
Fターム[2C150EF29]の内容
玩具 (16,863) | 感知、検出 (1,002) | 感知、検出手段(操縦手段を含む) (510) | 音又は声 (102)
Fターム[2C150EF29]の下位に属するFターム
特定の音又は声に反応 (21)
Fターム[2C150EF29]に分類される特許
61 - 80 / 81
反応出力装置
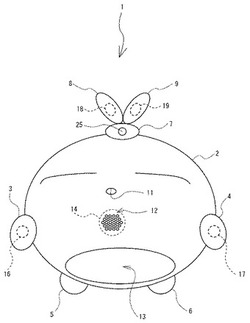
【課題】ユーザを識別して、そのユーザの動作から受ける印象に応じて反応を出力できる反応出力装置を提供する。
【解決手段】反応出力装置1では、好悪の程度を数値で表現した好悪判定値を用いることによって、ユーザ毎に好悪の程度を記憶できる。この好悪判定値はユーザ毎にそれぞれ設定され、反応出力装置1に対して行われるユーザの所定の動作の種類によって、そのユーザに設定された好悪判定値のみが更新される。この好悪判定値の更新は、ユーザの動作の種類毎に各々設定された好悪値が、好悪判定値に加算(又は減算)されることによって行われる。そして、好悪判定値のレベルに対応して香りの種類がそれぞれ設定されている。よって、ユーザの好悪判定値に対応する特定の香りが香り放出口11からユーザに提示されることで、反応出力装置1のユーザに対する好悪の程度をそのユーザに提示できる。
(もっと読む)
発音玩具

【課題】 歌唱や伴奏に合わせて動き、カラオケも楽しめる人形を提供することで、飽きることのない玩具を提供する。
【解決手段】 駆動機構を有する人形と、前記人形と一体とされる音声合成装置本体とスピーカ、前記音声合成装置本体内部に設置される音声混合回路から構成され、前記音声合成装置本体はスピーカとハンディマイクとが接続可能であり、前記音声混合回路は、マイク端子から入力されたアナログ信号とオーディオ端子から入力されたアナログ信号をミキサー回路により重ね合わせ、メインアンプを通してから人形の足部に設置されたスピーカから拡声するものであり、ドライバにより駆動機構の動力源への電圧の印加を行い、駆動機構により人形を動作させる発音玩具とするものである。
(もっと読む)
玩具
無線リンクを介して、データを送信し、受信するための送受信機(24、28)と、プロセッサ(18、32)と、表現応答を記憶するためのメモリ(34)と、表現応答のための出力部(22、38)とを含み、表現応答に関するトリガーデータを受信し、トリガーデータが受信された場合に表現応答を選択し、前記出力部を介して前記表現応答を表現し、応答が出力されたことを示すトリガーデータを一斉送信するよう動作可能であることを特徴とする玩具が提供される。第2の玩具(12)のある所にある第1の玩具(10)からの第1の表現応答をアクティブにするステップと、前記第1の玩具(10)から前記第2の玩具(12)に、前記第1の表現応答を示すトリガーデータを送信するステップと、前記第2の玩具(12)が、前記データを受信した際に、メモリ(34)から第2の表現応答を選択し、前記第2の表現応答をアクティブにし、前記第1の玩具(10)に対する前記第2の表現応答を示すトリガーデータを送信するステップとを含むことを特徴とする第1(10)及び第2(12)の玩具間の交信の方法が提供される。 (もっと読む)
運動体制御システム、運動体及びそのプログラム
【課題】MIDIデータから得られた演奏データを、演奏人形を駆動する駆動データとして用いることにより、メロディと同期が取れ、自然な動作を行うことができる運動体の駆動制御を行う運動体制御システム、運動体及びそのプログラムを提供すること。
【解決手段】記憶部1にはMIDIデータから得られたMIDIチャンネル情報、音色情報、音階情報、音長情報及び音強情報から成る演奏データが格納されている。制御部2は、記憶部1から演奏データを呼び出し、演奏データのMIDIチャンネル情報に基づいて、そのMIDIチャンネル情報に対応する演奏人形3〜5に演奏データを供給する。演奏人形のメロディ・駆動制御部12は、演奏データの音色情報、音階情報から駆動部10を判定し、演奏データの音長情報、音強情報から駆動時間を判定する。そして、これらの判定結果に基づいて、複数の駆動部10を制御する。
