
Fターム[2C150DA25]の内容
玩具 (16,863) | 動作形態(飛翔、走行、歩行を含む) (1,579) | 人又は動物の部分動作 (426) | 頭の一部又は顔の一部 (62)
Fターム[2C150DA25]に分類される特許
41 - 60 / 62
人形状置物
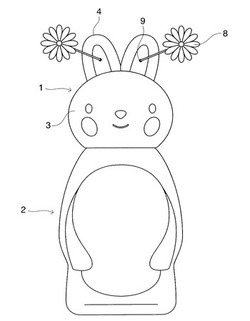
【課題】構造が簡単であり且つ意外性や奇抜性に基づく訴求力に富む人形状置物を提供する。
【解決手段】少なくとも一部の付属物を人形本体から引き戻し力を伴って引き出すことができる人形状置物であって、人形本体は、中空部7を形成し表面形状を画定する外壁6を備え、付属物8は、外壁6に形成された貫通孔9を通って中空部7内から外壁6外へ延びる弾性線条13の端部に結合されており、弾性線条13は、中空部7内において、貫通孔9から離れて外壁内側に設けられた係止部16に係止され、常時は付属物8を外壁6にほぼ接した状態に保持していることを特徴とする人形状置物。
(もっと読む)
人形用頭部

【課題】リアルな眼球を用い、瞳の色を1眼球あたり2色持ち、この眼球を回転させることで、瞳色の切り替えが容易に行うことができ、顔面外側から磁石によって視線を動かすことが可能な人形用頭部を得るとともに、多色の眼球の組み合わせをたくさんの中からユーザーが選択できる人形用頭部を得る。
【解決手段】眼球は1個の眼球を、同じ形状の2つの眼球パーツに分割して、それぞれに眼球瞳を描き、これを組み合わせて1眼球あたり2つの瞳を持つことができる。また、受け皿とスプリングによって眼球を眼窩奥に対して押し込むことがでるので、眼球を回転させても瞳部分の突起と瞼の間の干渉がおきず、眼球を裏返すことができる人形用頭部を実現する。また、眼球内部に磁石を2つの内蔵し、それぞれの極が向かい合う状態にしておき、外側と異なる極の磁石を取り付けた制御棒により、眼球に手を触れずに視線を動かすことができる人形用頭部を得る。
(もっと読む)
人形玩具
【課題】関節の動きの自由度が大きく、人形に様々な姿勢をとらせることができ、且つ安定感に優れた人形玩具を提供する。
【解決手段】頭部2と、胴部3と、胴下部4と、腕部5と、脚部6とから構成される人形玩具1であって、胴部3は、頭部2、胴下部4、腕部5を連結させるための球体連結部13を有し、胴下部4は、球体連結部13を嵌め合わせるための球状凹部及び脚部6を連結させるための球体連結部14を有し、腕部5は、肩部51、上腕部52、下腕部53及び手部54で構成され、肩部51は胴部3の球体連結部13に連結され、上腕部52は肩部51に挿着され、上腕部52と下腕部53、下腕部53と手部54は球体連結部材11で連結され、脚部6は、上脚部61、下脚部62及び足部63で構成され、上脚部61は胴下部4の球体連結部14に連結され、上脚部61と下脚部62、下脚部62と足部63は球体連結部材12で連結された人形玩具とする。
(もっと読む)
コニュニケーションシステム
【課題】ペット型ロボットの動作を、単調で物足りなくならないような、しかも連帯感の持てる感情のこもった、動作とすることにより、良好なコミュニケーションが取れるコミュニケーションシステムを提供する。
【解決手段】一方のコミュニケーション装置で行われた操作者の動作を、他方のコミュニケーション装置に伝達するコミュニケーションシステムにおいて、一方のコミュニケーション装置1は、操作者の動作を検出する動作検出手段4と、動作検出手段4で検出された操作者の動作に応じて感情信号を生成し保持する感情生成手段5と、感情信号を他方のコミュニケーション装置3に送信する送信手段6と、他方のコミュニケーション装置3から送信された感情信号を受信する受信手段7と、感情信号を表示部に出力する情報出力手段8と、を備える。
(もっと読む)
ロボットシステム
