットボタン84)への操作に応じて送信された遠隔指示を継続して受信している場合には、前記排出オーガ32を自動的に所定の高さまで上昇させた後、所定の方向へ旋回させる一方、その継続していた当該遠隔指示の受信が途絶えた場合には、当該排出オーガ32の自動的な上昇又は旋回を停止させる制御を実行するものである。
(もっと読む)
汎用コンバイン
【課題】刈取部に設けたリールが所定以上の高さに上昇駆動された場合であっても、該リールと、オーガとの衝突を防止できるとともに、オーガの自動収納位置の切換え忘れを防ぐことにより、オーガの自動収納の誤操作によるリールとオーガの衝突も効率的に防止できる汎用コンバインを提供することを課題としている。
【解決手段】オーガ9が平面視リール17とラップした第1収納位置Bと、オーガ9が平面視リール17とラップしない第2収納位置Aとを前記制御部75に設定し、オーガレスト32を、第1収納位置Bのオーガ9を受止める第1受止め位置と、第2収納位置Aのオーガ9を受止める第2受止め位置とに切換可能に、走行機体2側に支持し、前記制御部75は、オーガレスト32が第1受止め位置の場合には、オーガ9が第1収納位置に収納され、オーガレスト32が第2受止め位置の場合には、オーガ9が第2収納位置に収納されるように自動制御を実行する。
(もっと読む)
コンバイン
【課題】撮像手段により穀粒吐出口から排出された穀粒の貯留状態を確認するための画像情報を得ることができるものでありながら、撮像手段が損傷を受けるおそれを少なくすることが可能なコンバインを提供する。
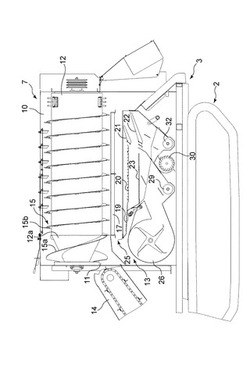
【解決手段】穀粒タンクの穀粒を揚送する縦送りコンベアの上端部に、穀粒を横送りして穀粒吐出口19から穀粒を機外に排出する横送りコンベア20が、起伏揺動可能に且つ縦送りコンベアの縦向き軸芯を中心にして格納位置と穀粒排出位置とにわたり旋回可能に設けられ、穀粒吐出口19の下方側箇所を撮像する撮像手段28が、横送りコンベア20における円筒状の外筒部31の下側箇所に、外筒部31の軸芯方向視で、穀粒吐出口19の下端位置L1よりも上方に位置するとともに外筒部31の横幅方向外端位置L2よりも横幅方向内方側に位置する状態で備えられる。
(もっと読む)
コンバイン
【課題】穀粒を排出する際の遠隔操作装置による操作を簡素化し、作業性を向上させることができるコンバインを提供する。
【解決手段】排出オーガ32と、収納位置または排出位置に切り換え可能な穀粒排出筒体40と、オーガクラッチ33と、排出オーガ32がオーガレスト21に載置されていることを検出するオーガレストセットセンサ57と、無線通信を用いて排出オーガ32の動作についての遠隔指示を送信する遠隔操作装置80と、遠隔操作装置80からの遠隔指示に基づいて各種アクチュエータを駆動制御する制御手段60と、を具備するコンバイン1であって、制御手段60は、排出オーガ32がオーガレスト21から離れたことを検出した後、オーガクラッチ33を接続する旨の遠隔指示を最初に受信した場合、穀粒排出筒体40を排出位置に切り換えた後にオーガクラッチ33を接続させる。
(もっと読む)
コンバインにおけるオーガの排出部構造
【課題】コンバインを狭い格納庫などに格納する際、オーガの排出口を開閉させるアクチュエータを障害物に接触させて破損する可能性を低減させる。
【解決手段】茎稈を刈り取る前処理部2と、刈り取った茎稈から穀粒を脱穀して選別する脱穀部3と、選別した穀粒を貯留する穀粒タンク4と、穀粒タンク4内の穀粒を先端部の排出口12から排出する旋回自在なオーガ5と、を備えるコンバイン1において、オーガ5の排出口12を開閉するオーガフラップ15と、オーガフラップ15を開閉駆動させる電動モータ19と、を設けるにあたり、オーガ5を機体上方に格納したとき、運転部8から見える排出口12の右外側面に電動モータ19を配置すると共に、電動モータ19を覆うフラップカバー21を設ける。
(もっと読む)
コンバイン
【課題】穀粒量検出センサの出力から外乱の影響を除去することができるコンバインを提供する。
【解決手段】一番スクリューコンベア23の回転数に基づいて投口センサ23aの検出結果を補正することによって、投口センサ23aの検出結果から外乱の影響を抑制し、穀粒タンク4に貯留した穀粒量を精度良く検出することができる構成とした。また投口センサ23aは圧力センサである場合、圧力センサへ作用する穀粒からの圧力は、穀粒量が同じであっても、一番スクリューコンベア23の回転数によって異なるが、当該差異を補正することによって、投口センサ23aの検出精度を高めることができる構成とした。