(もっと読む)
キャラクター操作システム及びプログラム並びに方法
【課題】観察者に親しみを与える腹話術型のキャラクター操作システムを実現する。
【解決手段】本発明の一態様のキャラクター操作システム1は、操作者発声モードかキャラクター発声モードかの設定を受けるモード制御手段4と、操作者2の音声データを入力する音声入力手段5と、操作者2の画像データを入力する画像入力手段8と、操作者2の音声データが入力されていないと判断された場合に、画像入力手段8によって入力された操作者2の画像データを操作者の無発声状態の画像データとして記憶する記憶手段9と、キャラクター発声モードが設定されている場合に、操作者の無発声状態の画像データをキャラクター13側に出力し、操作者発声モードが設定されている場合に、画像入力手段8によって入力された操作者2の画像データをキャラクター13側に出力する画像出力手段15と、音声入力手段5によって入力された操作者2の音声データを、キャラクター13側に出力する音声出力手段14とを具備する。
(もっと読む)
コミュニケーションロボット
【構成】 コミュニケーションロボット12はCPUを含み、CPUはロボット12の全体処理を司る。ロボット12は、人間14とのインタラクション中におけるモーションキャプチャシステム20から入力される座標データおよび方向データから、自身と人間14との距離(対人距離)およびロボット12に対する人間14の顔の向きを検出する。ロボット12は、対人距離および人間14の顔の向きからインタラクションパラメータ(対人距離、注視時間、モーション開始時間、モーション速度)の適切度すなわちインタラクションの快・不快を検出し、これを最適化するように、インタラクションパラメータを更新する。
【効果】 個別に適応して快適なインタラクションを行うことができる。
(もっと読む)
NAM音対応玩具装置、NAM音対応玩具システム
【課題】第三者に気付かれることなく玩具の動作を制御し、または自由な発話内容を発声可能とする玩具を実現する。
【解決手段】発声器官の運動に伴う共振フィルタ特性変化により調音された、声帯の規則変動を伴わない、外部からは非可聴な呼吸音の体内軟部組織を伝導する振動音である非可聴つぶやき音(NAM音)に対応する信号に応じて、スピーカー2から音を出力したり、モータを駆動して尻尾10を揺動する等の動作を行う。
(もっと読む)
知能ロボットおよびそのロボットを用いたモバイルゲーム方法
本発明は、音出力部(20)及び表示部(22)を備えた知能ロボットに関するものである。この知能ロボットは、操作感知部(10)、格納部(18)および中央処理部(12)を含む。操作感知部(10)は、ユーザの各操作をそれぞれ感知する。格納部(18)は知能ロボットの動作に必要な各種データを格納する。中央処理装置(12)は、操作感知部(10)から提供されるユーザの特定操作感知信号に対応する知能ロボットの特定反応データを得るために格納部にアクセスし、特定の操作に対応する音を音出力部(20)を介して出力し、ユーザの操作に応じて知能ロボットを成長させ、表示部(22)に前記知能ロボットの状態を表示する。  (もっと読む)
(もっと読む)
ロボット装置及びその動作制御方法
【課題】 ユーザ等のコミュニケーション対象をより飽きさせることのないカオス的な動作を自身の身体性に基づいて発現することが可能なロボット装置及びその動作制御方法を提供する。