【課題】取り扱いが容易でかつ一般社会で十分に活用されるロボットを備えた安価なロボットシステムを提供することである。
【解決手段】携帯電話30が充電器20にセットされると、携帯電話30のコネクタCN2が充電器20のコネクタCN1に電気的に接続される。それにより、携帯電話30と充電器20との間で各種信号および電力が伝送される。CPU32は、充電器20の脱着センサ21、充電器20の充電容量センサ22および時計モジュール34からの信号を受け、メモリ33に記憶された通信制御プログラムに従って通信モジュール31を制御するとともに、メモリ33に記憶されたロボット制御プログラムに従ってロボット10を制御する。
(もっと読む)
ペット型ロボット
【課題】安価で広範な種類の四足動物を模したペット型ロボットを楽しむことができる外皮被着構造を備えたペット型ロボットを提供する。
【解決手段】ロボット本体1は、四足動物の体型を模した共通の筐体f1を有している。被覆体2は、ロボット本体1に着脱自在に被覆し、各四足動物を模した容姿が個別に異なっている。ロボット本体1は、胴体部3と、胴体部3に取り付けられる頭部4と、胴体部3に取り付けられ、少なくとも歩行可能な複数の可動脚5a〜5dと、を備えている。
(もっと読む)
動作表出装置
【課題】人間とのより自然な対話を実現するロボットを実現する
【解決手段】耳等の特徴的な構成部品を少なくとも含む特徴部と胴体部と頭部とを備え、音声入力手段と制御部とを有するロボットを開示する。制御部は、音声入力手段を介して入力される音声を認識して該音声の指示に対応する動作を制御し、上記特徴部屈曲させる関節及び、胴体部と頭部とを接続する関節とを制御することで感情を表現する。
(もっと読む)
魚釣りゲーム玩具
【課題】簡単な構造で実際の魚釣りの雰囲気を味わうことができるとともに、電池の消耗などを気にすることなくリアル感のある魚釣りを楽しむことができる魚釣りゲーム玩具を提供すること。
【解決手段】釣竿2で魚体1を釣り上げる魚釣りゲーム玩具において、上記魚体1を凸面状に湾曲形成された板部材で構成するとともに略中央に口を模して円形の開口部3を形成し、上記釣竿2は竿部6の先端に螺旋溝9が形成された軸体7を吊り下げる懸垂部8を配置し、この懸垂部8には上記軸体7を公転させる駆動機構Dを設け、この駆動機構Dを中心からやや外れた位置に貫通孔25が形成されハンドル10の操作で回転する駆動歯車17と、軸体7の回転を阻止する回転阻止部35とで構成し、上記軸体7の上部を上記貫通孔25を貫通させるとともに、軸体7の上端を上記回転阻止部35に連係させた。
(もっと読む)
多表情フィギュア
【課題】 操作部材を操作し、その後操作を解除しても眼球体が元の位置に戻らず、二つ以上の異なる表情を表現することができる多表情フィギュアの提供。
【解決手段】 頭部の内部で回転軸支される眼球体を回転させるための操作機構部を備えた多表情フィギュアにおいて、頭部の眼球孔部と対向可能な外周面を有し、外周面上に第1の表情の目模様と第2の表情の目模様とを少なくとも付した回転体と、回転体に設けられ頭部の内部で回転可能に軸支される角軸であって、第1の表情の目模様に対応する第1の面と第2の表情の目模様に対応する第2の面を少なくとも有する角軸とから構成され、操作機構部の操作で第1の表情の目模様と第2の表情の目模様を露出させる。
(もっと読む)
人形の首部連結構造
【課題】着脱操作が極めて容易な人形の頭部に対する首部の連結構造を提供する。
