
Fターム[2C150EF29]の内容
玩具 (16,863) | 感知、検出 (1,002) | 感知、検出手段(操縦手段を含む) (510) | 音又は声 (102)
Fターム[2C150EF29]の下位に属するFターム
特定の音又は声に反応 (21)
Fターム[2C150EF29]に分類される特許
21 - 40 / 81
送信装置
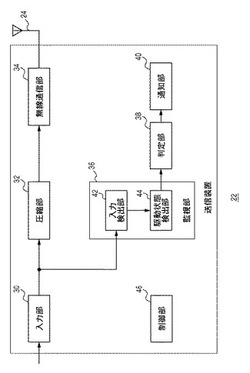
【課題】撮像装置が搭載された模型の存在を周囲に知らしめる技術を提供する。
【解決手段】送信装置22は、モータの駆動によって動作可能な模型車両に搭載される。入力部30は、模型車両に搭載された撮像装置が撮像した画像データを入力する。無線通信部34は、入力した画像データを送信する。監視部36は、入力部30が画像データを入力している場合に、モータの駆動状態を監視する。通知部40は、監視部36において監視している駆動状態に応じて、画像データの入力を通知する。
(もっと読む)
操舵機能付走行玩具

【課題】 簡単な構成で確実に転落や衝突による停止を防ぎ、動作も単調になりにくくした操舵機能付走行玩具を提供することにある。
【解決手段】 本体2には、上下に可動する支持体としてのアーム部材4が取り付けられている。アーム部材4には、転動方向が設定角度内で可変するように回動自在にキャスタ6が取り付けられている。キャスタ6の車輪6cは、キャスタ本体6aの回動中心から偏心した位置に配置されている。駆動輪8は、駆動部14により駆動される。駆動部14は、キャスタ6の車輪6cが接地してアーム部材4が上がっていると、前進するように駆動輪8を駆動し、車輪6cが脱落してアーム部材4が下がると、一定時間後退するように駆動輪8を駆動する。キャスタ6の車輪6cは、前進又は後退するときに、キャスタ6に回転力が作用し、転動方向が変わる。これにより、左右にも進行方向が変わることになる。
(もっと読む)
ロボットおよび音声認識装置ならびにプログラム
【課題】音声認識の精度を向上させること。
【解決手段】音声をデジタル化して音声データを出力するマイクロフォン14と、マイクロフォン14から出力された音声データと辞書に登録された単語とを照合することで音声を認識する音声認識装置50とを備え、音声認識装置50は、複数の音声認識エンジンを有する第1処理部61を備え、一の音声認識処理部は、他の音声認識処理部とは異なるタイミングで、かつ、他の音声認識処理部の音声認識期間内に、音声認識を開始するロボットを提供する。
(もっと読む)
ヘリコプター玩具
【課題】 操縦が容易であって、且つ、スティックレバーで操縦する場合とは異なる嗜好を提供可能である音声によって操縦可能なヘリコプター玩具を提供する。
【解決手段】 本発明のヘリコプター玩具1は、送信機と、ヘリコプター形状の飛行体と、を備え、この飛行体は、充電式電池と、ロータと、ロータを回転駆動するモータと、受信回路を有した飛行体側制御回路とを備え、送信機は、操作者が発する音声指示を識別する音声識別手段107と、音声識別手段107によって識別された音声指示に対応して所定の操作信号を出力する信号生成手段109と、補助操作スイッチ59と、を備え、音声指示は、モータの回転始動を指示する第1の指示と、飛行体の上昇を指示する第2の指示と、飛行体の高度の維持を指示する第3の指示と、飛行体の下降を指示する第4の指示と、モータの回転の停止を指示する第5の指示と、を含む。
(もっと読む)
ゲーム装置
【課題】 音声対話システムをゲーム機に組み込んだ場合、ゲーム機が大きくなり、持ち運びに不便で、しかも、落下させた際、水没させた際に、損傷が大きい。
【解決手段】 音声対話システムを構成するマイク17、スピーカ21、音声認識ボード55、対話処理部71のうち、マイク17、スピーカ21が被対話体(ゲーム機11または可動ユニット15A)に備えられ、音声認識ボード55、対話処理部71がサーバ13に備えられるようにし、被対話体とサーバ13との間を有線または無線で接続した。
(もっと読む)
浅い眠り動作を繰り返す人形
【課題】 上下瞼を徐々に閉じたり、開いたりする動作を繰り返して、あたかも眠気をもよおしてトロンとまどろませ、今にも眠りそうになって目の焦点が合わないような仕草を繰り返す人形を提供する。
【解決手段】 一端を軸着した揺動基板に磁石体と矢尻型パーツを取り付け、磁石体を吸着引き寄せるための金属片を配設し、前記矢尻型パーツの内部には上下切欠溝を凹設し、この上下切欠溝にそれぞれ別個に収納されるように上下並行連結バーを配設し、上下並行連結バーの離間距離を接離自在に調整する回転式のカム部材を配設し、矢尻型パーツの前方位置に目玉部材を配設し、この目玉部材の前面に、目玉部材を覆うことが可能な上下瞼部材を開閉自在に配設し、この上瞼部材は前記の下並行連結バーと一体的に、下瞼部材は前記の上並行連結バーと一体的に構成し、磁石体への反発押し戻し力を発揮することができる電磁石を設置し、この電磁石に音センサーを設置したこと。