(もっと読む)
コンバイン
【課題】圧力検出手段の検出結果及び穀粒量の関係を示す関数に、圧力検出手段の取付位置及び取付姿勢、並びに刈取る品種に応じた適切な係数を使用し、貯留部に貯留する穀粒量を正確に検出することができるコンバインを提供する。
【解決手段】投口センサ23aの検出結果及び演算して求めた穀粒量に基づいて未知係数を求めて、実関数を導出し、投口センサ23aの穀粒タンク4への取付位置並びに取付姿勢の差異、及び刈取る品種などの諸条件に応じた適切な実関数を穀粒量の検出に使用する構成とした。
(もっと読む)
コンバイン
【課題】排出オーガを遠隔操作装置により操作する際に、排出オーガの作動が意図せず停止することを極力回避して、作業性の低下を抑制することができるコンバインを提供する。
【解決手段】前記遠隔操作装置80は、前記作動開始用操作手段(自動右セット・リターンボタン80a)が操作されると、動作確認信号を前記制御手段60へ間欠的に送信し、前記制御手段60は、前記動作確認信号を第一設定時間を超えて受信しなければ、前記作動用アクチュエータ(各アクチュエータ35・37)を駆動制御して、前記排出オーガ32の作動を停止させる。
(もっと読む)
コンバイン
【課題】穀粒センサによって排出装置の駆動を自動的に停止するとともに、整備点検時には自動的に排出装置の駆動を停止しないコンバインを提供する。
【解決手段】脱穀装置(3)によって脱穀した穀粒を一時貯留する貯留装置(5a)と、該貯留装置(5a)内の穀粒を機外へ排出する排出装置(6)を設け、
前記貯留装置(5a)内の低位置に貯留された穀粒を検出する穀粒センサ(19)を設け、該穀粒センサ(19)によって穀粒が検出されている状態で排出装置(6)を駆動操作した場合は、貯留装置(5a)内の穀粒の減少に伴い穀粒センサ(19)によって穀粒が検出されなくなってから所定時間が経過した後に排出装置の駆動を自動的に停止させ、前記穀粒センサ(19)によって穀粒が検出されていない状態で排出装置(6)を駆動操作した場合には、該駆動操作が行なわれている間に亘り排出装置(6)の駆動を継続する排出制御装置(67)を設けた。
(もっと読む)
コンバインの姿勢安定装置
【課題】コンバインの走行フレーム上の重量変化を検出して実際に走行フレームが傾く前にバランス装置を作動させて機体の重心位置が変化しないようにすることで、機体の前後左右の水平を維持して、脱穀装置の選別性能を良好に維持する。
【解決手段】コンバインの走行フレーム(1)上に備えたグレンタンク(2)との機体中心対称位置に、二次元的に移動可能なバランスウエイト(3)を備えたバランス装置(4)を設け、グレンタンク(2)内に設ける穀粒センサ(S1,S2,S3,S4)の穀粒溜まり具合の検出結果に基づいて、グレンタンク(2)内の穀粒が増加しても機体全体の重心位置が変化しないように前記バランス装置(4)を作動させる構成とする。
(もっと読む)
コンバインにおける排出オーガの制御装置
【課題】排出オーガ内に穀粒が残った状態から排出を再開した場合に、排出口で穀粒が詰まるという問題を解決する。
【解決手段】穀粒が貯留される穀粒タンク4と、穀粒タンク4内の穀粒を機外に排出する排出オーガ5と、排出オーガ5の動力を入り切りする排出クラッチと、排出オーガの排出口13を開閉するシャッタ14と、穀粒排出スイッチ32の操作に応じて、排出クラッチ及びシャッタ14を制御する制御装置20とを備えるコンバイン1において、制御装置20は、穀粒排出スイッチ32の排出開始操作に応じて、排出クラッチの入り制御及びシャッタ14の開放制御を行うにあたり、排出クラッチの入り動作開始タイミングを、シャッタ14の開放動作開始タイミングに対して遅延させる。
(もっと読む)
伸縮式穀粒排出オーガ
【課題】伸縮式穀粒排出オーガによる穀粒排出作業を中断してこのオーガを短縮させる際に、オーガ内に残留した穀粒の圧縮を防止して該オーガの螺旋の破損を防止する。
【解決手段】伸縮搬送螺旋(1)の基部を、固定搬送螺旋(3)の先端から穀粒の受継ぎを可能に接続するが、伝動上は分離、独立した伸縮式穀粒排出オーガ(5)を構成し、固定搬送螺旋(3)は、排出クラッチ(8)経由の動力で、伸縮搬送螺旋(1)は、搬送筒(2)に装備した制御モータ(9)で、それぞれ伝動される構成とし、制御モータ(9)は、排出クラッチ(8)の切り操作後、伸縮用搬送筒(2)内の残留穀粒が無くなるまで伸縮搬送螺旋(1)を伝動する構成とする。
(もっと読む)
伸縮式穀粒排出オーガ
【課題】伸縮式穀粒排出オーガによる穀粒排出作業を中断してこのオーガを短縮させる際に、オーガ内に残留した穀粒の圧縮を防止して該オーガの螺旋の破損を防止する。