【解決手段】頭部1は、少なくとも一箇所の開口2を設けるとともに、首部連結孔4を備えた中空状に形成され、少なくとも、前記頭部1の首部連結孔4に挿入可能な係止部17と、該係止部17を上下方向に伸縮可能な弾性部材19と、前記係止部17を上下移動かつ左右回転可能に上端に備える首部本体6とで構成された首部5と、前記頭部1内に配され、該頭部1の首部連結孔4の内周縁に当接可能な当接面21と、頭部1内にて、前記首部連結孔4を介して挿入された前記係止部17を挿通可能な挿通孔部22と、前記弾性部材19の弾性に抗して上方に引き上げるとともに、所定方向に回転させた前記係止部17を、前記挿通孔部22からずらした位置で係止する受け部23とで構成された被係止部材20からなる。
(もっと読む)
玩具
【課題】より娯楽性の高い玩具を提供すること。
【解決手段】魚焼きグリルを有するガスレンジを模した本体部21の前面に、瞼を模した身体部22Aを配設し、本体部21の下面に脚を模した身体部22B、22Cを配設し、本体部21の左右両側面に腕を模した身体部22D、22Eを各々配設して擬人化する。操作入力部25B、25Cからの入力に応じて身体部22Aが上下して瞬きを真似、身体部22B、22Cが交互に伸縮してスウィングを真似る。更に、操作入力部25A〜25Cからの入力に応じて音声出力部23及び光出力部24A〜24Cが各々出力する。また、本体部21の上面後部に配設された擬似コック帽27がトースタの動作を真似る。
(もっと読む)
表情付け音声発生装置
【構成】 表情付け音声発生装置10は、コンピュータ22を含み、このコンピュータは、手人形(12)を操作する手に装着する手袋型センサ(14)に設けられるセンサ161a‐164,181および182からのセンサ値に基づいて、解釈テーブル24を参照して、その手人形のジェスチャを同定し、そのジェスチャを、ジェスチャ−表情対応テーブル26を参照して、モーフィング点(モーフィング率)にマッピングする。そのモーフィング率に従って、歌声データベース28に予め蓄積されている元歌声(normal, dark, whisper, wet)をモーフィングして、スピーカ34から発音する。この手は手人形の反り返りの程度で音量を制御する。
【効果】 ジェスチャによって音声モーフィングを制御することができる。
(もっと読む)
ロボット装置及びその制御方法
【課題】
本発明は、簡易な構成で感情表出を行い得るロボット装置及びその制御方法を実現するものである。
【解決手段】
上下2分割の瞼を有する瞼開閉部80を、撮像機能を有する眼球部72の前方に設けるとともに、当該眼球部72の後方に設けた瞼回転部90によって瞼開閉部80を回転駆動するようにしたことにより、瞼の開閉量及び傾斜角を自在に変化させて様々な表情を表出することができるとともに、表情表出機構全体を簡易化及び小型化することができる。
(もっと読む)
ロボット装置及びその表情制御方法
【課題】
本発明は、簡易な構成で、ユーザとの間で適切なインタラクションを行い得るロボット装置及びその制御方法を実現するものである。
【解決手段】
表情生成部106が、ユーザ発話やロボット装置自身の発話に応じて表情表出を制御することにより、あたかもロボットが発話に応じた感情を抱いているかのような自然な印象をユーザに対して与えることができる。
(もっと読む)
人形
【課題】顔に目、鼻、口、耳を描かずに木肌を露出させて木目を生かした表情や木肌の温もりを残し、腕部を可動できる人形を提供する。
【解決手段】人体と同形状の頭部12、頸部14、肩部16、腕部18、胴部20、腰部22、大腿部24、脛部26、足部28を、すべて木材で構成し、腕部18と肩部16とを、腕部18に設けられた腕貫通孔30に挿通され、かつ肩部16から胴部20の背面を貫通する胴貫通孔34に挿通されて胴部20の背面で結束された上紐36を介して連結し、足部28における木目模様38を正面44から見て縦方向に表れるようにした。
(もっと読む)
ネットワーク基盤のロボットシステムで動作含みのマルチメディアコンテンツを再生するための処理方法
【課題】本発明はネットワーク基盤のロボット用動作含みのマルチメディアコンテンツを再生するための処理方法に関するものである。