(もっと読む)
ビートトラッキング装置、ビートトラッキング方法、記録媒体、ビートトラッキング用プログラム、及びロボット
【課題】雑音に対するロバスト性を確保するとともに、テンポ変動への追従性及びテンポ推定の安定性を確保する。
【解決手段】音楽音響信号MAから自己音声信号SVの音声成分をエコーキャンセルした音響信号にフィルタ処理を行い、オンセットを強調したオンセットベクトルを出力するSobelフィルタ部21と、オンセットベクトルに正規化相互相関関数を用いた時間周波数パターンマッチングを行ってビート間隔信頼度を求める時間周波数パターンマッチング部22と、ビート間隔信頼度に基づいてビート間隔を推定してテンポTPを出力するビート間隔推定部23とを備えた。
(もっと読む)
ロボット
【課題】携帯電話を容易に着脱することができ、移動時などに携帯電話が外れてしまうことを防ぐことのできるロボットを得る。
【解決手段】可動部を備えたロボットであって、携帯端末200を挿入する挿入口110と、挿入口110に挿入された携帯端末200と電気的に接続する接続端子130と、挿入口110に挿入された携帯端末200を固定する固定手段120と、接続端子130を介して携帯端末200に電気信号を送信する送電手段140と、送電手段140の動作を制御する制御手段150と、を備え、挿入口110を当該ロボットの本体筐体の外面に設けた。
(もっと読む)
鉄道模型の効果音発生装置
【課題】 低コストで、走行音の変化を忠実に再現する。
【解決手段】 鉄道車両模型が走行する少なくとも2つのレール部材80a、80bが、両者の間にギャップを有する状態に、ベース6c上に配置され、前記ギャップ付近を外して配置した枕木100、102を介してベース6cに固定されている。ギャップ付近にピエゾ素子16が配置され、鉄道車両模型が走行する際に発生する振動音を検出する。
(もっと読む)
移動体搭載用のロボット及びこれを搭載した移動体
【課題】運転者を含めた全ての乗員が移動体内で快適に過ごすことができる移動体用のロボットを提供する。
【解決手段】移動体或いは乗員から受ける諸条件を認識する認識部12と、この認識部12により認識された前記諸条件に対応するための思考を行う思考部14と、前記移動体に沿って所定位置に移動するための移動部16と、思考部14による結果に基づき必要な動作を実行する動作部18とを含む、移動体搭載用のロボットにおいて、思考部14にはロボット自らが行動するための自律思考部が設定され、該自律思考部は前記認識部12が認識した前記諸条件に基づき前記移動部16及び動作部18を駆動させて自律制御を実行し、前記自律制御には、前記移動体から受ける該移動体の挙動に対して移動状態或いは停止状態のロボットの体勢を安定に保持できるように移動部16及び動作部18を駆動制御する自己保持モードを含み、自律性を備えて乗員に種々のサービスを提供する移動体用のロボット10である。
(もっと読む)
揺動玩具
【課題】 使用者が癒されるという感情を想起させるような緩やかな動作を行う揺動玩具を提供する。
【解決手段】 揺動玩具1は、胴体部2と、該胴体部2の上部に配置される頭部3と、を備え、胴体部2は、その内部に頭部3を回転可能に頭部支持軸により支持する頭部支持部材と、駆動源と、プーリを介する減速機構と、リンク機構と、制御手段と、を有し、リンク機構は、減速機構の最終段に設けられる偏心カムと、頭部3に固定されるリンクピンと偏心カムとに枢結されるリンク部材と、から成り、制御手段が生成する制御信号に基づいて駆動源を駆動し、該駆動源の回転力が減速機構を介して偏心カムに伝達され、該偏心カムが円運動をすることにより、リンクピンが上下動し、頭部3が頭部支持部軸を回転中心として胴体部2に対して左右方向に揺動するものとする。
(もっと読む)
ロボットの好感度形成装置及びその方法
【課題】本発明は、ロボットとヒトとの情緒的インタラクションを通じて、互に好感度を形成する装置及びその方法を提供する。
【解決手段】本発明は、ユーザーの入力した特徴値の入力を受けてロボットとユーザーとの個人的な親密度を計算し、ロボットrとユーザーiとが他のユーザーとの関係の中で形成する緊張度を計算して、ユーザーに対するロボットの好感度を計算する好感度生成部と、前記好感度生成部を通じて生成されたロボットの好感度によってロボットの感情強度を調節し、ロボットの行動の前・後に好感度を表現する行動を付け加えて表現する好感度表現部と、前記好感度表現部を通じて計算されたユーザーに対するロボットの好感度表現程度と、ユーザーの感情的反応の入力を受けて、2つの情報の差異に基づいて利益を計算し、これを利用してユーザーの入力特徴値を更新する好感度学習部とを包含する。
(もっと読む)
楽器演奏ロボットおよび楽器自動演奏方法