【解決手段】 自己モーション算出器12は、全関節角の時系列情報に基づいて、自身の動作のみに由来する動きベクトルを算出する。モーション混合器13は、この自身の動作のみに由来する動きベクトルに基づいて入力画像の動きベクトルを補正することで、自身の動作のみに由来する動きベクトルとユーザの動作のみに由来する動きベクトルとが所望の比率で混合された動きベクトルを生成する。そしてBR抽出器14は、生成された動きベクトル等から動き特徴量を抽出し、動作生成器15は、動作ルールベース記憶器16に記憶された動作ルールベースを参照しながら、抽出された動き特徴量に応じた動作を生成する。
(もっと読む)
機能ブリックを有する玩具建造システム
機械的なトリガ作用に応答して機能を実行するようになっている機能ブリックと、機械的なトリガ作用に応答して出力を生成するようになっているセンサを有するセンサブリックと、センサブリック出力に応じる入力を有し、且つセンサブリック出力に対して論理機能を実行すると共に論理出力を生成するようになっている論理ブリックとを有する玩具建造システム。センサブリック出力および論理ブリック出力は連結手段に対して第1の一定の様式で配置され、センサ出力作用および論理出力作用は一定の物理的性質を有する。論理ブリック入力及び機能ブリック入力は連結手段に対して第2の一定の様式で配置される。機能ブリック入力は論理ブリック出力に応じるものであり、論理ブリック出力に応答して機能を実行するようになっている。 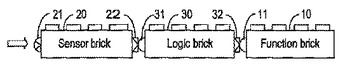 (もっと読む)
(もっと読む)
風水による販売方法
【課題】 本発明は、風水に関連して販売する販売方法を提供する。
【解決手段】 収納箱を風水に関連する色とし、且つ、風水に関する説明書を添付して販売することによって、販売促進となる。
(もっと読む)
対話型玩具
【課題】多数の反応データの有効活用が可能な対話型玩具を提供すること。
【解決手段】外部刺激を入力するための刺激入力装置と、多数の反応データを記憶する記憶装置と、前記記憶装置から前記反応データを読み出して反応装置に所定の反応を行わせる処理装置とを備える対話型玩具において、複数の評価レベルが設定されると共に前記反応データが複数のグループに分類され、さらに、各評価レベルで前記グループの出現確率が設定され、前記外部刺激の量又は質の評価結果に応じて評価レベルが可逆的に変更できるように構成され、その時々の評価レベルに応じた反応を行うように構成されている。
(もっと読む)
脚式移動ロボット
【課題】足部に帯電する静電気を効果的に放電して除去するようにした脚式移動ロボットを提供する。
【解決手段】基体と、2本の脚部と、そのそれぞれの先端に足関節を介して連結される足部22と、足部22と脚部の間に配置されて足関節を駆動する電動モータ20と、足部と脚部の間に配置されて足部22が接地する床面Fから作用する床反力を検出する6軸力センサ56とを少なくとも備えると共に、足部22に床面と接地するときの衝撃を緩衝する緩衝部材224を備えてなる脚式移動ロボットにおいて、足部22の緩衝部材224に導電部材226を設ける。
(もっと読む)
対話型ペットロボット
【課題】発話フレーズ数や待受けフレーズ数の制約があっても、会話を促進可能な新規な対話型ペットロボットを提供する。
【解決手段】対話型ペットロボットは、記憶部より読み出されたプログラムの記述にしたがった処理を行う制御部9とを有する。プログラムは、ユーザとの会話の進行手順を分岐付で規定しており、ある質問の内容と、質問に対する返答となる複数の選択肢と、選択肢のそれぞれに対するアクションとが対応付けて記述されている。質問の内容が音声出力された場合、質問に対する返答の候補として、質問に対応付けられた複数の選択肢をディスプレイ3に表示させる。ディスプレイ3に表示された複数の選択肢のうちのいずれかがユーザによって全文が発話された場合、音声認識を行って、ユーザの発話に対応する一の選択肢を特定するとともに、この一の選択肢に対応するアクションを、返答に対して対話型ペットロボットが次にとるべき反応として決定する。
(もっと読む)
玩具箱
【課題】