【解決手段】伸縮式穀粒排出オーガにおいて、伸縮搬送螺旋(1)の基部側を、固定搬送螺旋(3)の先端側にワンウェイクラッチ(8)を介して伝動可能に連結し、伸縮搬送螺旋(1)は、排出クラッチ(9)の入り操作によって固定搬送螺旋(3)を介して伝動され、切り操作に伴って、伸縮用搬送筒(2)の制御モータ(10)から伝動される構成とし、伸縮搬送螺旋(1)は、伸縮用搬送筒(2)内の残留穀粒がほとんど無くなるまで伝動される構成とする。
(もっと読む)
コンバイン
【課題】オーガを支持位置に適切に旋回操作でき、オーガを支持位置に正確に位置決めできるコンバインを提供する。
【解決手段】グレンタンク及びオーガを機体の後部に備え、運転部及び受け部を機体の前部に備え、オーガの旋回操作範囲を、受け部の上方の支持位置P1と横向きの排出位置P2との間でかつ運転部の上方を通過しない範囲に設定し、オーガ又は支持部58の一方に被検出体66を設け、オーガ又は支持部58の他方に検出体68を設けて、オーガが支持位置P1に位置したことを検出する停止位置検出手段94を構成し、被検出体66又は検出体68の位置をオーガの旋回方向に沿って調節可能な停止位置調節機構70を設けてある。
(もっと読む)
コンバイン
【課題】作業機の稼働に連動したエンジン制御によって効率的なエンジン動作を確保するとともに、排出装置の穀粒詰まりを招くことなく、安定した穀粒排出を可能とする排出オーガ付きコンバインを提供する。
【解決手段】排出オーガ付きコンバインは、排出クラッチ(52)により穀粒を排出動作する排出装置(54)と、この排出装置(54)を稼動させるための操作具(67)と、この操作具(67)の操作信号によってエンジン(10)を所定回転以上に制御する制御装置(200)とを備えて構成され、上記排出装置(54)は、制御装置(200)によって排出クラッチ(52)を断接制御可能に構成し、かつ、制御装置(200)は、上記操作具(67)の信号によってエンジン(10)が所定回転に達したときに排出クラッチ(52)を接続する連繋制御機能を備えるものである。
(もっと読む)
コンバインの穀粒搬出装置
【課題】横送り筒が下降側の停止予定箇所へ到達する前にその起伏揺動位置を検出するできるようにするとともに、起伏位置検出装置を、他物と干渉する可能性の少ない状態で、かつ、メンテナンス作業も行い易い状態で設ける。
【解決手段】縦送り筒55と、その縦送り筒55の上端側における水平方向の揺動軸心x周りで起伏揺動自在に構成された横送り筒56の起伏揺動位置を検出する起伏位置検出装置6を、前記縦送り筒55と横送り筒56との接続箇所55D,56Dにおける下向き面側に設けてある。
(もっと読む)
コンバイン
【課題】アクチュエータを介して穀粒排出オーガを起伏または旋回作動させるオーガ操作具を穀粒排出オーガの先端部に設けたコンバインにおいて、無理なく良好な操作フィーリングで穀粒排出オーガの起伏または旋回作動が行なえるオーガ操作具を提供する.
【解決手段】オーガ操作具31を、上下左右の操作面31a,31b,31c,31dと、該操作面31a,31b,31c,31dの押動操作に対応する連動スイッチ32a,32b,32c,32dと、該連動スイッチ32a,32b,32c,32dを切り状態に復帰付勢する弾機35を有して上下左右方向に押動操作自在な多方向操作スイッチで構成し、該多方向操作スイッチの上下左右何れかの方向への押動操作に対応する連動スイッチが入り状態となった時、前記多方向操作スイッチの押動操作方向と同方向に穀粒排出オーガ13の起伏または旋回作動がなされるようにした。
(もっと読む)
コンバイン
【課題】燃料消費量の節減、エンジンによる騒音の低減、排気ガスの減少による雰囲気の清浄化によって、住環境の保全に寄与すると共に、穀粒排出作業の能率を高め、収穫作業全体の能率を向上させる。
【解決手段】排出クラッチ(95)を介して入力されるエンジン(68)の駆動力と排出クラッチ(95)を介することなく入力される電動モータ(83)の駆動力とのうち、他方よりも高速回転となった側の駆動力を穀粒排出装置(5a)側へ出力する伝動切換装置(69)を設け、電動モータ(83)の駆動力による穀粒排出装置(5a)の駆動を起動操作した場合に、エンジン(68)を自動的に停止させる制御装置(111)を設ける。また、電動モータ(83)の駆動力による穀粒排出装置(5a)の駆動を停止操作した場合に、エンジン(68)を自動的に始動させる制御装置(111)を設ける。
(もっと読む)
1 - 20 / 40
[ Back to top ]