【課題】周囲温度の差異、楽器の器差の影響等により発生する音高のずれを自動修正する。
【解決手段】本発明の一態様に係る楽器演奏ロボットは、演奏動作を行い楽器の演奏を行う楽器演奏ロボットであって、演奏動作により演奏した楽器の演奏音を入力するための音情報入力部31と、音情報入力部31に入力された演奏音の音高と基準音高とを比較し、音高のずれを判別する判別部と、判別部で判別された音高のずれに基づいて、演奏動作を修正する修正部とを備える。
(もっと読む)
人形吊り下げ玩具
【課題】美感を維持しつつ、駆動機構への糸の絡まりを抑制する。
【解決手段】人形吊り下げ玩具であって、人形を収納するための容器と、容器のフタと、人形を吊り下げるために人形にその一端が結合された複数の吊り下げ部材と、複数の吊り下げ部材の少なくとも1つを駆動する、フタの内部に設けられた駆動機構とを含む。
(もっと読む)
コミュニケーションロボット及びその制御方法
【課題】対象者に応じて適切な発話を行うことができるコミュニケーションロボットを提供する。
【解決手段】対象者と会話によってコミュニケーションを図るコミュニケーションロボットであって、対象者の年齢及び反応に応じて発話信号の音量及び/又は周波数を制御する。コミュニケーションロボットは、対象者の年齢を判定する年齢判定部と、年齢判定部によって判定された前記対象者の年齢を入力する年齢入力部と、対象者の反応を判定する反応判定部と、反応判定部によって判定された前記対象者の反応を入力する反応入力部と、年齢入力部に入力された前記対象者の年齢及び反応入力部に入力された対象者の反応に応じて発話信号の音量及び/又は周波数を制御する発話制御部と、を有する。
(もっと読む)
ロボット装置及びその制御方法
【課題】利用者に対してよりパーソナルなロボット装置を提供する。
【解決手段】過去における各利用者による操作履歴や対話履歴、及びロボット感情値を状態管理テーブル123に保持する。本ロボット装置の人物特定手段108は新たに遭遇した人物が過去の利用者であることが判明すると、感情・性格性格手段106は現在のロボット感情値122と状態管理テーブル123に保存された該当人物の過去のロボット感情値を参照して、新たなロボット感情値を生成する。
(もっと読む)
ロボット及びその制御方法
【課題】簡略な構造で軽い優れたロボットアームを備える新たなロボットを提供する。
【解決手段】ロボット本体と、前記ロボット本体に設けられ、前記ロボット本体に対して回転可能な第1肩関節と、前記第1肩関節にその一端側が設けられ、前記第1肩関節と共に前記ロボット本体に対して回転可能な支持部と、前記支持部の他端側に設けられ、前記支持部に対して回転可能な第2肩関節と、前記第2肩関節にその一端側が設けられ、前記第2肩関節と共に前記支持部に対して回転可能なアーム部と、を備えることを特徴とするロボット。
(もっと読む)
電磁石を用いた人形駆動装置
【課題】密閉された容器中の人形を磁気力を用いてより正確で繊細に駆動させることによって様々な動作を表現できるようにした、電磁石を用いた人形駆動装置を提供する。
【解決手段】本発明は、複数の補助磁極を装着している人形20を、液体が充填されている密閉容器10に入れ、電磁石33により極性が決定される可変磁極35を容器の周囲に配置することによって、人形20の各部位に引力または斥力を作用させる。各可変磁極の極性は電磁石33に流れる電流の方向を調節して任意に制御できるので、容器内部11の人形20を様々な動作にさせることができる。これにより、人形20を複雑なロボットの形態にせずとも、音楽に合わせて踊らせる等、色々なおもしろい動作が表現可能である。
(もっと読む)
赤外線操作玩具
【課題】主に、廉価で、かつ、受光感度の良好な赤外線操作玩具を提供すること。
【解決手段】操作指示信号を生成し、生成された操作指示信号を赤外線送信する送信装置と、前記送信装置とは別体で、前記送信装置から送信された操作指示信号を赤外線センサによって受信し、当該受信された操作信号に対応する駆動制御信号を出力する受信装置を持ち、当該駆動制御信号に応じて制御される駆動装置によって所定の動作を行うように構成された動作体と、を備える赤外線操作玩具において、前記赤外線センサの受光部は、プラスチック材からなるカバーによって覆われるとともに、当該カバーの内面に当接されている。
(もっと読む)
情報処理システム、ロボット装置及びその制御方法
【課題】表示画面上に表示される画像と関連してユーザとの間で情報の入出力を行う場合に、ユーザの負担を減らすことのできる情報処理システムを提供する。
【解決手段】表示画面上に画像を表示する表示装置と、ユーザとの間で情報の入出力を行うロボット装置と、を含み、現実空間における表示画面の位置を取得し、取得される表示画面の位置に基づいて、ロボット装置を移動させる情報処理システムである。
(もっと読む)
21 - 40 / 81
[ Back to top ]