蓋部材を駆動装置によって駆動し、蓋部材の開く動作に連動して玩具体が表出し、蓋部材から玩具体を脱離させることができる玩具箱を提供する。
【解決手段】
玩具箱1は、箱本体2と、箱本体2に設けられた蓋部材40と、蓋部材40を開閉させる駆動装置70と、蓋部材40に着脱可能に取り付けられた玩具体51とからなる。蓋部材40には、第1の磁石部材50が設けられ、玩具体51には、強磁性体で形成された環状の係止具55が設けられている。玩具体51は、第1の磁石部材50に係止具55が吸着されて蓋部材40に取り付けられている。
(もっと読む)
少なくとも2つのインタラクティブシステムを互いに競合させる方法及びインタラクティブシステム競合装置
本発明は、少なくも2つのインタラクティブシステムを互いに競合させる方法であって、第1インタラクティブシステムのメッセージが音声視覚及び/又は触覚表現の形式により第1インタラクティブシステムにより出力され、音声視覚及び/又は触覚表現が、入力信号として第2インタラクティブシステムにより検出される方法を記載する。入力信号は、メッセージのコンテンツを求めるため、第2インタラクティブシステムにより解析され、メッセージのコンテンツ及び与えられた競争ルールに依存して、第2システムの応答がトリガーされる。さらに、本発明は、当該方法に従って競争に参加するのに利用可能なインタラクティブシステムと、このようなインタラクティブシステムを少なくとも2つ備えるインタラクティブシステム競争装置とを記載する。  (もっと読む)
(もっと読む)
動作玩具
【課題】 迅速な動作を行う。
【解決手段】 進退移動を行う移動体13と、移動体の進退移動の駆動手段14と、駆動手段の出力に基づく回転駆動力を移動体の進退移動に沿った直動駆動力に変換して当該移動体に伝える伝達機構20とを備え、伝達機構が、進退移動方向に沿って配設された二つのラック部材21,22と、駆動手段により回転駆動して二つのラック部材に互いに逆方向への直動駆動力を付与する歯車機構30とを有している。
(もっと読む)
警備ロボット
【課題】車などの移動体に搭乗可能なロボットであって、ロボット自ら異常の度合を判定し、それに応じて動作するようにした警備ロボットを提供する。
【解決手段】加速度センサ(内界センサ)およびCCDカメラ、マイクロフォンなどの外界センサを備え、それらの出力から得られる情報に基づいて車Vに生じつつある異常の度合をSMALL,MEDIUM,LARGEと判定し(S10から16)、判定された異常の度合に応じて注意、警告、制止のいずれかからなる防止動作を行う(S18から28)。
(もっと読む)
ロボット装置及びその制御方法
【課題】マイク、カメラや種々のセンサで検出することが困難であった外部に存在する対象の情報の正確な確認や識別を可能とするロボット装置を提供する。
【解決手段】自律的に行動を出現させると共に、外部からの入力情報に応じて行動が制御されるロボット装置は、外部に存在する対象に設けられた無線タグ、いわゆるRFID(Radio Frequency Identification)タグから、該RFIDタグに記憶されているデータを読み取る無線タグ読取手段であるRFIDリーダ部19と、RFIDリーダ部19により読み取られたデータに応じた上記対象に関連する情報である対象関連情報に対応する状態認識情報に基づいて行動を制御するコントローラ10とを有する。
(もっと読む)
ロボットシステム及びロボット装置の制御方法
【課題】本発明は、より一層エンターテインメント性を向上させることを目的とする。
【解決手段】複数のロボット装置が自律的に行動するロボットシステムにおいて、各ロボット装置は無線通信手段を有し、ロボット装置同士で会話する際、当該会話の内容をコマンド及び又はセマンティクスとして双方の無線通信手段を介してロボット装置に送受信するようにした。
(もっと読む)
61 - 80 / 81
[ Back to top ]