【解決手段】ロボット端末機などとこの端末機を制御するサービスサーバーを含むネットワーク基盤のロボット制御システムを用いて動作含みのマルチメディアコンテンツを再生するための処理方法において、サービスサーバーが、マルチメディアコンテンツファイルに端末機用動作制御データを挿入し、動作含みのマルチメディアコンテンツデータパケットなどを形成して貯蔵する段階;ユーザーが、特定端末機で特定コンテンツを再生しろと命令をすれば、この命令が前記サービスサーバーへ伝送される段階;前記命令により、前記サービスサーバーが前記コンテンツに対応するデータパケットを読み出し、順に前記端末機へ伝送する段階;前記端末機が、前記データパケットを順に貯蔵し、順に読み出して再生する段階を含むことを特徴とする。
(もっと読む)
シリコンゴム製人形用眼球部品
【課題】
本発明は、ガラス玉やアクリル樹脂の特徴である透明性と表面の輝きを保ちながら、人間のような柔らかさを有し、かつ装着性に優れた弾力性のある人形用の眼球を提供する。
【解決手段】
本発明は、人形用の眼球であって、白目部分を形成する白色に着色されたシリコンゴム3、及び当該白色に着色されたシリコンゴムを覆う目の角膜部分に相当する透明なシリコンゴム2からなり、これらのシリコンゴムの硬度が、ショアA硬度で1〜50の範囲にあり、かつ白色に着色されたシリコンゴムのショアA硬度が透明なシリコンゴムのショアA硬度よりも小さいことを特徴とする人形用眼球、その製造方法、及びその人形用眼球が装着されてなる人形に関する。
(もっと読む)
ロボット用人工皮膚
【課題】引張りに対する耐久性に優れるロボット用人工皮膚を提供する。また、顔の表情が変化する顔ロボットに用いられた場合に、人間のように自然な表情を作り出すことができるロボット用人工皮膚を提供する。
【解決手段】人工皮膚10は、ほぼ全面に補強布22が埋設されたゴム基材20から構成されている。補強布22の表面側には、小面積の補強布24が止め布として補強布22に重ねて埋設されている。糸状部材26は、リング部材16を補強布22及び補強布24に留め付けるように、補強布22、補強布24、及びリング部材16の孔を複数回貫通し、リング部材16に複数回(図3では3回)巻回されている。また、糸状部材26は、ゴム基材20の外表面に突出しないように巻回されている。このようにリング部材16を補強布22及び補強布24に留め付けることで、リング部材16が人工皮膚10のゴム基材20の裏面にしっかりと取付けられている。
(もっと読む)
テキストビジュアル音声(TTVS)合成方法及びコンピュータで実行可能なプログラム
【課題】仮想的または物理的なロボットがあたかも実際に話しているかのように口を動かすために必要な情報を生成できるようにする。
【解決手段】 TTVS合成方法は、オーディオ音声単位特定マークとそのそれぞれの口の動きの軌跡パラメータとのマッピング(32)を確立するステップと、それぞれ継続時間長が付された音声単位特定マークのリストを準備するステップと、それぞれの継続時間長がリストで特定された、リスト中の各音声単位について、口の動きの軌跡を表すパラメータ(60)を連結するステップと、連結された口の動きの軌跡パラメータに従って、人工の口を駆動するための口駆動信号を発生するステップ(62)と、を含む。
(もっと読む)
2足歩行玩具
【課題】簡単な構造で組立も容易な構造で以て2足歩行玩具を提供すること。
【解決手段】尾部を有する自走式の2足歩行玩具において、尾部が左右方向に揺動自在に構成されると共に左右方向の複数位置で接地可能に構成され、接地した尾部の左右方向位置に応じて自動的に舵取りを行うように構成されていることを特徴とする。
(もっと読む)
41 - 60 / 62
[ Back to top ]